
VISSIM仿真系统在交通信号控制教学中的使用
2014-03-25 07:11沈雅婕
实验技术与管理 2014年2期
沈雅婕
(浙江警察学院 治安系, 浙江 杭州 310053)
1 交通信号控制的仿真教学和VISSIM
交通信号控制是道路交通管理的重要措施,是保证交通安全和提高通行效率的重要手段[1-2]。近年来,多数设立交通工程学科的高校均已开设交通信号控制等相关课程。在教学过程中,为了提高学生对控制模型与控制效果的理解,需对多种信号控制模型的效益、信号配时参数的设置及参数敏感性进行实验分析。为安全起见,实际交通系统的控制方案必须是成熟的,而且不能轻易进行实验[3-4]。因此,有必要系统地提出基于仿真实验的交通信号控制教学与分析方法[5]。
国内学者已使用仿真实验的方法对交通信号控制问题展开了较多的研究。文献[6]使用 Monte Carlo算法进行交通流仿真,基于以太网实现了交通信号控制器和计算机的交通控制;文献[7]选择了PARAMICS、VISSIM、AIMSUN2和CORSIM这几种常用的微观交通仿真软件,考察它们对智能交通系统(ITS)模拟的支持情况;文献[8]基于VISSIM仿真系统,提出一种对多路口交通控制仿真系统的研究方案;文献[9]采用改进的元胞传输仿真模型对信号控制路网上交通流的运行与演化过程进行仿真并获取各个优化目标值;文献[10]使用VISSIM仿真系统,以典型十字形交叉口的信号配时仿真为例,探索将VISSIM仿真系统用于交通管理与控制的可能性。然而,这些研究只是针对某个具体问题提出相应的解决方案,在教学上的普适性和可扩展性不够。
笔者在交通信号控制的教学中,选用一款成熟、稳定、可靠、扩展性强,并能满足各种不同类型研究需求的仿真实验系统。VISSIM仿真系统由德国PTV公司开发,是目前国内用户较多的商业微观交通仿真系统。路网交通模型、交通控制模型是VISSIM的两类基本的仿真模型,能实现VISSIM系统的标准仿真功能。此外,VISSIM仿真系统还提供了各种应用接口,使用户能利用VISSIM的平台拓展其应用功能[11]。因此,VISSIM仿真系统能很好地满足交通信号控制教学的需求。
本文基于VISSIM仿真系统,探讨在交通信号控制教学中如何实现对实际交通环境、交通流与信号控制的仿真模拟及相关问题。主要包括基础数据调研与输入模块、路网模型建立模块、交通信号控制模块、仿真与评价模块以及基于VISSIM-COM接口的二次开发高级技巧。
2 基础数据调研与输入
使用VISSIM仿真系统模拟实际道路交叉口进行交通信号控制实验教学时,首先应对实际道路交通环境进行调研,采集相关的基础数据,标定仿真中道路交通流的基础属性。需采集和调研的数据主要包括:路网属性数据,交通流属性数据和交通控制属性数据。
2.1 路网属性数据与输入
路网属性数据的作用是为仿真路网的建立做准备。需采集的路网属性数据主要包括:路段车道数与车道宽度,交叉口进口道分车道功能(直行、左转、右转)的车道数与车道宽度,公交车站的位置与站台容量等。在VISSIM仿真中,路网属性数据主要通过Link & Connectors模块输入。
2.2 交通流属性数据与输入
交通流属性数据是为了标定仿真中的车辆运行特性。需调研和采集的交通流属性数据主要包括:
(1) 汽车交通流中各不同类型车辆的比例,如小汽车占98%,公交车占2%;
(2) 各不同类型车辆的期望行车速度,即如果没有其他车辆干扰,车辆将会采用的行车速度,一般可用道路限速值;
(3) 交叉口分车道功能的交通流量,例如研究时段为1 h,则需调研1 h交叉口各方向进口道分车道(左转、直行、右转)的交通量,交通流量数据将会直接反映交叉口的拥挤程度,是需要在实地认真采集的数据,在VISSIM仿真中可借助Vehicle Inputs和Routes模块进行输入;
(4) 可对交通流特性数据进行调研,如车辆的最大与最小加速度等,也可以使用VISSIM仿真中的默认值。
以上(1)、(2)项交通流属性数据可直接在VISSIM仿真中的Traffic Composition模块中输入。
2.3 交通控制属性数据与输入
交通控制属性数据可以被认为是交通流运行的环境属性,对交通流具有强制性。需调查的交通控制属性数据主要包括:
(1) 无信号控制交叉口的行驶规则,如减速让行或停车让行,在VISSIM仿真中通过Priority Rules和Stop Sign模块输入;
(2) 信号控制交叉口的行驶规则,主要包括信号控制类型,如定时控制交叉口、感应控制交叉口等以及相应的控制参数如周期、绿信比、相位差、相位相序等,在VISSIM仿真中通过Signal Control模块实现输入。
3 路网模型建立模块
在获得路网属性数据之后,如何在VISSIM系统中建立与真实路网一致的仿真路网是本节的重点。在建立路网的过程中还需有实际路网的底图作为背景,如能使用实际路网的AutoCAD电子底图则最佳。如无法获取此资料,可在Google Earth中找到实际路网并截图作为底图,如果要实现基于坐标的高级功能,如实时传回特定车辆如公交车辆的坐标,用来计算公交车辆离交叉口的距离,则可利用平移功能将底图中的参照点(如交叉口的中心点)移动至坐标原点。
在路网模型建立的过程中,有以下注意事项经常被忽视:(1)交叉口之间的路段直接使用Link命令,交叉口内部用Connector连接;(2)在交叉口进口道,左转、直行和右转车道需在仿真中物理分开,而不应相互连接,避免出现在交叉口进口道无法换道的情况;(3)如有公交专用道,可在Link属性数据中设置车道关闭,只允许公交车辆进入该车道;(4)汇流时应设置让行,如右转交通流应让行直行交通流。
4 交通信号控制模块
交通信号控制模块是VISSIM仿真系统的核心模块,在仿真中由Signal Control模块实现。在仿真中进行交通信号控制参数的输入前,需首先对每一个交叉口新建一个信号控制机,并选择信号控制类型。本文主要阐述常用的定时控制类型与感应控制类型。
4.1 定时控制的实现
目前我国大多数信号控制交叉口均采用定时控制,定时控制具有投入和维护成本低、易于实现协调控制等优点。定时控制的关键参数包括:周期、相位数以及相序、各相位的绿灯时间以及绿间隔(黄灯和全红)时间、相位差。以1个周期为80 s、4相位,每个相位的绿灯时长为15 s、黄灯时间为3 s、全红时间为2 s的交叉口信号配时方案为例,在VISSIM仿真系统中设置好配时参数之后如图1所示。
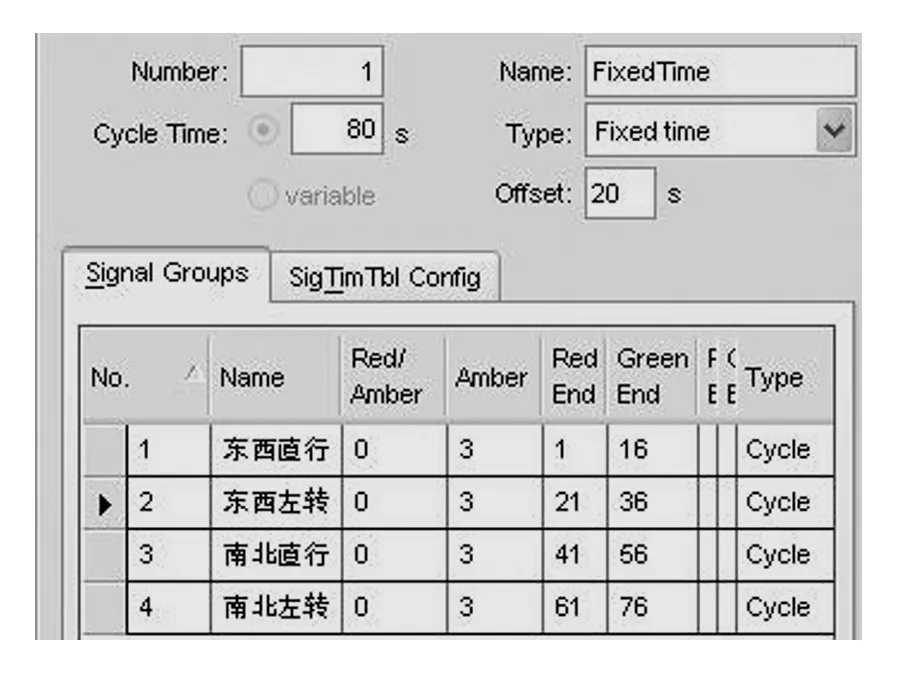
图1 VISSIM系统中定时控制参数配置示例图
在VISSIM中设置定时控制配时方案需注意如下几方面。
(1) 信号周期时长和黄灯时长可在VISSIM中直接输入。
(2) 绿灯时长需通过Red End和Green End计算,Red End代表红灯结束,即表示绿灯开始时刻,Green End代表绿灯结束时刻,因此用Green End减去Red End即代表该相位的绿灯时间,在图1中可看到,4个相位的绿灯时间均为15 s。
(3) 全红时间需通过上下两个相邻相位的绿灯间隔时间设置,如在图1中,相位1(东西直行)的绿灯在16 s时结束,但相位2(东西左转)的绿灯开始时刻(Red End)为21 s,因此这2个相位之间的绿灯间隔时间为5 s,由于黄灯时长为3 s,因此全红时间为2 s,其他相位全红时间的计算方法与之相同。
(4) 由于输入的数值必须大于零,因此第一个相位一般可从第1秒开始。
(5) 理解VISSIM系统中的相位差设置原理。在VISSIM系统中使用绝对相位差的概念,即VISSIM系统中的相位差都相对零时刻进行计算。例如图1中设置相位差为20 s,则表示在仿真开始20 s后到达零时刻,从图1中可以看出,相位1的绿灯开始时刻(Red End)为1秒,则表示在仿真开始21 s后相位1开始亮绿灯。
4.2 感应控制的实现
通过NEMA信号控制模块在VISSIM系统中实现感应控制功能。在信号控制模块中,选择NEMA信号控制模块,并进行参数编辑。常用感应控制的关键参数包括:相位数和相序、各相位最小和最大绿灯时间、各相位黄灯时长和全红时长、相位转换时间。以一个两相位交叉口为例,在VISSIM中设置感应控制的关键参数如表1所示。

表1 VISSIM中设置感应控制的关键参数示例表
在设置的过程中,需注意使相位(Signal Group)与检测器(Detector)相对应,如表1中,编号为1的检测器对应相位1,编号为2的检测器对应相位2,则当编号1或2的检测器上有车辆通过时系统将请求相位1或2的绿灯。
5 仿真与评价模块
仿真与评价模块是最能体现仿真实验价值的部分。一方面,在仿真实验中,能无限制地精确重复实验场景,并可根据实验需要,控制仿真的速度与精度,这是在实际道路交通控制实验中无法实现的。另一方面,在仿真实验中能实时地精确获取评价数据(如延误、停车次数等),能直接对控制模型的优劣进行衡量,也是在实际道路交通信号控制实验中无法做到的。
5.1 仿真模块
VISSIM仿真系统中的仿真控制由Simulation模块实现,能够实现连续仿真和单步仿真的功能。在参数设置选项中需设置以下仿真关键参数。
(1) 仿真时长(Period),如设置仿真时长为3 600 s。
(2) 仿真分辨率(Simulation resolution),即仿真中每秒包含多少仿真步,决定仿真的精度。数值越大代表精度越高,在仿真中车辆运行轨迹更连续。在VISSIM系统中,仿真分辨率的最大数值能设置为10,即在仿真中每秒最大可包含10个步长,即表明VISSIM仿真系统最大支持的仿真精度为0.1 s。
(3) 随机数种子(Random seed)是基于计算机系统进行仿真实验的重要参数,改变此数值后,在VISSIM中的交通流将随之改变。因此,在进行仿真实验验证控制模型的效益时,需改变随机数种子的取值,进行多次仿真并取平均值,以确保仿真结果的合理性。
(4) 仿真速度(Simulation speed)与仿真运行的精度无关。根据不同的仿真需求可设置不同的仿真速度值。如果需模拟实际道路交叉口的运行情况、观察仿真的每一步运行状况,则将仿真速度设置为1仿真秒/s。如果只关心仿真运行完毕后的效益指标,则可将仿真速度设置为最大速度。
5.2 评价模块
VISSIM仿真系统能对仿真状态和仿真效益进行记录和评估,该功能由Evaluation模块实现。常用的能直接反映交通效益的参数指标包括延误与停车次数,在延误评价模块中实现。需设置的关键参数主要为评价开始的时刻点、结束的时刻点和评价的步长。一般选用输出统计数据(Compiled data),输出的结果包括延误、停车次数、评价区段经过的车辆数等。
在延误评价模块的设置中需注意的要点是:(1)为实现延误评价的有效性,需激活行程时间评价模块,因为在VISSIM仿真系统中,延误需通过行程时间间接计算得出;(2)由于仿真开始后,交通流移动至整个道路网络并趋于稳定状态需一定的时间,因此,在进行评价时,采集数据的起点应根据仿真规模,设置为仿真开始后15~30 min;(3)仿真后得到的延误与停车次数数据均为评价区段内每辆车的平均数据。
6 VISSIM-COM接口
VISSIM系统能作为分析交通信号控制问题的有力工具,可以对控制模型的优劣进行比较,观察控制过程中可能出现的问题等。但在学习与研究的过程中,用户的某些个性化需求无法直接使用标准VISSIM仿真系统进行仿真实验,例如实时为公交车辆提供绿灯信号延长、进行大规模海量参数组合的仿真等。针对这些个性化需求,VISSIM提供了COM接口,将路网、车辆、信号灯等封装为对象,用户可以使用主流的编程语言如VB、C++,Java等调用VISSIM仿真系统,使用编程语言实现各种个性化需求。VISSIM-COM仿真中的对象(Object)分布如图2所示[12]。

图2 VISSIM-COM中的编程对象分布图
在使用VISSIM-COM接口时,可遵循以下策略:
(1) 如图2所示,VISSIM-COM接口中的对象是树状结构,若要使用下层对象,需先初始化声明上层对象。例如要使用车辆(Vehicle)对象,首先要声明Vissim、Net和Vehicles对象;
(2) 在编写个性化程序时,可遵循以下格式:
Step 1:初始化VISSIM-COM对象;
Step 2:明确评价参数输出路径和仿真底图路径,并打开仿真底图;
Step 3:用循环语句初始化仿真实验参数,如仿真随机数种子从1到10循环;
Step 4:仿真开始,单步运行程序主体语句;
Step 5:记录效益评价参数,如延误和停车次数;
Step 6:循环所有参数组合,仿真结束。
7 结束语
在交通信号控制的实验教学中,在实际道路交通环境中无法对信号控制模型以及参数进行实验,学生也无法直观地看到模型和参数的改变对交通流运行效益的影响。因此,基于仿真系统的实验方法必然成为较好的选择。本文所阐述的内容能很好地指导交通信号控制的实验教学工作,增强学生对交通信号控制的深层次认识,提高学生的动手能力和实践能力。通过VISSIM仿真系统,使理论学习与实践相结合,学生能直观地观察到信号配时存在的问题,能对交通信号控制的作用和效果有更深刻的认识,增强学习交通控制理论课程的兴趣。学生还可以根据仿真中观察到的问题,重新设计道路交叉口渠化方案和信号配时,提出更好的解决方案,并使用仿真系统验证自己所提出的方案。学生经历从认知到理解、从理解到实践、从实践到创新的学习之路,能够实质性地提高解决实际交通问题的综合能力。
[1] 马万经,聂磊,杨晓光.单点定时信号最优控制模型及仿真分析[J].系统仿真学报,2007,19(19):4543-4547.
[2] 刘进,倪春明.《道路交通控制》实践教学研究[J].云南警官学院学报,2005(3):7-10.
[3] 吴伟,时柏营,谢军.面向交通控制的实时在线仿真参数标定[J].同济大学学报:自然科学版,2011,39(6):842-847.
[4] 翟京,赵韩涛.仿真软件在“交通管理与控制”实验教学中的应用[J].价值工程,2012,31(9):143.
[5] 郑明伟,李梦雪.仿真技术在交通控制上的应用[J].哈尔滨职业技术学院学报,2007(4):115-116.
[6] 丁恒,郑小燕,黄文娟,等.交通信号网络控制实验平台的开发[J].实验技术与管理,2009,26(5):66-68.
[7] 胡明伟,郭秀芝.用微观交通仿真软件实现ITS模拟的比较研究[J].交通与计算机,2004,22(4):19-22.
[8] 周广林,孙耀杰,高骞,等.基于VISSIM的交通控制仿真系统的研究[J].电子设计工程,2011,19(15):19-21.
[9] 高云峰,胡华,韩皓,等.城市道路交叉口群信号协调控制多目标优化与仿真[J].中国公路学报,2012,25(6):129-135.
[10] 吕贞,李成兵.Vissim仿真软件在“交通管理与控制”实验教学中的应用[J].科技视界,2013(18):24,70.
[11] 邹智军.车路集成系统探测车数据采集仿真研究[J].系统仿真学报,2009(18):5955-5959.
[12] PTV. User Manual for the VISSIM COM Interface[M]. VISSIM5.10-03. karlsruhe, 2008.
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
铁道通信信号(2020年8期)2020-01-05
科技资讯(2019年18期)2019-09-17
中国科技纵横(2019年15期)2019-08-27
教育界·下旬(2019年1期)2019-04-26
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
发明与创新(2016年34期)2016-08-22
电子设计工程(2014年17期)2014-02-27
