
双目立体视觉方法测量雷管药量高度
2014-03-26 07:32:12岳晓峰
长春工业大学学报 2014年2期
王 乐, 岳晓峰, 宋 雷
(长春工业大学机电工程学院,吉林长春 130012)
0 引 言
随着我国经济建设的高速发展,矿山等企业的生产规模不断扩大,以及工程爆破的多样化,对雷管、炸药等火工产品的需求日益增长。雷管的起爆过程是在外界冲能(电、磁、热等)的激发下,迅速由爆燃转为爆轰,以引爆雷管中的猛炸药,并使之完全爆轰,从而引爆炸药。药柱爆轰成长期的长短与装药密度的大小和均匀性有关系,因此,装药高度对雷管品质有很大的影响,雷管企业在生产中需要对雷管中所装的起爆药量及猛炸药量进行检测才能保证出厂产品的质量。传统的雷管装药高度的测量方法是人工检测和机械式传感器检测。人工目测的方法简单,但生产员工的工作疲劳性、责任心等人为因素对产品的质量和后续使用有直接影响,使得检测精度不高、误差大、波动性较大,并且达不到安全要求;机械传感器是一种直接检测的方法,需要直接或半间接使用电压,电流信号应用到检测中,安全性较低,且其量程改变较为复杂,同时由于相应传感器检测方式下体积较大,在多发群模生产条件下安装困难,很难满足工厂多品种实时检测要求。恶劣的生产环境和生产高安全系数要求使得企业十分迫切需要一种智能化检测仪器来解决生产的瓶颈问题。所以,文中采用一种基于双目立体视觉[1]的测量系统对雷管装药高度进行测量。
1 双目立体视觉系统相关原理
双目视觉的测量原理是从两个视点同时观察同一物体,以获取在不同视角下的被测物图像,通过三角几何原理计算得出图像像素间的位置偏差(即视差)来获取景物的三维信息[2]。
构成三维空间结构的最基本单元是空间点,理论上可以由点形成线,由线形成面,再由各种面构成三维立体结构[3]。原理图如图1所示。
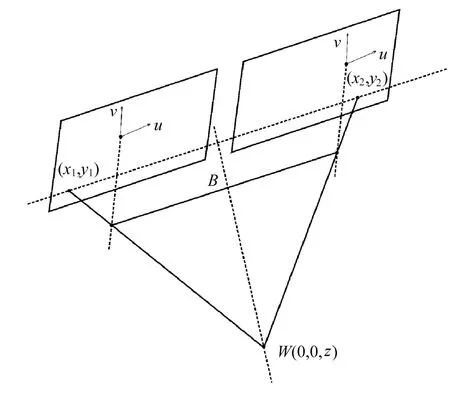
图1 双目成像示意图
在双目视觉测量中,两台摄像机分别接入双输入通道图像采集卡或分别接入单通道图像采集卡,将摄像机采集到的模拟信号经过滤波、采样、量化、A-D转换,向计算机提供数字图像数据。在典型双目视觉系统中,两台摄像机光心沿基线放置,其光轴平行或者互成一定角度,空间点分别在左右两个摄像机像平面上的投影成像。成像点之间的坐标差异称为“视差”[4]。双目视觉测量系统通过极线约束和图像匹配寻找空间点在双目视图中的公共特征点,采用标定后的摄像机内外参数和计算机的视差,通过摄像机模型可获取空间点的三维空间坐标。双目视觉测量的计算涉及图像处理、特征提取、图像匹配、摄像机标定及摄像机模型分析等。
2 双目立体视觉系统标定
2.1 标定原理
空间某点的三维几何位置坐标与其在图像中对应点之间的相互关系是由摄像机成像的几何模型参数决定的,这些几何模型参数就是摄像机标定。
在图1中,通常规定点W所在的坐标系为世界坐标系,可以表示为O-XwYwZw,该坐标系中的任一点坐标可以表示为(xw,yw,zw),点(x1,y1)(x2,y2)所在的坐标系为计算机图像平面坐标系,该坐标系表示为u-v。
在摄像机线性成像模型中,可以得到计算机图像坐标(u,v)和世界坐标(xw,yw,zw)的转换关系为:
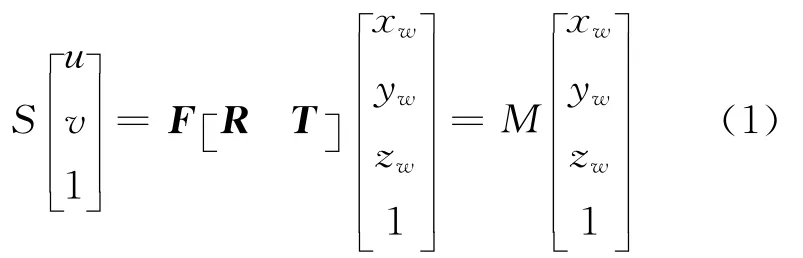
式中:S——比例因子;
F——内参数矩阵;
R——旋转矩阵;
T——平移矩阵;
[R T]——摄像机外参数矩阵。

式中:fx,fy——X,Y方向上的焦距,单位为像素;
Cx,Cy——分别为主光轴与像平面交点的计算机图像坐标。
标定的任务就是要求解出内外参数矩阵。在摄像机畸变模型中,设理想成像点的物理坐标为(xu,yu),畸变后的坐标为(xd,yd),可以得出:

式中:k1,k2——畸变参数。
由图1可以知道,点W在z轴上的坐标可以通过计算求得,公式为:

通过摄像机标定,可以求得摄像机的畸变系数,利用式(3)能够知道畸变后的坐标值,将求得的结果代入式(4)中即可求出空间点W 的坐标值。
2.2 标定方法研究及结果
摄像机标定一般可以分为传统的摄像机标定和摄像机自标定两类。从计算方法的角度上来看,传统的摄像机标定方法有透视变换法、两步法、双平面标定法和张正友平面模板法[5]。本实验所采用的是维视图像的CCAS单双目视觉标定算法软件,该系统所用的标定方法就是利用张正友的平面模板法。通过分别拍摄5幅不同角度和位置的标定板图像来解出摄像机的内外参数和畸变系数。该系统利用的研究平台具有精度高、速度快、操作方便简单等优点。实验过程如图2所示。

图2 拍摄5个不同角度的标定板图像
实验结果如下:
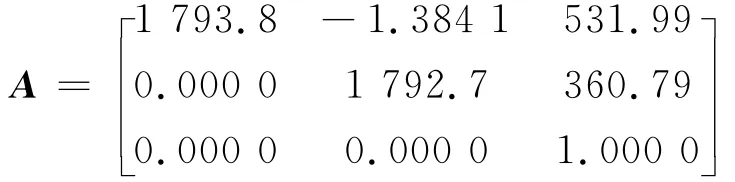
左摄像机:
一阶径向畸变系数K1=0.108 3
二阶径向畸变系数K2=-0.401 8
内参矩阵:
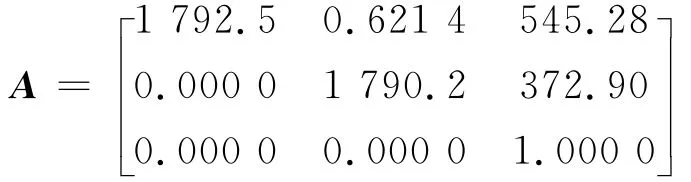
右摄像机:
一阶径向畸变系数K1=0.039 3
二阶径向畸变系数K2=-0.171 5
内参矩阵:
旋转矩阵:
平移矩阵:

对标定结果进行误差分析,可知该标定结果的残差为0.5个像素,摄像机的分辨率为1 024× 768,可以进一步计算出此标定结果的误差大概为0.6μm。
3 数据处理
通过摄像机标定公式计算后,可以得到与物体高度相关的坐标信息,对利用标定后的摄像机所获得的图像进行一系列图像处理后,可得到物体的点云模型,如图3所示。
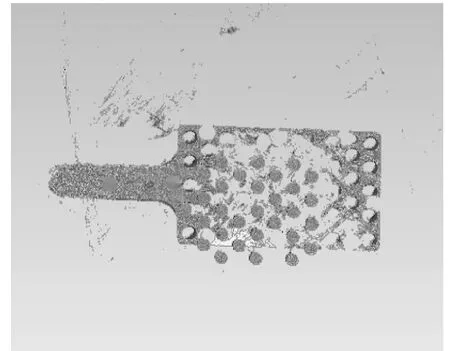
图3 原始点云图
利用美国公司生产的Geomagic Studio软件进行数据处理[6],得到高度信息。
经过合并点对象,将点云着色后,再去除体外孤点,体外孤点是指模型中偏离主点云距离比较大的点云数据,通常是由于采集过程中不可避免地采集到背景物体,如桌面、墙壁、支撑结构等,必须删除[7]。
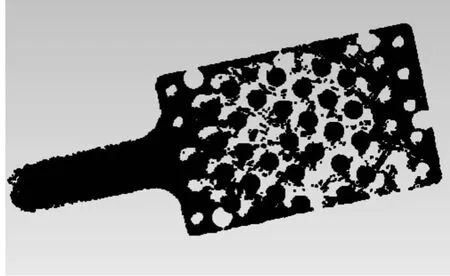
图4 去除体外孤点后
去除体外孤点后进行减少噪声处理,该命令用于减少在获取点云过程中产生的一些噪声点数据,减噪处理可以使数据平滑,降低模型的这些偏差值。如果处理的效果不理想,可以适当增加迭代的次数。处理后的数据经过统一采样后,在保持模型精确度的基础上减少了点云数据量的大小。点处理阶段的最后操作就是封装数据,封装后的模型是以多边形的方式显示的,如果拉近视图就可以发现,模型的表面是由一个个极小的三角形组成。我们下一步的任务就是对这些三角形进行操作。点云经过点阶段模型处理后,进入多边形处理阶段。首先,执行[创建流型]命令是为了删除模型中的非流型的三角形数据。创建流型后可进行[填充孔]操作,该命令用于填补进入多边形阶段由于数据基本点稀疏所造成的空缺。填充后的模型如图5所示。
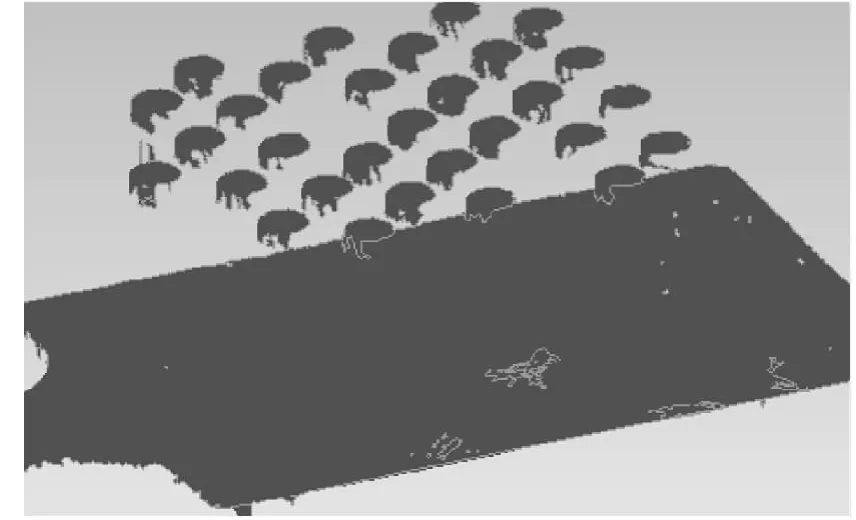
图5 填充孔后模型
对于模型上原有的特征孔要予以保留,不可盲目地进行全部填充。经过一系列的多边形阶段的处理,模型边界变得平滑,可以方便得出有关的高度信息。Geomagic Studio中初始界面上有测量命令,可直接进行选择,系统自动生成坐标系,给出与高度相关的有关信息即为所求,如图6所示。

图6 数据测量结果
在实际模型测量时,可量得实际高度为52.30 mm,实验测得结果有少许误差存在,还需要进一步的改进,此方法获得的数据也可适用于初步的检测,实验结果完整可靠。
4 结 语
详细介绍了双目视觉的原理及摄像机标定的相关知识,以及应用Geomagic Studio软件对得到的点云图进行处理,得到理想的数据,也为后面的研究提供了详细的理论依据。文中方法操作简单,结果精确,应用范围广。
[1] Psang Dain Lin,Chia-Hung Lu.A new model of binocular stereo vision system[C]//The International Symposium on Precision Mechanical Measurements.Hefei,China:[s.n.],2002.
[2] Peng Wang,Huashu Sun,Changku Sun.Study on flexible calibration method for binocular stereo vision system[C]//2008 International Conference on Optical Instrumentsand Technology.Beijing,China:[s.n.],2008.
[3] 刘俸材,谢明红.双目视觉的立体标定方法[J].计算机工程与设计,2011,32(3):1508-1512.
[4] 李洪海,王敬东.摄像机标定技术研究[J].光学仪器,2007,29(4):7-12.
[5] 张宏.基于简单几何知识的摄像机标定的算法[J].机械与电子,2009,19:76-77.
[6] 周建强,李建军.逆向工程技术的研究现状及发展趋势[J].现代制造技术与装备,2006(3):3-5.
[7] 成思源,谢韶旺.逆向工程技术及应用[M].北京:清华大学出版社,2010.
猜你喜欢
电子制作(2019年20期)2019-12-04 03:51:38
世界有色金属(2019年21期)2019-02-09 17:28:26
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
现代计算机(2016年11期)2016-02-28 18:35:20
弹箭与制导学报(2015年1期)2015-03-11 15:32:17
癌变·畸变·突变(2014年2期)2014-03-01 04:39:41
机械与电子(2014年2期)2014-02-28 02:07:46
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03
癌变·畸变·突变(2014年6期)2014-02-27 06:15:03
科技传播(2011年7期)2011-04-13 02:48:54
