一种基于北斗卫星系统的铷钟驯服方法
2014-03-22 05:35崔保健赵海鹰
计量技术 2014年2期
崔保健 才 滢 赵海鹰
(中国人民解放军92493部队89分队, 辽宁葫芦岛 125000)
0 引言
我国自主知识产权的北斗卫星导航系统和美国GPS全球卫星定位系统一样,不仅能够提供高精度的导航定位信息,还能够提供准确的授时信息,即包含卫星状态、导航定位和精密授时信息的导航电文,这些信息通过微处理器的串口输出,而且,两种接收机均提供了精密的秒信号授时信息即1PPS信号,这一信号来自星载源自频率标准,并受卫星地面站的调整与控制,在一些专用的OEM接收机中还提供了100PPS信号。利用GPS接收机授时信号或载波相位信号,不仅可以进行时间传递、频率比对[1-3]对本地频标进行驯服,可以大大提高本地频标的技术性能,相关技术和方法不断报道更新[4-6]和不断完善,其覆盖范围越来越宽广,其应用必将越来越深入。本文对我国的北斗卫星导航系统的精密授时信号进行测试和研究分析,依据其特点,设计了基于北斗导航系统的驯服铷钟的高精度频率标准,使其技术性能得到改善,达到或接近铯原子频率标准性能。
1 BD-2授时信号特点分析
项目中采用WBG12型授时型二代北斗系统接收机,该型号是北斗和GPS双模接收机,将其设置在北斗模式下,其1PPS输出信号和安捷伦5071铯钟的1PPS输出信号的脉冲相位用53132频率计数器进行测量,比较铯钟的1PPS脉冲和BD接收机1PPS脉冲上升沿的相位相对变化,连续测试5天,对测试结果进行坏值剔除处理后,测试结果如图1所示。
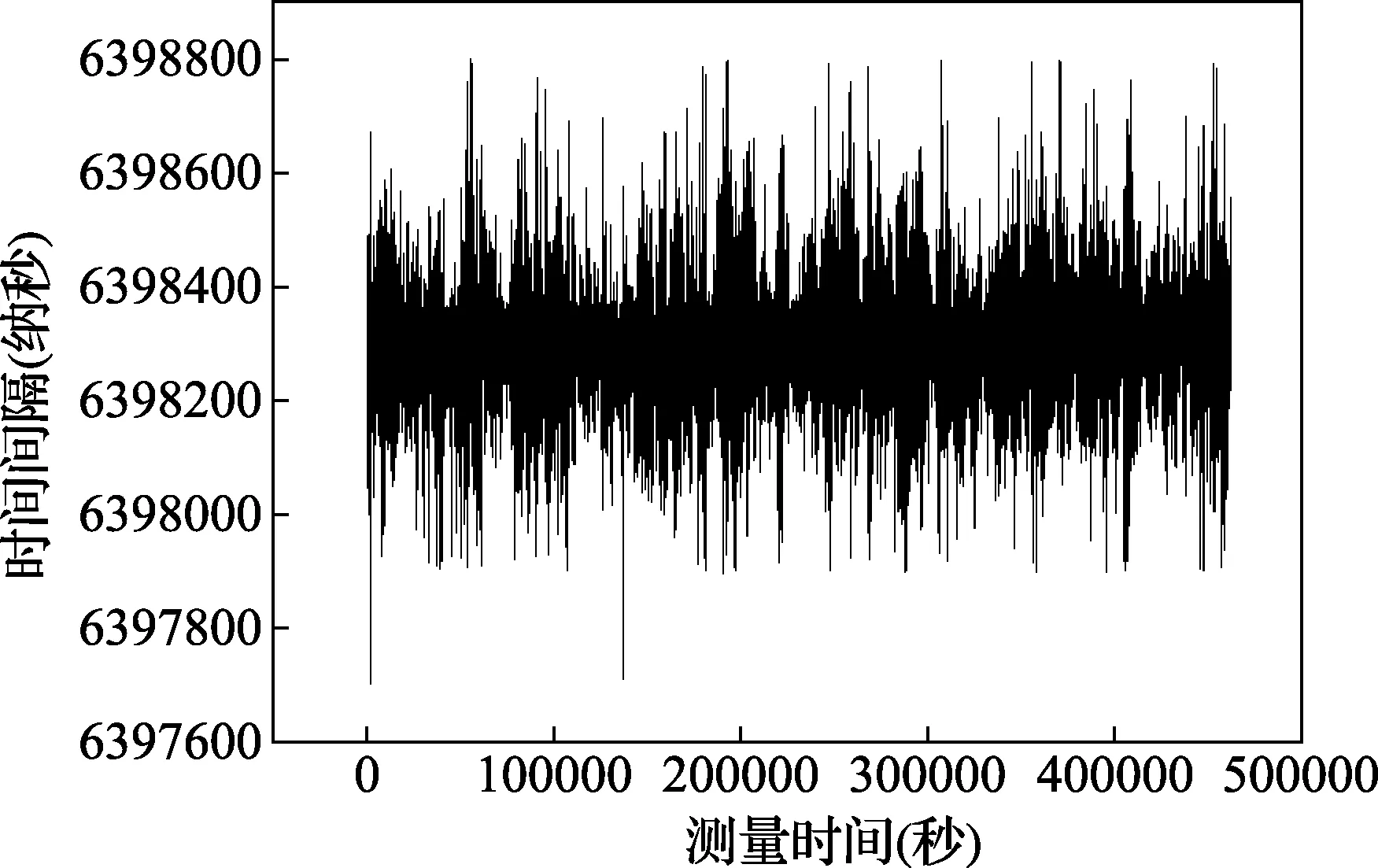
图1 BD2和铯钟5071的1PPS相位差实测结果
从图1中可以看到,北斗接收机的输出秒脉冲相对于5071s脉冲并不是稳定不变的,而是一个抖动量,这主要由大气层延迟、多普勒效应和多路径效应以及接收机解调噪声等因素影响,其抖动量大小介于-300~300ns,连续进行5天近120min的测试,其秒脉冲相位特性基本保持不变,没有明显的向前或向后的偏移,即尽管秒脉冲前沿有抖动跳变,但长期无漂移,长时间的平均值还是在0附近。
图2所示为秒脉冲前沿抖动量大小的频度概率分布图,秒脉冲误差的概率分布图近似为正态分布曲线,其统计平均值约为1ns,统计标准差为33ns,与厂家提供的指标完全一致,这些曲线说明了BD-2接收机授时信号确实有很高的定时准确度,而且无累积漂移,但秒脉冲的前沿的跳动较大。对于许多授时、定时应用1μs误差完全能满足定时应用的要求。但在驯服铷钟和校频领域应用,如果直接用秒脉冲来校准铷钟的频率,则只能达到3×10-9的频率稳定度,大大降低铷钟本身的短稳性能,因此,必须采用合适的频率偏差计算方法和良好的本地铷钟的控制方法,准确解算本地铷钟和星载原子钟频率偏差,实现本地铷钟精密稳定控制,才能达到驯服效果。

图2 BD-2和铯钟5071的1PPS相位差统计分析
2 北斗驯服铷钟技术方案及工作原理
北斗驯服铷钟技术方案框图如图3所示。

图3 北斗驯服铷钟结构框图
基于BD-2系统的驯服铷钟频率标准主要由接收天线、WBG12+OEM北斗接收机板、LPRO101铷钟、精密时间间隔测量模块、精密电压产生与控制模块、控制器及驯服铷钟控制软件等部分组成。接收机接收卫星导航电文信息,解调后控制产生1PPS或100PPS的定时脉冲信号,导航电文信息、卫星状态和接收机工作状态的监控信息通过RS232串口输出,由微处理器接收识别,并对驯服过程进行控制。
由于TDC芯片的最大时间间隔测量为200ms,必须对铷钟输出进行分频至大于5Hz,设计中设定为100Hz。北斗接收机输出的1PPS秒信号作为TDC鉴相单元起始脉冲,铷钟输出10MHz信号经过105分频后产生的100PPS信号作为TDC鉴相单元停止脉冲,铷钟输出10MHz信号作为TDC参考时钟。由TDC鉴相单元测量起始和停止脉冲的时间间隔,微处理器单元计算出两信号的相对频率偏差,根据铷钟调控电压和频率偏移量的关系,控制高分辨率精密模数转换单元输出铷钟控制电压,调整铷钟的输出信号的频率,使铷钟与北斗接收机的1PPS脉冲统计平均频率保持一致,从而实现铷钟驯服。
3 关键技术研究与设计
3.1 数据滤波与数据处理方法
针对接收机定时信号抖动,有多种数据滤波处理方法,如Kalman滤波、Vandrak方法等等,主要解决的技术问题是在一定的条件下,例如数据处理速度、数据量大小、内存占用等条件约束下,对两个信号的频率偏差进行稳定有效检测。在设计中采用ARM结构的STM32F103VE微处理器,内部有64k字节数据存储器,系统工作时钟为72MHz。BD-2接收机输出秒信号的抖动量为100~200ns,如果要达到10-12的控制分辨率,不仅对D/A转换器的分辨率要求较高,对于数据平滑滤波处理的要求也较高。
本文设计了算术平均、滑动平均组合滤波算法和最小二乘法拟合求解频率偏差。由TDC测量得到的两个信号的时间间隔数据,进行算术平均预处理,系统采样次数为100次,即算术平均的输出抖动量减小10倍。对算术平均输出的数据进入数据缓冲区,采用滑动平均滤波方法,算术平均输出序列为:A(WNUM),滑动平滑窗口大小为WNUM,当采样点数n小于WNUM时,滑动滤波输出为:
(2)
当n大于WNUM时:
(3)
对平滑窗口内数据采用最小二乘线性拟合,按下式计算,实现相对频率偏差的检测:
(4)
3.2 铷钟频率控制方法
铷钟的控制在开始阶段和正常驯服阶段其特性有很大不同,第一阶段,主要是频率校准过程,根据与BD-2信号测量结果,对铷钟的频率进行校准,使铷钟输出频率接近其标称频率。第二阶段,当铷钟的频率非常接近其标称频率达到2×10-11时,开始引入比例积分PI调节,开始驯服控制过程。铷钟从开机到自身输出稳定,需要5~10min时间,并且,其频率输出与标称频率差别较大,如果在铷钟自身输出锁定后立刻开始采用数据平滑滤波和最小二乘法拟合进行数据处理,由于两者偏差较大,将大大延长实际驯服过程,采用分两个阶段的驯服控制过程可以缩短驯服过程。
在铷钟校准后的频率准确度达到2×10-11后,铷钟与BD-2平均频率偏差很小,调整量也非常小。因此,在不同的控制阶段,铷钟的控制策略也是不同的。同时,驯服过程并不是要求铷钟的频率实时跟踪于GPS的频率,而是缓慢调整跟踪到BD-2在一定时间内频率的平均值上,在驯服过程中,铷钟控制电压的算法引入了非常强的积分效果。
在开机后,BD-2首先寻找并跟踪卫星,铷钟自身经过预热,其内部锁相环锁定,这时其频率准确度为10-10左右。两者频率偏差的计算通过固定采样点数直接计算,采样过程中并不对铷钟进行控制调整,仅在一个采样周期采样结束后,根据测量数据进行最小二乘法拟合出的频率偏差结果进行调整,采样为100点,可以控制铷钟频率准确度进入10-10,然后增加采样点数为500点,可以控制铷钟频率准确度进入2×10-11。然后,引入数据平均、滑动平均滤波和最小二乘法计算频率偏差。
实际控制算法如下:
第一步:铷钟频率快速校正:
Vn+1=Vn+k1×ΔA( |ΔA| >10-10T=100s)
Vn+1=Vn+k2×ΔA( |ΔA| >2×10-11T=500s)
式中:k1、k2电压频率调整灵敏度系数;Vn+1本次调整电压的数字量;Vn前一次调整电压的数字量;T采样周期;ΔA是最小二乘法拟合输出的相对频率偏差。
第二步:铷钟自动跟踪驯服:
Vn+1=Vn+k3×ΔA1+k4×ΔA2
(5)
式中,k3、k4是电压频率调整灵敏度系数;ΔA1是100s采样周期拟合输出相对频率偏差;ΔA2是1000s采样周期拟合输出相对频率偏差。
4 驯服结果分析
BD-2驯服铷频标实测结果如表1所示,驯服锁定后,其频率准确度和稳定性均得到了大幅提高,并且,其短稳特性没有因为驯服过程引起太大变化,接近铯原子频率标准性能。
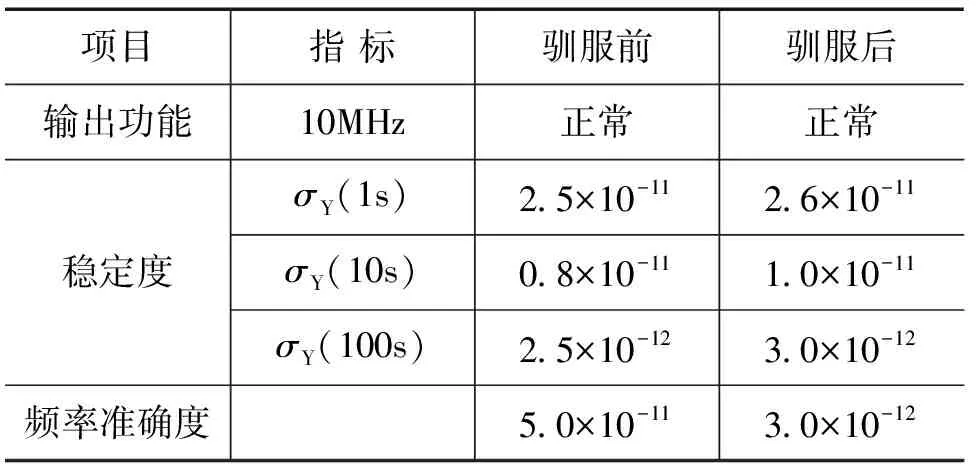
表1 输出性能测试结果
5 结论
该系统结构简洁,体积小巧,技术性能优异,特别是数据滤波算法和铷钟控制算法,与其他方法相比,具有电路简单实用,滤波算法数据存储量、计算量小,易于采用单片机等嵌入式系统实现。基于BD-2和TDC技术的铷钟驯服频率标准,实现了高精度时间频率标准信号的输出控制,使铷钟技术性能得到了很大提高,不仅可以作为高性能频率源应用于设备、仪器内部,也可作为计量校准标准设备使用,或者作为各级计量技术机构铯原子频标核查装置,具有较强推广价值。
[1]高小珣,高源. GPS共视法远距时间频率传递技术研究[J]. 计量学报,2008,29(1)
[2]梁坤,王伟波,宁大愚. GPS载波相位时间频率传递研究[J]. 计量学报,2010,31(1)
[3]刘烈昭,周东明,李忠华. GPS时间频率标准研制[J]. 宇航计测技术,1997,17(1)
[4]孟庆杰,徐建芬,姜雪松. GPS基频率标准的计量校准[J]. 宇航计测技术. 2007,27(5)
[5]侯同强,刘峰.采用GPS对铷原子频标进行校频[J].飞行器测控学报,2007,26(4)
[6]曾亮,孟庆杰,徐伟. 利用GPS驯服校频技术提高晶振性能[J]. 计量技术,2008(5)
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
娃娃乐园·综合智能(2020年10期)2020-11-10
当代陕西(2019年18期)2019-10-17
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
动漫星空(2018年5期)2018-10-26
小哥白尼(军事科学)(2018年8期)2018-09-12
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
太空探索(2016年12期)2016-07-18