
三相逆变器的单环与双环控制比较研究
2014-03-25 03:20姚蜀军
电力科学与工程 2014年10期
罗 军,姚蜀军
(华北电力大学 电气与电子工程学院,北京102206)
0 引言
随着三相恒压恒频(CVCF)逆变器在不间断电源(UPS)和新能源并网等领域的应用日益广泛,对其输出波形要求也不断提高。控制器的设计是提高逆变器性能的关键因素,三相逆变器可以通过坐标变换把对象放在dq 同步旋转坐标系中进行控制,原正弦指令变成直流量,可实现逆变器的无静差调节[1]。
单闭环PID 控制器兼有PD 滞后和PI 超前校正的作用,可改善系统的动态和稳定性能,且其结构简单、鲁棒性好、易于实现[2,3]。含电压外环和电流内环的控制方案是高性能逆变器控制的发展方向之一[4,5],双闭环控制包括电感电流内环和电容电流内环[6~8],文献[9,10]指出电感电流反馈的双闭环控制具有较强的抗短路能力,但外特性相对较软;电容电流反馈的双闭环控制外特性硬、稳态精度高,但难以实现过载和短路电流限制,本文采用带负载电流前馈的电感电流内环控制方法,兼顾两种方法的优点。文献[11]指出电压单环能起到和双闭环类似的电压跟踪效果,且认为单环控制的抗负载电流扰动能力优于双闭环控制,但其采用的双环控制不含电流前馈;文献[12]提出了基于极点配置的瞬时电压PID 控制设计方法,并指出逆变器瞬时电压PID 控制在电路结构、成本等方面更具优越性,但未对两种控制方案的性能作比较分析。
本文首先建立三相逆变器在同步旋转坐标系的数学模型,利用极点配置法,分别设计了单闭环PID 和双闭环PI-PI 控制系统参数。配置相同的极点,在PSCAD 中进行仿真分析,结果表明,两种控制方案均具有较高的稳态精度和较快的动态响应速度,但双闭环控制在电流环中增加限流器即可实现自动限流保护功能,且在非线性负载条件下,输出电压总谐波畸变率(THD)较单闭环PID 控制低。
1 三相逆变器模型
典型三相电压源型逆变器如图1 所示。取电感电流和电容电压为状态变量,逆变器在三相静止坐标系下的状态方程如式(1)所示。
通过坐标变换,三相静止坐标系中的基波正弦变量转换为同步旋转坐标系中的直流变量,从而经PI 调节能实现无静差控制。逆变器在同步旋转坐标系中状态方程如式(2)所示。
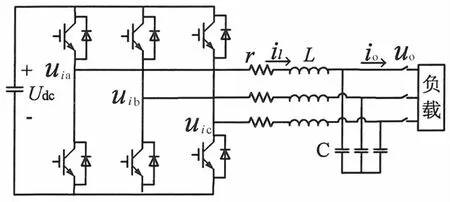
图1 三相电压源型逆变器
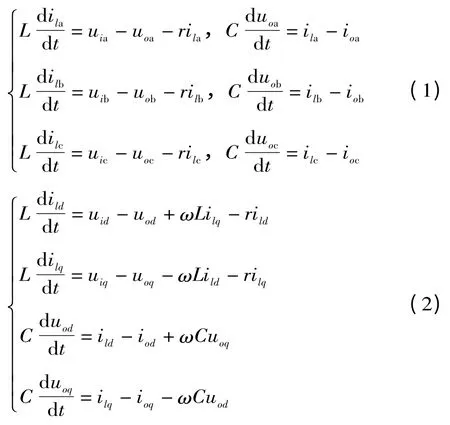
根据式(2)到得逆变器dq 坐标下系统模型如图2 所示,由于dq 轴具有对称性,因此只需分析d 轴即可。
图2 dq 坐标系三相逆变器系统模型框图
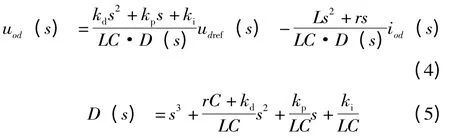
将负载电流视为扰动输入,开环控制逆变器d 轴输出响应如式(3),该传递函数第一部分体现了输出电压对参考信号的跟踪性能,可视为空载输出特性,第二部分体现了负载电流对输出的扰动特性,可视为系统等效输出阻抗特性,第三部分为q 轴对d 轴的耦合扰动输出。


2 两种控制方案设计
2.1 单闭环控制
单闭环PID 控制原理如图3 所示,该控制方案可有效解除dq 轴间的耦合。
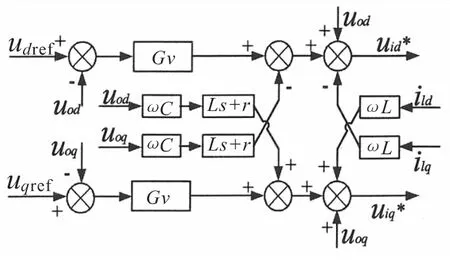
图3 单闭环控制框图
2.2 双闭环控制策略
双闭环控制原理如图4 所示,文献[13]指出当电流内环采用PI 调节器代替P 调节器时可进一步增强双闭环控制的抗负载电流扰动能力。因此本文双闭环控制策略电压外环和电流内环均采用PI 调节器,且增加了负载电流前馈。
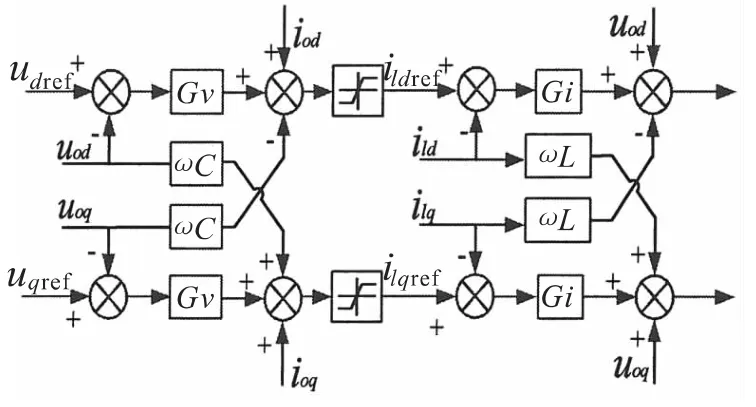
图4 双闭环控制框图
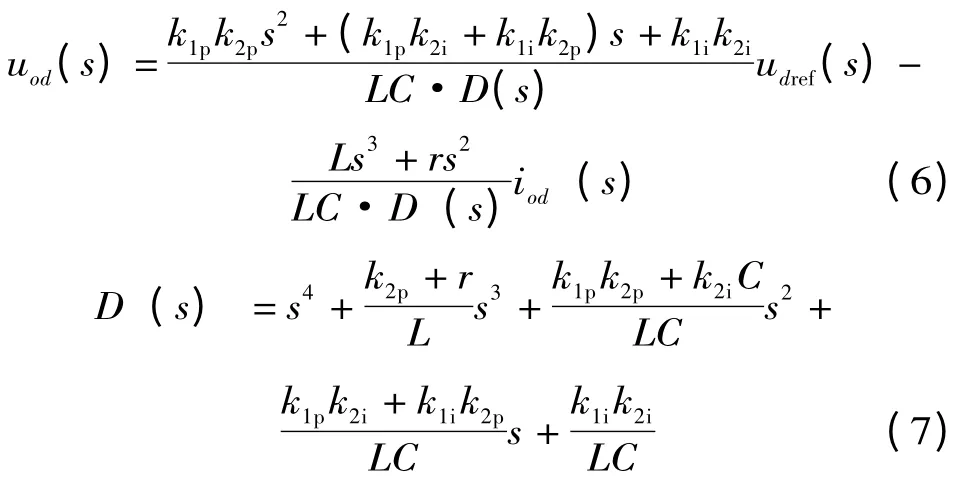
设电压外环电流内环传递函数分别为:Gv=。由图2、图4 得系统d 轴输出响应和系统特征方程分别为[14,15]:
3 参数设计及频率特性分析
极点配置法[16,17]是将系统的闭环极点配置在期望的位置上,以期使系统获得期望的控制性能。据自动控制理论知识,系统的动态性能主要由闭环特征方程的主导极点决定,对比式(5)、式(7)可以发现,两者分别为三阶和四阶系统,可视为双闭环控制相对于单环控制增加了一个非主导极点。本文设计的逆变器滤波参数为L=1.8 mH,C=30 μF,等效阻尼电阻r=0.1 Ω,直流侧电压Udc=800 V,输出电压基波频率50 Hz,相电压220 V(RMS),额定相电流40 A,PWM开关频率fs=10 kHz,通过设定闭环系统期望阻尼比、自然频率和非主导极点位置,即可由式(5)和式(7)分别解得单闭环和双闭环控制系统参数。
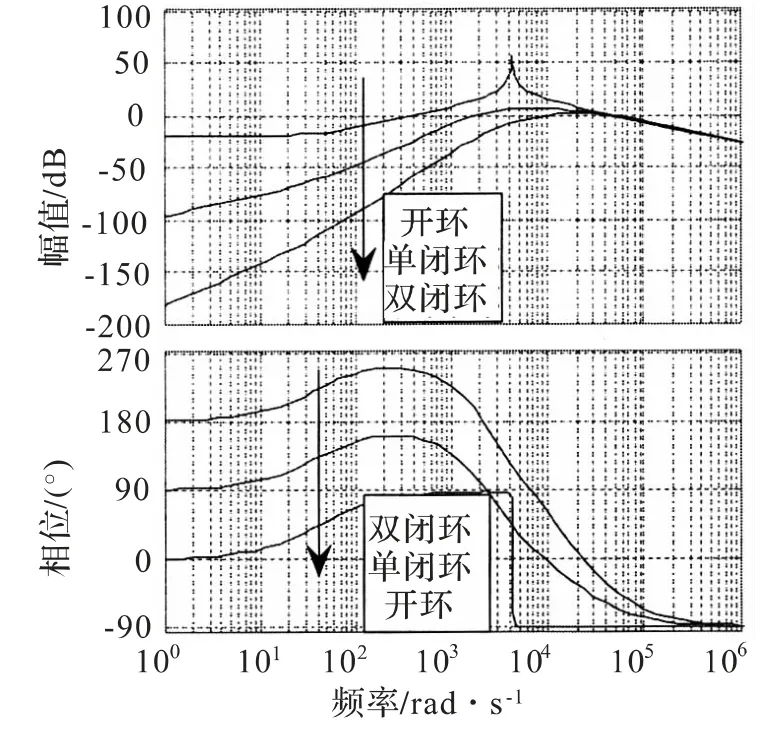
图5 输出阻抗频率特性
图5 为相同极点配置下不同控制方式的逆变器等效输出阻抗频率特性曲线,可见单闭环和双闭环控制均可使不同频率下的逆变器输出阻抗相对于开环大为减小,尤其在低频段双闭环输出阻抗远低于单闭环。由于逆变器带非线性负载时,高次谐波可由滤波器基本滤除,电流谐波成分主要为低次谐波,因此双闭环控制抗负载扰动和带非线性负载能力更强。
4 仿真分析
为进一步探究和验证两种控制方法的控制性能优劣,在PSCAD 中进行下述仿真比较:
(1)动态响应
图6 给出了两种控制方式下突加、突卸额定阻性负载时的三相输出电压、电流和d-q 轴电压波形,可见两种控制方式均具有较快的动态响应速度,负载突变时电压恢复时间均为2.5 ms 左右。
(2)带非线性负载
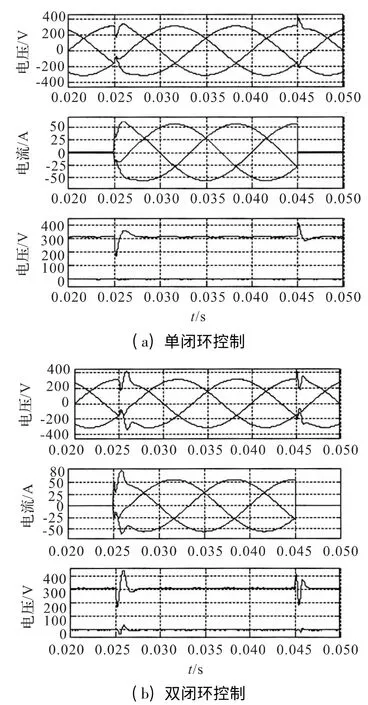
图6 负载突变时电压、电流波形
图7 给出了两种控制方式下带相同非线性负载时的A 相输出电流和电压波形。负载电流峰值达到57.75 A,超过额定电流峰值(I56.57 A),负载电流THD 达37%。单闭环控制下A 相输出电压THD 为4.7%,双闭环下THD 仅为0.87%,可见双闭环控制逆变器带非线性负载能力明显强于单闭环控制。
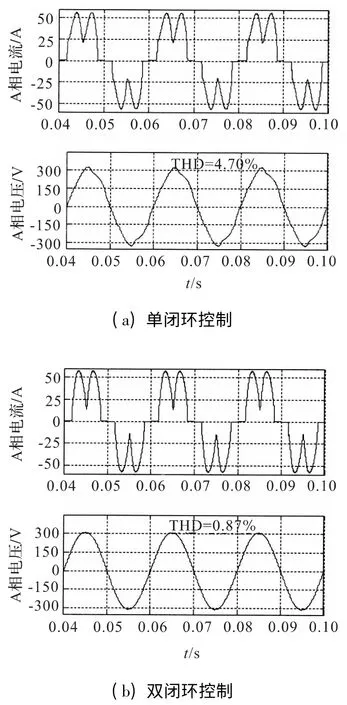
图7 非线性负载下电压、电流波形
(3)限流功能
采用双闭环控制时,在内环电流给定值处加入限幅环节(如图4 所示),可有效限制滤波电感电流,从而实现逆变器输出限流保护功能。单闭环控制由于没有电流内环,限流保护的实现需采取其他措施。图8 给出了限流时三相逆变器负载电流、输出电压和d- q 轴电压波形。t=0.045 s时系统过载50%,即输出相电流有效值应达60 A,由图可见三相逆变器输出电压、负载电流均以基波正弦形式被降低大小。
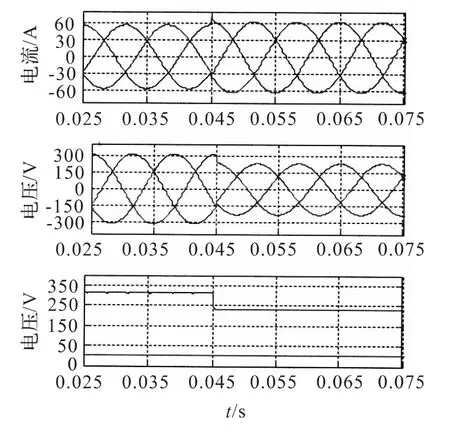
图8 双闭环控制过载限流功能
5 结论
建立同步旋转坐标系中的三相电压型逆变器模型,基于极点配置法设计单闭环瞬时PID 控制器和双闭环PI-PI 控制器。在相同极点配置下,仿真并对比分析了两种方案的控制性能。结果表明:单闭环PID 控制和双闭环控制均具有较快的动态响应速度;因双闭环控制可实现更低的等效输出阻抗,因此非线性负载条件下双闭环控制的输出电压THD 远低于单闭环,带非线性负载能力更强;双闭环控制易于实现输出限流保护功能,限流运行时能保持标准正弦波输出,因此双闭环控制适用于对输出性能要求较高的场合。
[1]彭力.基于状态空间理论的PWM 逆变电源控制技术研究[D].武汉:华中科技大学,2004.
[2]刘慧.大功率三相逆变器控制与并联技术研究[D].武汉:华中科技大学,2008.
[3]吴姗姗,李永东.一种新型恒压恒频逆变电源闭环控制策略[J].电力电子技术,2006,(5):23-24.
[4]Poh C L,Newman M J,Zmood D N,et al.A comparative analysis of multi-loop voltage regulation strategies for single and three-phase UPS systems[J].Power Electronics,IEEE Transactions on.,2003,18(5):1176-1185.
[5]方超.逆变器带非线性负载的控制方法研究[D].哈尔滨:哈尔滨工程大学,2013.
[6]喻晨龙,鞠志忠,祁承超.两种逆变器双环控制技术比较分析[J].通信电源技术,2013,(5):9-12.
[7]燕跃豪,鲍薇,李光辉,等.基于混合储能的可调度型分布式电源控制策略[J].华北电力大学学报(自然科学版),2014,(2):28-35.
[8]韩培洁,张惠娟,李贺宝,等.微电网控制策略分析研究[J].电网与清洁能源,2012,(10):25-30.
[9]许爱国,谢少军.电容电流瞬时值反馈控制逆变器的数字控制技术研究[J].中国电机工程学报,2005,(1):52-56.
[10]郑雪生,李春文,汤洪海,等.三相电压型逆变器的鲁棒跟踪双环控制器[J].清华大学学报(自然科学版),2008,(1):145-148.
[11]黄伟煌,付勋波,林资旭,等.LC 滤波电压源型逆变器闭环控制策略综合对比与设计[J].电力系统自动化,2013,(19):110-115.
[12]彭力,张宇,康勇,等.高性能逆变器模拟控制器设计方法[J].中国电机工程学报,2006,(6):89-94.
[13]何俊.PWM 逆变电源双环控制技术研究[D].武汉:华中科技大学,2007.
[14]Ma X,Wu H,Sun S,et al.Control method with digital PI dual close-loop for inverter[C].Seoul:Internation Conference on Electrical Machines and Systems,2007.102-105.
[15]王念春,徐发喜,程明.基于状态空间的逆变器数字双环控制技术研究[J].中国电机工程学报,2013,33(S1):166-170.
[16]张兴.高等电力电子技术[M].北京:机械工业出版社,2011.
[17]陈超,李鹏,张双乐.基于比例谐振的LCL 型并网逆变器控制系统设计[J].电力科学与工程,2012,28(8):1-6.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
安徽农学通报(2022年8期)2022-05-06
科学与财富(2019年16期)2019-01-04
电子制作(2018年11期)2018-08-04
家用汽车(2016年12期)2017-02-09
现代工业经济和信息化(2016年8期)2016-05-17
公民与法治(2016年24期)2016-05-17
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年24期)2016-04-12
西部广播电视(2015年10期)2016-01-18
