
基于接收信号强度的不同移动终端定位方法研究
2014-03-25 06:12张维李文涛王力
西北工业大学学报 2014年3期
张维, 李文涛, 王力
(西北工业大学 现代设计与集成制造技术教育部重点实验室, 陕西 西安 710072)
自美国E-911定位需求颁布以来,德国、法国、瑞典、芬兰、日本等各国也纷纷推出了对移动位置服务的规定。这使得基于位置的服务(location-based services, LBS)渗透到各行各业乃至人们的日常生活之中,即在无线网络中,用户利用无线移动终端协助确定其实际位置信息,从而获取所需要的与位置相关的服务。
位置指纹(location fingerprinting, LF)方法适合于室内等空间有限的定位环境,其思想是离线阶段测量广泛使用的室内无线局域网中由无线接入点(access point, AP)发出随时可用的接收信号强度(receive signal strength, RSS),利用RSS与对应已知位置的关联性来构建数据库,这些先验数据在应用时可以用来与获取的定位请求信号的RSS比较,通过模式匹配算法得到目标的位置信息。这种方法包含了环境信息,可以大大地提高室内定位精度;不但不需要用数学方法精确描述RSS与距离之间的关系,更不需要预先知道WLAN中APs的具体位置,普适性更强。但是它的最大局限性在于因构建和更新数据库需要花费的大量人力和物力,而不同设备生成的LF地图差异明显[1-2]。
目前解决该类问题的方法分为2类:①不用校正的稳健指纹方法;②需要线上调整RSS到采集设备信号强度的度量方法[3]。文献[4]中使用所有不同AP对采集的RSS比值作为指纹,由于摒弃掉了大量的原始数据信息,当待定位设备与采集设备一致时,定位性能不及传统的RSS指纹定位法。文献[5]中提出了不同设备之间的RSS模式存在线性关系,可以通过转换模式达到提高定位精度的目的。但是要对所有类型的接收设备都人工做一张对应的LF地图是不可能,即使种类有限,工作量也是巨大的。
本文提出了接收信号强度差值法(RSSD)和实时自适应学习规范化法(RSALS),分别用于定位APs一致和不一致的情况,可以在不用更新LF地图的前提下,满足定位多种不同设备的需求,而且会一定程度上提高定位精度。
1 算法描述
将定位场景划分为N个子区域,本算法规定采集参考点(calibration point, CP)为子区域的中心点。由于不知道待定位终端的位置的先验知识,所以我们允许CP并非严格意义上子区域中心。假设定位区域中有M个APs,虽然APs的绝对和相对位置未知,但我们很容易利用每个AP特有的MAC地址,将在CPs处多次测量的RSS生成对应已知子区域的LF地图。
1.1 接收信号强度差值RSSD方法
RSS值与采集设备硬件有关,导致与硬件相关的参数变化,比如天线增益等。换句话说,针对不同设备在同一位置接收到的RSS平均值与硬件有关。RSS均值可以通过下式计算:
E(Pr)=E(Pt-Pl)
(1)
式中:Pr是移动终端接收能量;Pt是AP的发生能量,我们可以根据情况自行设置;Pl是信号传输路径损耗,我们使用对数路径损耗模型,CPi处测得APj的RSS均值可以用平均路径损耗公式计算:
Pl(dij)|dBm=Pl(d0)|dBm+10αlog(dij)+Χσ|dB
(2)
式中:CPi与APj的距离用dij表示,Pl(dij)表示自由空间信号传输dij时的损耗;Pl(d0)是在任意参考距离d0时自由空间的信号传输损耗,通常取d0=1 m;变量α表示该信号传播路径损耗指数;Χσ是均值为0,标准差为σ的高斯随机变量,用来表示信号阴影衰减。
下面我们讨论发射信号的AP设备全部一致的情况,讨论不同接收终端定位问题。假设待定位目标距离AP1和AP2的距离分别是d1和d2,将公式(1)带入公式(2)得:
Pr(d1)|dBm=Pr(d0)|dBm-10α1log(d1)+Χ1|dB
(3)
Pr(d2)|dBm=Pr(d0)|dBm-10α2log(d2)+Χ2|dB
(4)
如果我们假设特定临近室内环境的损耗指数是相同的,即α1=α2=α,将公式(3)与公式(4)相减抵消接收设备差异引入的P(d0)得到:
我们用RSSD代替RSS作为LF,则对应的LF地图中CPi有如下形式:


随着APs数量的增加,训练数据的样本容量随之指数增长。我们假设APs间工作相互独立,即来自不同APs的RSS也相互独立,联合分布可以用边缘概率分布改写:
1.2 实时自适应学习规范化RSALS法
实际定位中会利用实际场景中的很多不同的AP,在AP不相同的情况下上述的RSSD方法性能会大打折扣。所以我们推广到更为普遍的情况,接收设备和发射设备全不相同的情况。我们用Dc表示采集设备,而待定位设备用Do表示,它们对应的LF数据库分别用Rc和So表示,则P(Rc|l,Dc)表示训练设备Dc在位置l时LF为Rc的条件概率,对应的待定位设备的条件概率是P(So|l,Do)。问题转化为找到一个准确的变换方程F,对于任意的位置li可以对So使用变换F后使得概率P(So|l,Do)约等于概率P(Rc|l,Dc),即P(Rc)=P(F(So))。
从学习的角度来讲,有监督地采集训练样本的人力成本太大。而且如果定位设备较多,特别是开放式定位系统中所有进入定位场景的终端都可以实现定位,则不可能将所有可能待定位的设备都与训练设备建立变换方程。所以我们需要无监督式的学习算法。
文献[5-6]中都指出了不同设备的RSS基本属于线性关系,所以我们也使用线性回归算法,并假设待定位设备的RSS地图与训练设备地图间的回归模型是线性关系:Rc=b+a×(So)+ε,其中(a,b)表示转换方程的系数,ε是误差项。我们需要提前确定待定位设备的初始位置,利用该初始位置的Rc与So的数据,使用最小二乘法确定系数(a,b),之后将待定位终端的RSS变换到线下采集设备的LF地图度量中,使用最大似然估计方法计算位置估计。
下面说明初期确立与So对应的Rc的方法,我们采用皮尔森系数法,如下:
式中:j是AP的序号,|Ni|是在位置CPi可检测到AP数量,ri,j是训练设备在CPi的LF,μ(·)是一个随意变量的均值或者期望,si,j是待定位设备的LF。皮尔森相关系数Ri的绝对值在(0,1)之间,其中1代表最佳线性相关性,或者说2个指纹向量具有最大相似性。所以我们可以用皮尔森相关系数测量训练设备和待定位设备的RSS指纹相似性。选出训练设备指纹地图中与实时测量设备测得RSS相关性最高的位置作为定位初始位置。
2 实验与对比
2.1 实验平台搭建
本文的定位实验平台运行在某建筑11层搭建的一个IEEE 802.11b/g/n无线局域网上,所有AP配备的是802.11b/g/n 协议的 2.4 GHz无线网卡,设定发射功率为17 dBm,增益5 dBi,天线高度15 mm左右,全向天线。整个定位系统原型在Microsoft Visual Studio 2010环境下开发,数据库使用MySQL。待定位终端为4台不同品牌的笔记本,分别为Lenovo G430、ASUS X50、HP 6930p、BenQ S41。待定位区域为整个11层,采集点在西边走廊和B1120、B1122、B1125室,如图1所示。定位系统安装在客户端,首先由用户向应用程序提出请求,定位系统获得请求以后,向无线网卡发出指令,启动采集来自各AP的RSS程序。接着,定位算法利用位置指纹数据库和实时收到的RSS估计用户的位置,并返回定位结果。
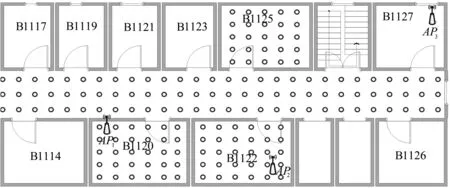
图1 无线定位实验平台区域覆盖图
2.2 实验结果分析
2.2.1 RSALS法基准设备地图建立
实验中我们尽量减小环境和时间上对结果的影响,单纯地关注不同设备对于RSS的影响,测试的设备高度保持稳定。
测试点距离AP2的距离分别是0.3~40 m,每个参考点测试时间为360 s,对采集的真实RSS和对数距离使用MATLAB做线性拟合。如图2所示,可以很明显发现,不同设备同一位置的RSS值差别明显,最大的差别可达到30 dB。由于不同设备在同一参考点上的实验是在不同时间进行的,这必然引入了时间变化对结果的影响,但是它们不能完全解释这么大的差别。我们可以得出结论,Lenovo G430和ASUS X50采集的RSS变化梯度很小,这些设备不适合WLAN的指纹定位技术,它们很难区分临近的位置点。
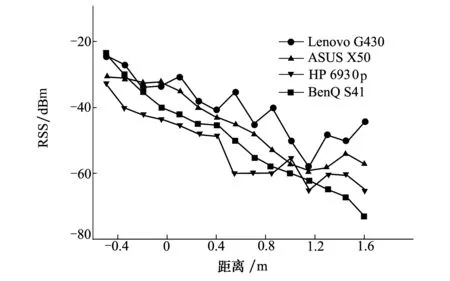
图2 不同设备RSS变化梯度对比
上面用以描述RSS空间变异特性,下面我们用RSS时间变异特性来衡量不同设备用于室内定位的优先顺序。
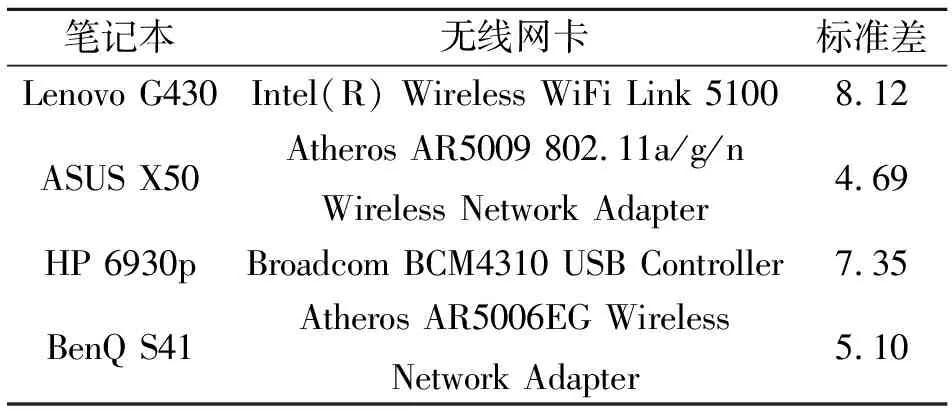
表1 不同设备的标准差
不同设备在同一位置不同时间采集的RSS标准差越低,则定位精度越高。我们可用如下原因解释:当用户询问其位置的时候,设备采集RSS标准差越低,表明实时扫描结果与存储在数据库中结果相似概率越高。
综合上面两方面,本实验选择BenQ S41作为基准设备用以线下采集RSS生成数据库。
2.2.2 设备不一致时RSSD法、RSALS法和传统LF概率法比较
1) AP相同情况
使用BenQ S41作为训练设备,在AP相同的前提下比较RSSD法、RSALS法与Horus定位系统的LF概率法定位ASUS X50的结果,从图3中的实验结果可以看出,RSSD法与RSALS法的定位效果几乎无差别,都明显好于传统的Horus[7]系统定位性能;但是由于RSSD方法不需要线上拟合线性回归模型,所以处理时间上比RSALS有优势。
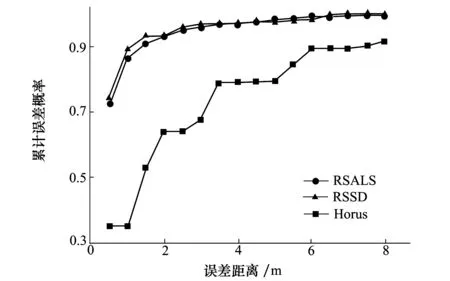
图3 AP相同设备不同时各定位算法对比
2) AP不相同情况
针对AP不同的情况,训练设备使用BenQ S41,待定位设备使用ASUS X50。如图4所示,在AP不相同的情况下,RSALS法性能十分明显好于RSSD,可以做到误差在1.5 m之内的概率超过90%。
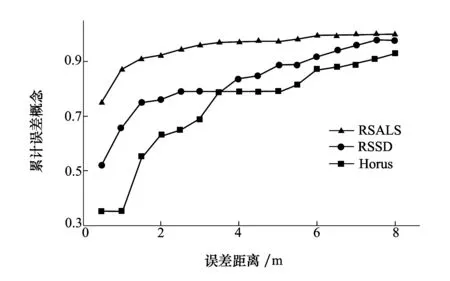
图4 AP不同设备不同时各定位算法对比
2.2.3 设备一致时RSALS法与传统LF概率法比较
下面的实验使用不同的AP组合,我们研究对于训练设备和待定位设备都是BenQ S41的情况下各个方法的定位性能,验证设备一致时使用RSALS法是否必要。
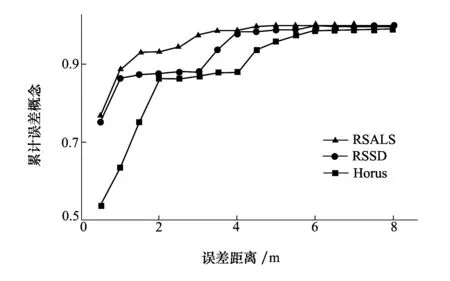
图5 AP不同设备相同时各定位算法对比
通过对比各方法定位精度结果,如图5所示,使用RSALS法和RSSD法定位精度仍然高于传统的Horus[7]方法。这种结果的原因可能是由于我们的训练数据库的环境与实时待定位时的室内环境不完全相同,RSALS法可以抵消部分室内动态变化的问题。而对于RSSD方法,无论线下采集还是实时定位阶段,所有AP受到室内环境的影响有一定的相关性,使用RSSD作为LF比RSS会更加稳健。
3 结 论
本文对基于位置指纹的不同移动终端定位方法做了较为全面的研究,所提出的RSSD和RSALS方法,有效解决了不同WLAN移动终端获取接收信号强度存在差异的问题,并在真实室内WLAN环境下验证了算法的可行性和有效性。本文的实验环境范围较小,但是针对定位场景较大时检索LF地图中的所有参考点,算法实时性会受到严重影响,并对待定位目标的能耗提出了更高的要求。
参考文献:
[1] Park J, Curtis D, Teller S, et al. Implications of Device Diversity for Organic Localization[C]∥INFOCOM, Proceedings IEEE, 2011: 3182-3190
[2] Lui G, Gallagher T, Li B, et al. Differences in RSSI Readings Made by Different Wi-Fi Chipsets: A Limitation of WLAN Localization[C]∥Localization and GNSS, International Conference IEEE, 2011: 53-57
[3] Fang S H, Wang C H, Chiou S M, et al. Calibration-Free Approaches for Robust Wi-Fi Positioning against Device Diversity: A Performance Comparison[C]∥Vehicular Technology Conference IEEE 75th, 2012: 1-5
[4] Kjargaard M B, Munk C V. Hyperbolic Location Fingerprinting: A Calibration-Free Solution for Handling Differences in Signal Strength[C]∥Pervasive Computing and Communications, 2008: 110-116
[5] Haeberlen A, Flannery E, Ladd A M, et al. Practical Robust Localization over Large-Scale 802.11 Wireless Networks[C]∥Proceedings of the 10th Annual International Conference on Mobile Computing and Networking, Philadelphia, 2004: 70-84
[6] Tsui A W, Chuang Y H, Chu H H. Unsupervised Learning for Solving RSS Hardware Variance Problem in WiFi Localization[J]. Mobile Networks and Applications, 2009, 14(5): 677-691
[7] Youssef M, Agrawala A. The Horus Location Determination System[J]. Wireless Networks, 2008, 14: 357-374
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
铁道通信信号(2018年4期)2018-06-06
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
自动化学报(2016年8期)2016-04-16
