
基于三轴GMR传感器的无线车位检测系统
2014-03-22 01:50邹初建钱正洪朱礼尧吕海洋张星波
仪表技术与传感器 2014年9期
邹初建,钱正洪,白 茹,朱礼尧,刘 洋,吕海洋,张星波
(杭州电子科技大学磁电子中心,浙江杭州 310018)
0 引言
随着经济的快速发展,汽车数量急剧增长,交通需求[1]方面的问题日益增加,尤其是停车场中车位的数量越来越不能满足停车的需要,如何高效快捷地停车成了人们日常出行必须考虑的问题。传统的办法是修建或扩建大量的停车场,增加停车位的数量,但是随着人口的增长,人均居住面积的日益减少,可供修建或扩建的空间越来越少,如何对车位进行有效的管理是迫切需要解决的问题。
目前,国际上比较常用的车位检测方法[2]有超声波检测、红外线检测、视频检测、感应线圈检测和地磁检测。超声波检测的成本低、体积小、易于安装和使用寿命长,但它性能受温度影响;红外线检测的成本低、反应快、能精确测量车辆的速度和型号,但它的性能受天气变化影响;视频检测能提供大量的图像数据,但它成本高、安装高度和性能受环境影响;感应线圈检测的适用范围广、技术成熟、抗干扰性强,但它安装和维护比较麻烦,影响路面寿命,易被车辆损坏。而地磁检测是一种新型的车位检测方法,它的优点是体积小、功耗低和灵敏度高,同时非常适合于露天场合和恶劣天气对车位进行检测。
文中基于GMR传感器和ZigBee无线传感器网络技术[3],研制一种无线车位进行系统,该车位检测节点具有低成本、低功耗、小体积和性能好的优点,同时受环境影响小、电路结构简单、对路面的破坏性小、易于使用,可广泛应用于车位检测,有助于提高车位的利用率,缓解停车难的困境。
1 硬件设计
车位检测节点[4]是车位检测系统中最重要的部分,它主要负责对信号的采集、处理和传输,主要由数据采集模块、电源管理模块和RF收发模块组成,它的硬件框图如图1所示。

图1 车位检测节点硬件框图
为了提高车位检测节点的灵敏度和降低它的功耗,需要对数据采集模块和电源管理模块的设计有更高的要求,以下就是2个模块的介绍。
1.1数据采集模块
数据采集模块内部包括GMR传感器、放大电路和滤波电路,它的电路原理图如图2所示。
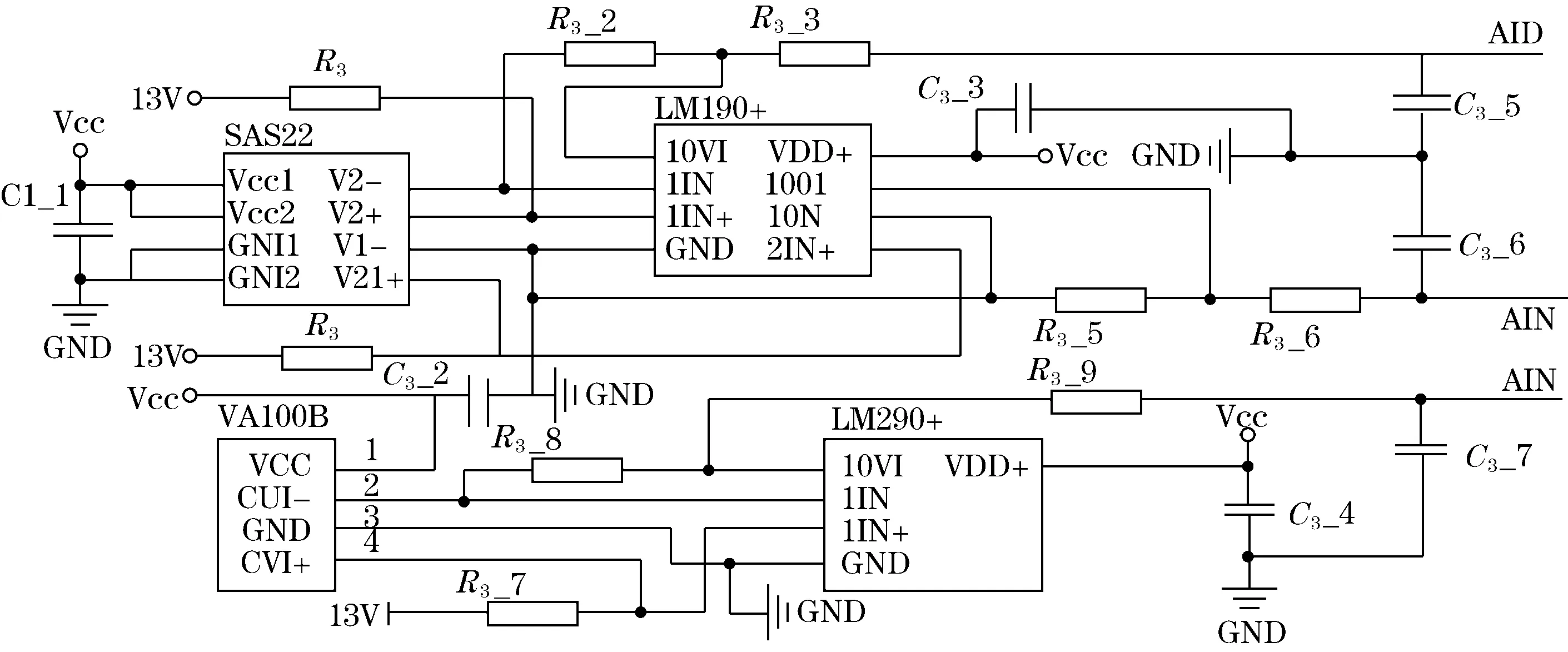
图2 数据采集模块电路原理图
GMR传感器是数据采集模块最重要的部分,为了增加车位判断的准确度,由单轴SAS03-1自旋阀传感器变为由双轴SAS022-1和单轴VA100F3自旋阀巨磁阻传感器组合而成的三轴GMR传感器,通过对3个相互垂直的方向上磁场的测量来更准确进行车位检测。双轴SAS022-1传感器测量范围在±3 Gauss、灵敏度为4.1 mV/V/Oe,具有对恶劣环境的适应性强、灵敏度高、寿命长等优点[5]。
GMR传感器输出的信号是mV级别的,需要对该输出信号进行放大100倍。放大芯片采用LM2904的低功耗双运算放大器,同时需对放大的信号滤波[6],滤除信号中频率较高的成分。
1.2电源管理模块
采用两节5号碱性电池供电,提高了便携性,但是该电池电量有限、拆装不方便、增加节点的体积,不利于大规模的使用,该研究采用3.7 V、标准容量1 100 mA/h的聚合物锂电池[7]供电,它具有安全性能好、厚度薄、重量轻、容量大、内阻小等特点。在使用锂电池时,为了避免过充电、过放电、过电流和短路的影响,设计采用8205A和DW01芯片组合完成保护电路,它们内置高精度的电压检测电路和时间延迟电路。
车辆对地磁的扰动大约在200 mGs[8],系统电路需要3.3 V电压,而锂电池提供的电压是3.7 V,需要采用TPS63001芯片实现电压转换。
2 软件设计
数据采集后,需要传输给处理节点进行分析,它们之间的通信需要采集ZigBee传感器网络技术。不仅需要两个节点间的通信,还需要利用ZigBee自身的特点组建小型的传输网络。
2.1ZigBee技术
ZigBee[9-11]是一种短距离、低复杂度、低功耗、低速率和低成本的双向无线网络技术,也是一种基于IEEE 802.15.4无线标准研制开发的有关组网、安全和应用软件方面的通信技术。
ZStack是基于ZigBee技术的半开源协议栈,为用户提供3个可供免费下载和修改使用的程序包Simple App、Generic App和Sample App;它是基于优先轮转查询式操作系统,定义了物理层、媒体介质访问层、网络层和应用层,用户可以根据应用特点修改应用层代码来满足自身的要求。该研究使用协调器、路由器和终端设备3种设备类型,采用树型拓扑的ZigBee网络,选择ZStack协议栈中Simple App程序包修改。
2.2节点工作流程
ZigBee协调器节点负责启动整个网络,是网络中的第一个设备。它的工作流程如图3(a)所示。首先启动并初始化程序,包括串口初始化;接着选择一个信道和网络ID,并启动整个网络;随后允许设备绑定和处理绑定请求并发送绑定响应;之后处于等待数据的接收,当接到数据时,就判定数据的类型,如果是串口数据则通过广播发送给相应车位检测节点,如果是绑定数据则通过串口传输给PC.
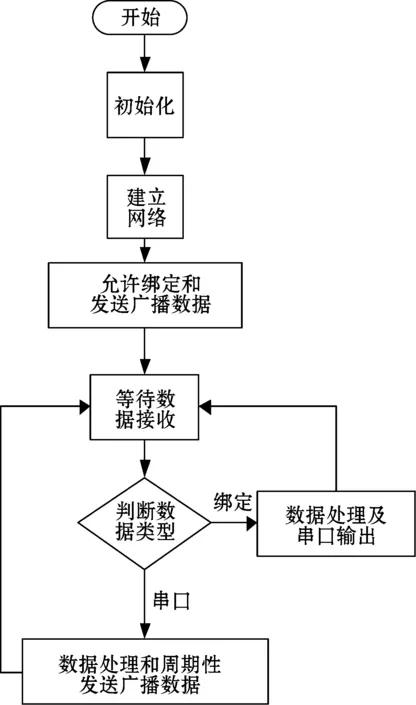
(a)协调器节点

(b)路由器节点
ZigBee路由器节点作为中介完成协调器和终端节点间通信,实现路由通信的功能,它的工作流程如图3(b)所示。首先启动并初始化程序;接着加入网络,发送绑定请求和接收并处理绑定响应,同时开始接收广播数据;在绑定成功后,周期性获取父子节点的网络短地址,并通过绑定的通信方式发送信息给协调器节点。
ZigBee车位检测节点没有特定的维持网络的责任,它可以睡眠或者唤醒,可以是一个电池供电设备,它的工作流程如图4所示。首先启动并初始化程序;接着加入网络,发送绑定请求和接收并处理绑定响应,同时开始接收广播数据;在绑定成功后,设置睡眠定时器并进入睡眠状态,当睡眠停止时,开始判断是否接收到广播数据,如果接收到广播数据,判断数据类型,相应进行手动校准、获取基准值或调整采样频率操作,否则直接进行数据采集、获取父子节点网络短地址和绑定发送信息。
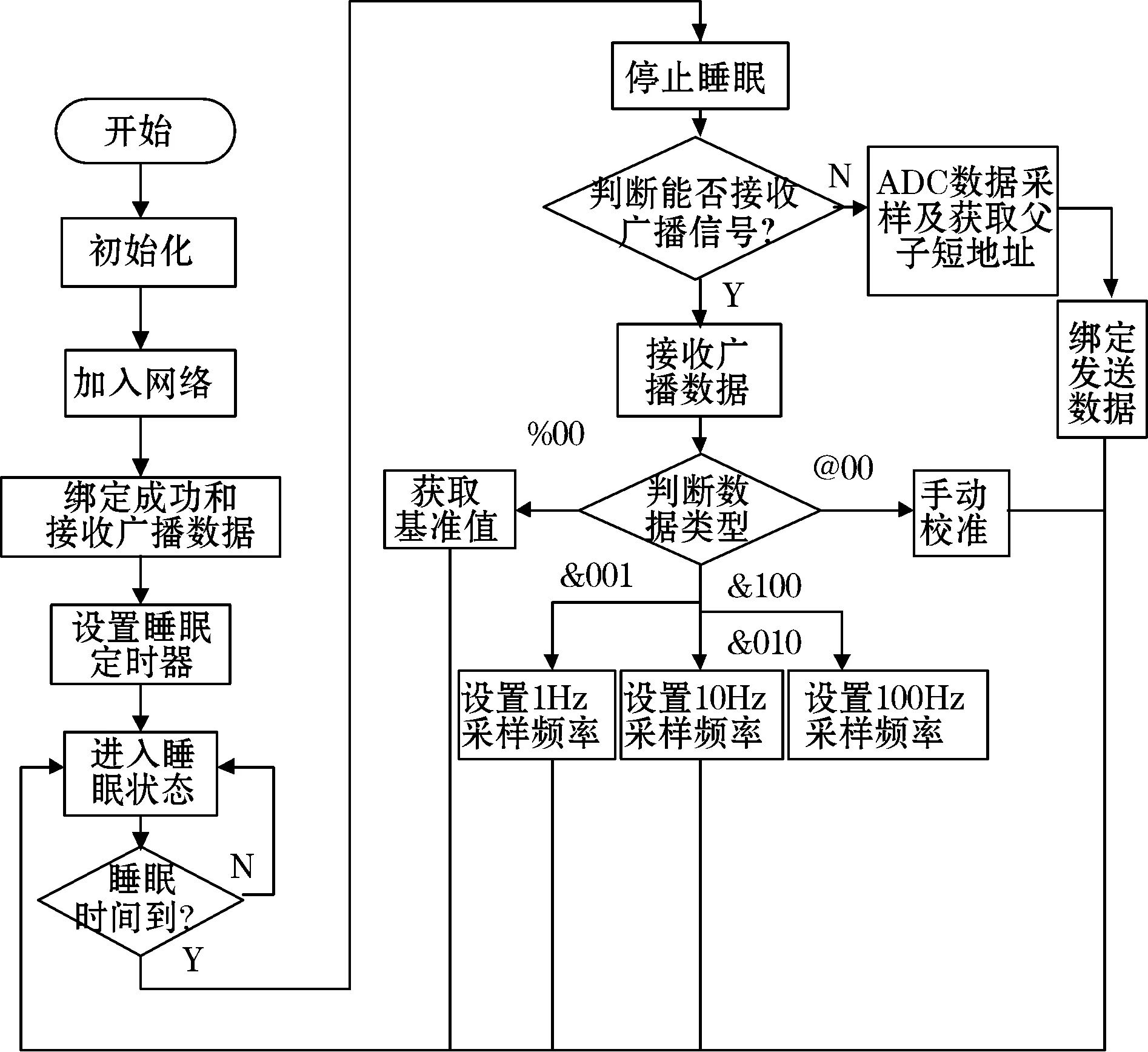
图4 车位检测节点工作流程
3 实验与分析
如何对车位进行有效的检测,关键是车位检测节点放置的位置。一般方法是将车位检测节点放置在车辆底部不同位置来测量其输出电压值,测量的输出电压反应了磁场的分布进而确定车位检测节点放置的位置。该方法需要对整个车辆底部进行检测,并绘制整个车位磁场分布,这种做法工作量大且车辆有些部分对地磁的扰动不大,所以文中对车位检测实验方法进行改进,使其更符合实际需要。
首先,对车辆结构进行分析,由于车辆是铁磁性物体,相对与其他位置,车轮和发动机中含有大量的铁镍合金,它们对地磁有较大的影响,所以只需要沿着左车轮轴、中轴(发动机部分)和右车轮轴3个方向,从前到后按特定距离(50 cm)放置车位检测节点并测量其输出电压值。
其次,车辆的不同朝向,所形成对地磁的扰动也不同,需要对不同朝向车位地磁强度进行测量。
最后,加入在车位没有车辆存在时对GMR传感器输出电压值进行校准和定时获取基准值的步骤,目的是提高车位判定的准确度。
3.1校准状态下车位磁场分布
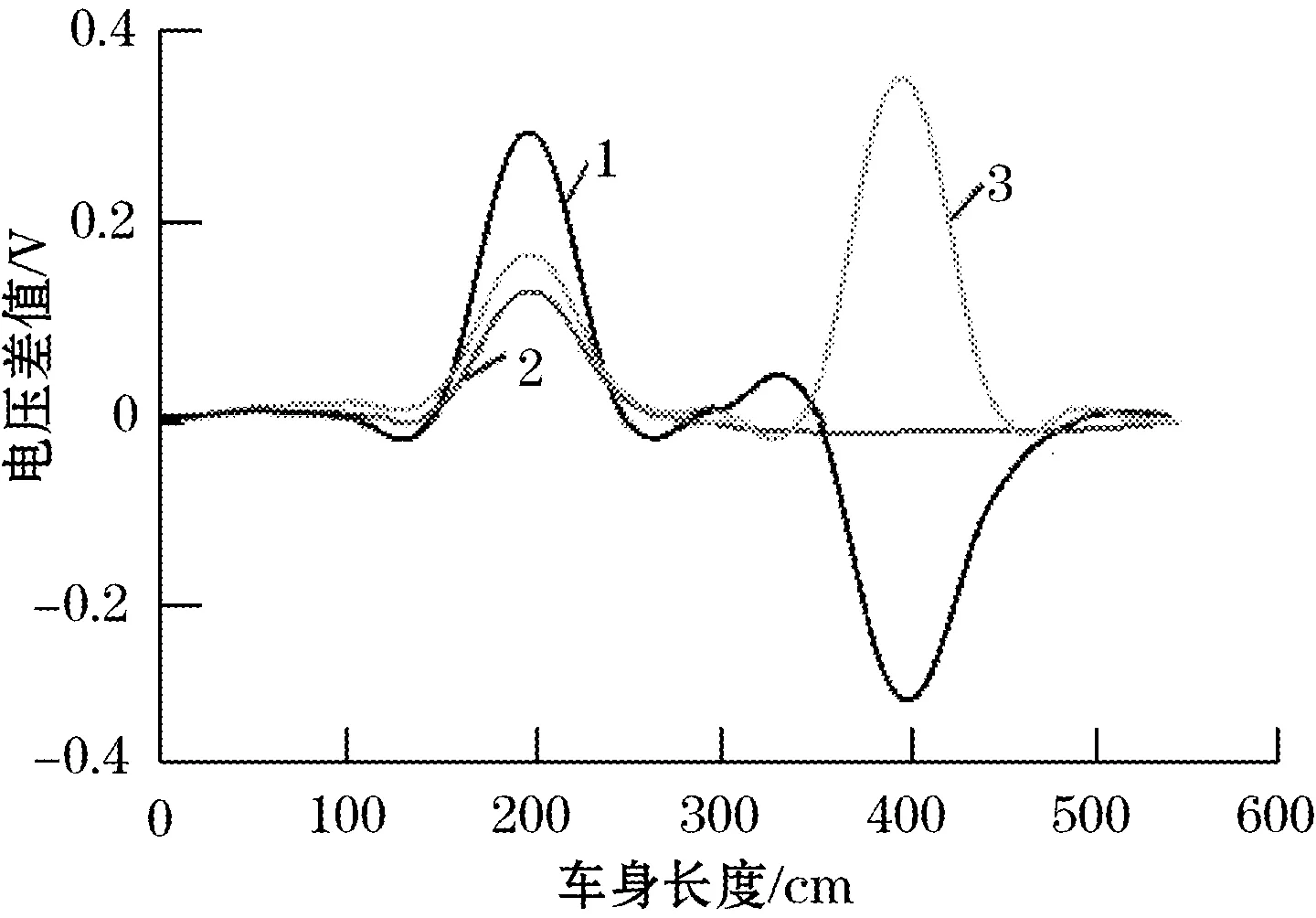
选取东西朝向的车位进行实验,当该车位没有车辆存在且在校准状态下测得车位检测节点的GMR传感器输出电压值。当该车位停有一头朝东尾朝西的某型号车辆时,在校准的状态下测得左车轮轴、中轴和右车轮轴3个方向车位检测节点的输出电压值。通过该车位在有无车辆存在时,对车位检测节点的GMR传感器输出电压进行比较,得到在校准状态下,东西朝向车辆在X、Y和Z轴由车辆所引起的电压差值分布如图5所示。
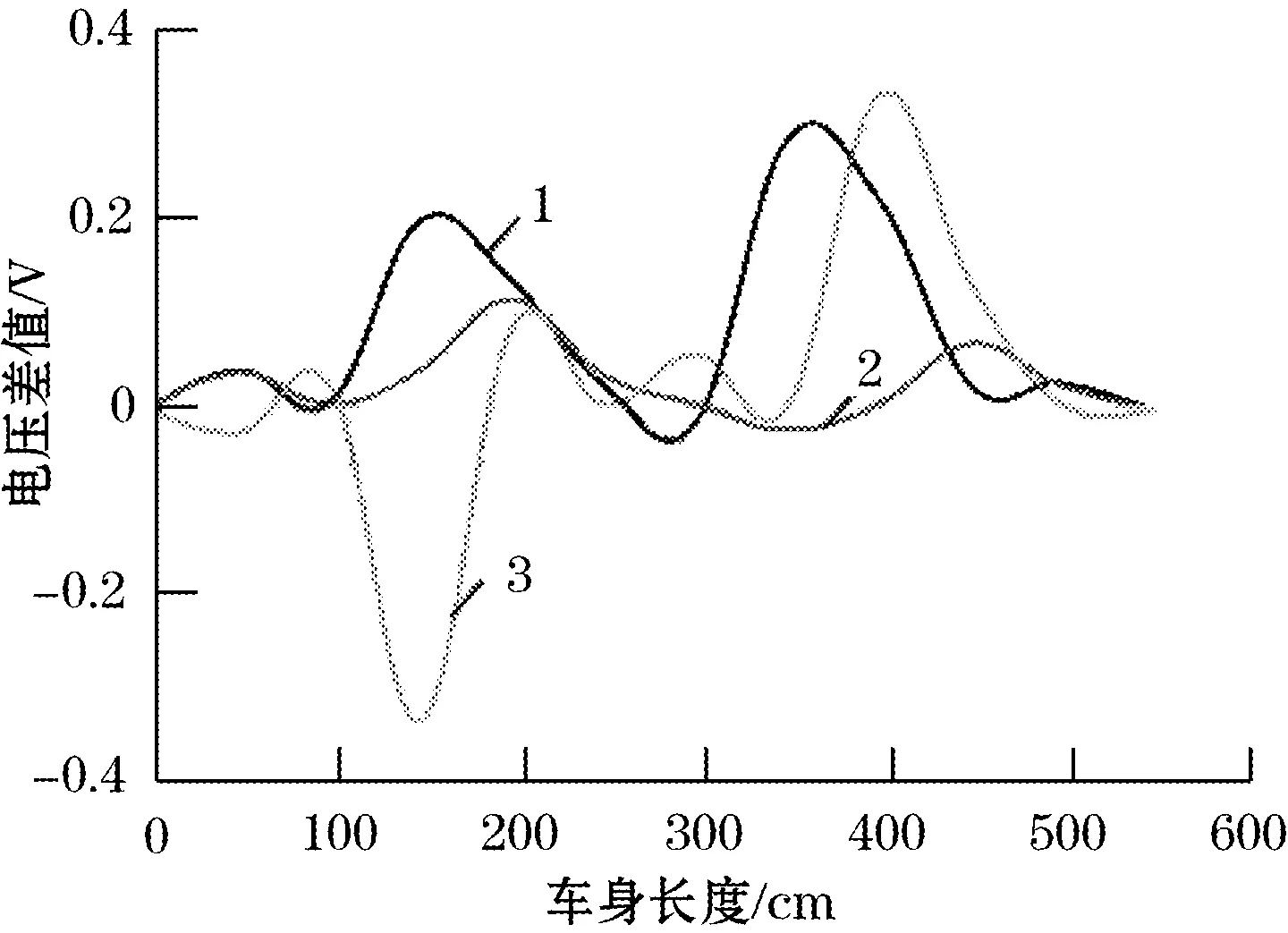
1—左半车轮轴;2—中轴;3—右半车轮轴(a)东西朝向车辆X轴电压差值分布

1—左半车轮轴;2—中轴;3—右半车轮轴(b)东西朝向车辆Y轴电压差值分布
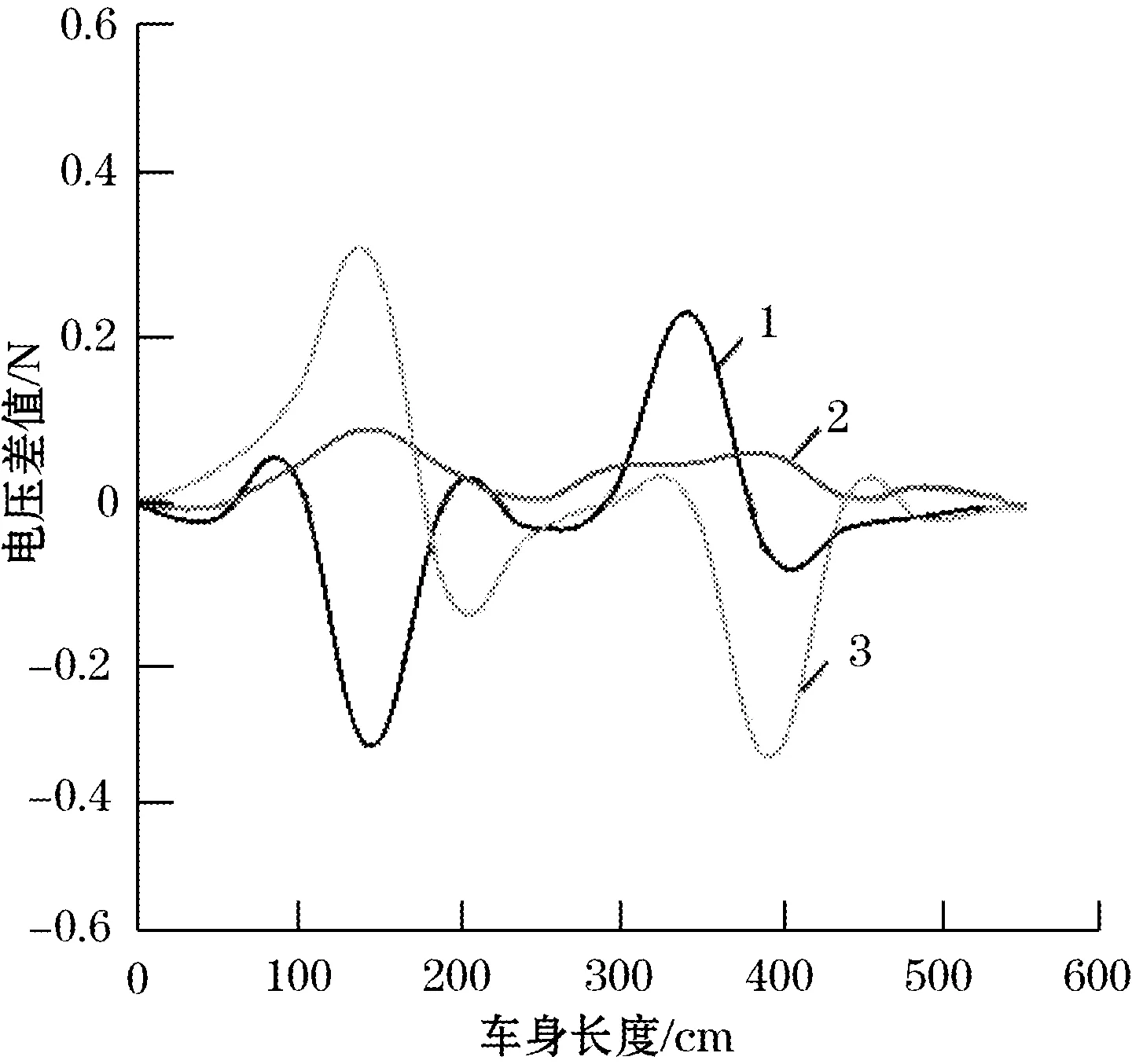
1—左半车轮轴;2—中轴;3—右半车轮轴(c)东西朝向车辆Z轴电压差值分布
从图5中可以看出,当车位上没有车辆存在时,GMR传感器的X、Y和Z轴输出电压值没有变化;当车位检测节点远离车辆时,X、Y和Z轴输出电压值也不会发生变化;当车位检测节点靠近车辆时,X、Y和Z轴输出电压值有较明显的变化;当车位检测节点分别位于前后4个车轮下时,由于车轮含有铁镍合金,对地磁有较大的影响,所以,X、Y和Z轴输出电压值有较大的变化,它们的输出电压值变化幅度平均在0.2 V及其以上;当车位检测节点位于发动机下时,因发动机由大量的铸铁和铝合金构成,对地磁也有一定的影响,它的输出电压值有一定的影响;最后,当车位检测节点位于车辆的其他位置时,X、Y和Z轴输出电压值的变化幅度将不那么明显,大约在0.1 V范围内。
选取南北朝向的车位进行实验,它的方法和南北朝向的车位实验一样。在校准状态下,南北朝向车辆在X、Y和Z轴电压差值分布如图6所示。
1—左半车轮轴;2—中轴;3—右半车轮轴(a)南北朝向车辆X轴电压差值分布
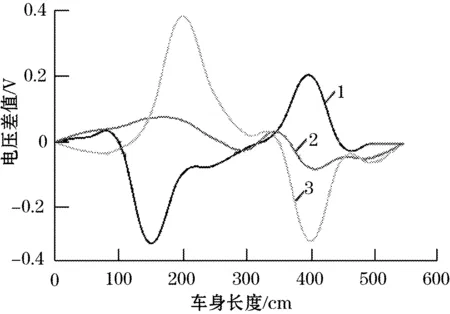
1—左半车轮轴;2—中轴;3—右半车轮轴(b)南北朝向车辆Y轴电压差值分布

1—左半车轮轴;2—中轴;3—右半车轮轴(c)南北朝向车辆Z轴电压差值分布
从图6中也可以看出,在校准状态下,车位检测节点测量南北朝向车辆,在X、Y和Z轴电压差值分布与东西朝向车辆的变化类同。
3.2车位判定
从校准状态下车辆电压差值分布图5和图6得出,无论在X、Y和Z轴,电压差值在四个车轮位置变化都很大,在发动机位置有一定的变化,而在其他位置变化很小。如果把车位检测节点放置在车轮位置附近,车辆在车位进行停放时会对其造成损坏,因此不利于长久的使用。所以,把车位检测节点放置在发动机位置附近,车辆中轴方向在发动机位置附近的变化幅度明显大于其他位置,它的电压差值统计表如表1所示。
把车位检测节点放置在发动机位置附近,通过建立合适的阈值,滤掉旁边车位的车辆或更远距离的车辆带来的干扰,来判断阈值和电压差值(该时刻车位检测节点测量输出电压值与基准值之差)间的关系确定该车位是否有车辆存在,为了提高车位判定的准确度,它们之间的关系需要通过大量的实验去完善,以满足不同条件下的车位判定。
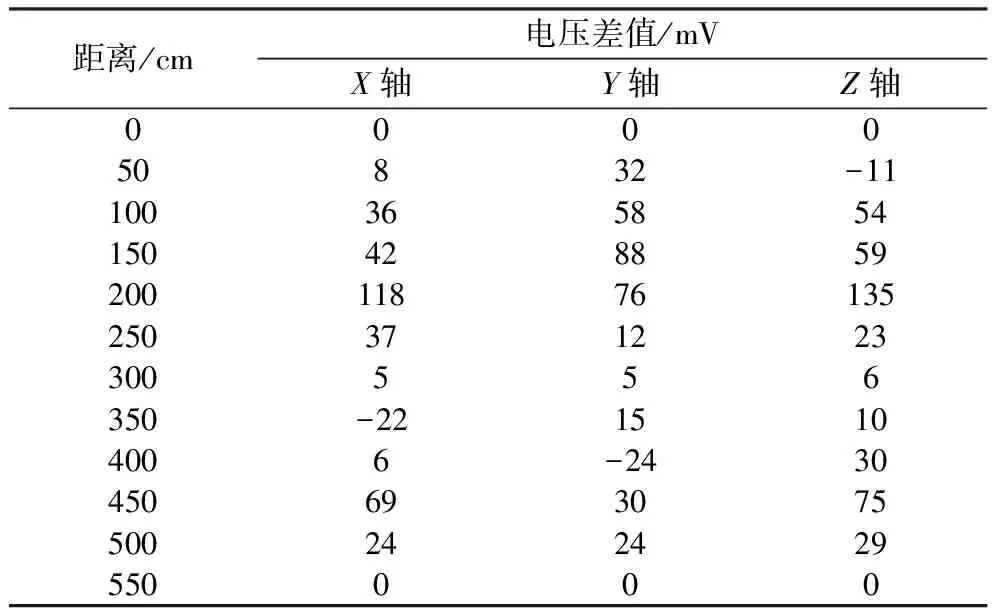
表1 车辆中轴方向电压差值统计表
4 结束语
传统的车位检测方法在成本、功耗、体积和性能上达不到统一,而文中是基于三轴GMR传感器和ZigBee无线传感器网络技术研制的无线车位检测系统,使其具有低成本、低功耗、小体积和性能好的特点,很好的在成本、功耗、体积和性能上达到了统一。可广泛在停车场对车位的管理、流量的控制和车辆的管理中应用。但系统网络的拓扑结构还需要改进,车位检测的准确度还需要提高[12]。
参考文献:
[1]鲍晓东,张仙妮.智能交通系统的现状及发展.道路交通与安全,2006(8):15-18.
[2]彭春华,刘建业.车辆检测传感器综述.传感器与微系统,2007,26(6):29-31.
[3]张星波,钱正洪,白茹,等.基于磁阻传感器的无线车位探测器.机电工程,2012,29(12).
[4]SIFUENTES E,CASAS O,PALLAS-ARENY R.Wireless Magnetic Sensor Node for Vehicle Detection With Optical Wake-Up.Sensor Journal,IEEE,2011,11(8):1669-1676.
[5]钱正洪,白茹,黄春奎,等.先进磁电子材料和器件.仪表技术与传感器,2009(11):96-101.
[6]桂静宜.二阶有源低通滤波器电路的设计与分析.电子科技,2010,23(10):15-17.
[7]黄可龙,王兆翔,刘素琴.锂电池原理与关键技术.北京:化学工业出版社,2008.
[8]马飞.基于ARM传感器的车辆检测系统设计:[学位论文].太原:太原理工大学,2011.
[9]朱红松,孙利民.无线传感器网络技术发展现状.中兴通讯技术,2009(5):1-5.
[10]成小良,邓志东.基于ZigBee规范构建大规模无线传感器网络.通信学报,2008(11):158-164.
[11]王东,张金荣,魏延,等.利用ZigBee技术构建无线传感器网络.重庆大学学报(自然科学版),2006(8):95-97.
[12]吕海洋,钱正洪,白茹,等.基于GMR传感器的ZigBee无线车辆检测系统设计.传感器与微系统,2013,32(3).
猜你喜欢
气象水文海洋仪器(2021年4期)2021-12-11
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
现代家长(2018年11期)2018-01-05
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中成药(2017年6期)2017-06-13
发明与创新·中学生(2016年7期)2016-05-14
中国钢铁业(2012年11期)2012-08-22
