地铁隧道变形监测仪器视觉检测系统标定
2014-03-22 00:42朱海涛熊肖磊张根雷屈剑平
仪表技术与传感器 2014年8期
赵 炯,朱海涛,熊肖磊,张根雷,屈剑平
(同济大学机械与能源工程学院机械电子研究所,上海 201804)
1 视觉检测系统
1.1工作原理概述
监测仪器工作原理如图1所示。监测仪器安装在隧道沿线管壁上,每5 m布1个监测节点,组成传感器网络,对隧道相临断面相对变形位移进行检测。隧道管壁上的监测仪器为相邻节点提供光源,并采用摄像机对自身前方光源进行间歇性拍摄,获取光源图像,通过图像处理,获取光源中心位置信息,通过对比前后两次所获取的中心位置数据,获得光源所在节点和拍摄节点之间的相对偏移量,再利用比例系数对数据进行比例调整,即获得实际相对变形量。
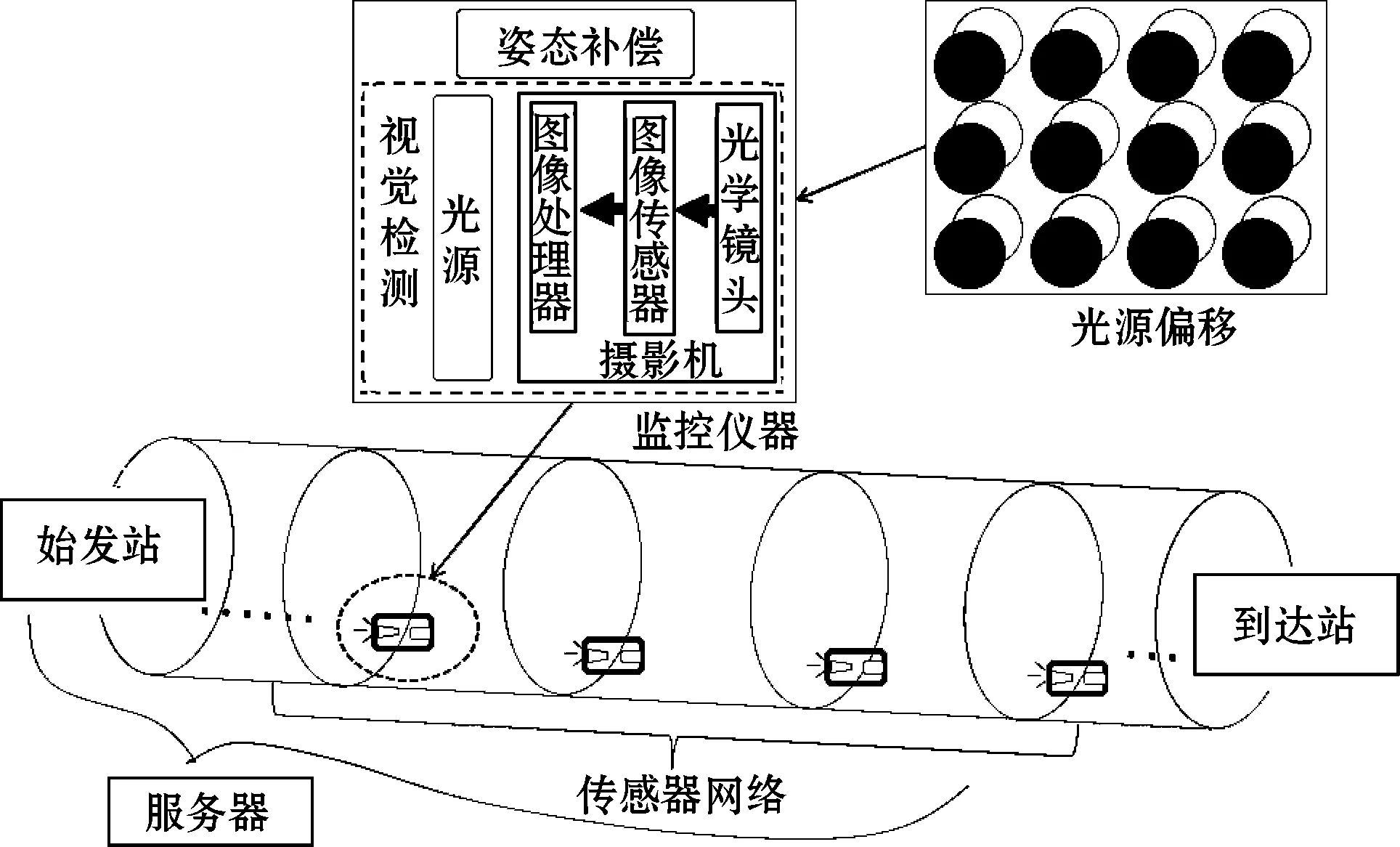
图1 监测仪器工作原理图
1.2检测精度分析
监测仪器的检测精度为5 m水准测量中误差不超过0.2 mm[1]。如图1所示,监测仪器由视觉检测系统和姿态补偿系统组成。由于摄像机在安装过程中和隧道变形过程中会产生微小空间转角,监测仪器利用姿态补偿系统测出该转角并进行角度补偿,因此监测仪器的检测精度由视觉检测系统和姿态补偿系统共同决定,视觉检测系统的检测精度要小于监测仪器的检测精度。
1.3影响因素分析
图像传感器生产工艺和材料结构的非均匀性,为图像引入了固定模式噪声,表现出暗电流和光电响应的非均匀性,使各像素对于相同辐照度产生的灰度值并不相同,甚至有较大差异,从而不能真实反映光源的实际情况。
光学镜头固有的畸变特性,为图像引入了失真,其外在表现是所拍摄图像不能够真实反映现实拍摄场景,其内在机理表现为所拍摄实际图像中的像素坐标与理想图像中的像素坐标不能一一对应。
图像传感器在监测仪器安装过程中会产生相对于水平面的倾斜角,使图像光源中心在Y方向上的坐标偏移量与空间铅垂方向上的偏移量并不相等。
光源的照明特性,包括光源的形状,光照的强度、稳定性和均匀性。如果光源形状单一,则像素利用率降低,检测灵敏度下降,从而降低计算精度;如果光照不稳定、不均匀,则图像边缘特征模糊,拟合效果差,从而也会降低计算精度。
针对图像传感器的非均匀性引起的像素灰度值差异、光学镜头的畸变特性引起的像素坐标值失真、图像传感器的水平倾斜角引起的偏移量测量误差和光源的照明特性引起的计算精度降低,设计适用于地铁隧道变形监测仪器视觉检测系统的标定方法,分别对图像灰度值、摄像机内参数和摄像机外参数进行标定。
2 标定方法设计
2.1图像灰度值标定
图像传感器像素响应函数可近似认为是线性的[2],即:
yi=aix+bi
(1)
式中:x为输入辐照度;yi为第i个像素输出灰度值;ai反映第i个像素光电响应的非均匀性;bi反映第i个像素暗电流的非均匀性。
在均匀辐照度下,由于图像传感器的非均匀性,各像素的ai和bi并不相同,从而导致各像素灰度值大小也不相同。图像灰度值标定的关键是精确地求出各像素的ai和bi.但是由于输入辐照度的值难以精确测量,因此,在均匀辐照度下,对整幅图像做平均处理:
(2)
(3)

2.2摄像机内参数标定
摄像机几何模型和透镜的畸变模型,定义了摄像机的内参数,包括像素焦距(fx,fy),主点坐标(uo,vo),径向畸变系数(k1,k2)和切向畸变系数(k3,k4)。摄像机内参数的求取采用Camera Calibration Toolbox for Matlab[3]。摄像机内参数标定实际上就是对一幅畸变图像进行恢复的过程。
首先,将像素坐标(i,j)转换成图像平面坐标系的物理坐标(x,y):
(4)
考虑光学镜头的径向畸变和切向畸变,重新计算图像平面坐标系的物理坐标(xd,yd):
(5)
式中:r2=x2+y2。
最后,把标定后的图像平面坐标系的物理坐标转换回像素坐标(u,v):
(6)
若没有对应像素坐标,可利用差值法重建像素新值。
2.3摄像机外参数标定
摄像机外参数是连接摄像机坐标系和世界坐标系关系的桥梁,由旋转矩阵R,平移向量T和比例系数K组成。摄像机外参数标定实际上就是对计算偏移量进行比例调整,从而获得实际相对变形量的过程。
首先,将摄像机坐标(x,y)转换成空间水平铅垂坐标(x′,y′)。设θ为图像传感器相对于水平面的倾斜角,转换模型由旋转矩阵R和平移向量T定义:
(7)

然后,计算比例系数K.比例系数K的计算精度受光源照明特性影响,因此可通过优化光源设计提高比例系数K的计算精度。
光源形状采用复杂图形,可实现自动标定技术并提高图像像素利用率。由于最终得到的是光源几何中心坐标,光源的几何形状在整体上应具有良好的对称性,在设计光源形状时考虑设计成圆或矩形。通过实验发现圆形光源比矩形光源边界更清晰,目标特征更容易提取,且受到畸变和失真的影响也较微弱。但若光源形状为单一的圆,在拍摄图像时由于光线昏暗导致光源边缘模糊不清,图像处理无法得到准确的半径值,计算结果误差较大。针对单一的圆无法准确自动标定这一问题,将光源设计为12个小圆呈3×4矩形排列,并采用LED点阵作为背光,形成具有较大对比度的黑白图像。
已知光源的任意2个圆的空间中心距为1,通过圆心定位[4]得到这2个圆的圆心坐标分别为(X1,Y1)和(X2,Y2)。根据两圆的圆心坐标计算出图像中心距a:
(8)
计算比例系数K:
(9)

(10)
(11)

(12)
此外,光照强度、稳定性和均匀性也间接影响着比例系数的计算精度。标定过程中,一方面,自动控制光照强度,优化曝光时间,使不同位置光照强度一致,可获得较高信噪比;另一方面,保持光源辐照度恒定或光源变化频率远远高于采集图像频率,使光源具有较好的稳定性。设图像传感器采集到光源辐照度值为Lv,光源期望辐照度值为Lp,A为设定的光源变化幅值(A可通过实验得到,以不影响检测精度为准),当|Lv-Lp|>A时,通过伺服控制光源电源以使|Lv-Lp|≤A,为了防止光源供电电源的工频干扰,在设计光源的电源时,将功率主回路和输出回路分别在两块电路板上制作[5]。光源前方安装有机玻璃,不仅透光率好,而且使光照柔和均匀。
3 模拟实验验证
在实验室模拟隧道现场环境,搭建实验平台,获取检测数据,验证标定方法可行性。实验平台的搭建包括硬件平台搭建和软件平台搭建。硬件平台搭建模型如图2所示。

图2 硬件平台搭建模型图
采用单片机控制、步进电机驱动、滚珠丝杠传动和直线导轨承载,研制一套高精度自动标定移动台[6]。将光源安装到标定移动台上,摄像机安装在光源正对面,通过标定移动台的移动模拟隧道变形。软件平台的搭建,主要是搭建宿主机开发平台。理论标定分两步进行:离线标定和在线标定。离线标定时,首先进行图像灰度值标定。在保证辐照度均匀的情况下,拍摄多幅不同辐照度下的图像。利用MATLAB读取图像,通过最小二乘法进行回归运算计算标定参数,并按照式(3)进行标定。标定前后的图像效果如图3所示,横坐标表示第x个像素,纵坐标表示灰度值。标定前,如图3(a)所示,图像出现不规则条纹,灰度值响应幅值在50之内;标定后,如图3(b)所示,不规则条纹消失,灰度值响应稳定,表现为一条直线。然后,进行摄像机内参数标定。
选用棋盘格作为标定模板,从不同角度拍摄多幅图像。利用MATLAB读取图像,通过Camera Calibration Toolbox for Matlab对模板图像进行处理,得到摄像机内参数,并按照式(4)~式(6)进行畸变校正。畸变校正效果图如图4所示。校正前,如图4(a)所示,棋盘格线条略有弯曲;标定后,如图4(b)所示,弯曲明显改善。图4(c)误差模型显示,经过标定,像素坐标的畸变误差得以控制,以稠密状分布。
在线标定时,调整拍摄距离为5 m,保证图像传感器平面与光源平面平行,然后对自身前方的光源进行拍摄。由于隧道短时间变形量微小,定义标定移动台移动的标定值L的实验范围为1~10 mm.输入标定值,控制标定移动台移动,每移动一次,摄像机拍摄一次。拍摄时,先采集图像,连续采集10幅图像进行图像叠加之后取平均,再进行图像处理,运载得到一组坐标值(图像处理过程中,倾角传感器测量的图像传感器水平倾角作为外部参数,传递到图像处理程序中,完成角度补偿)。每移动到一个新位置,在该位置连续测量9组坐标值,取中值坐标值作为该位置的测量数据。由于标定移动台精度很高(至少比视觉检测系统精度高一个数量级),可忽略其本身给检测精度带来的影响。设(X1,Y1)和(X2,Y2)分别为移动过程中相邻两点的测量数据,L为标定值,计算相对变形量Δd和检测误差Δ:

(a)标定前图像及灰度值分布

(b)标定后图像及灰度值分布
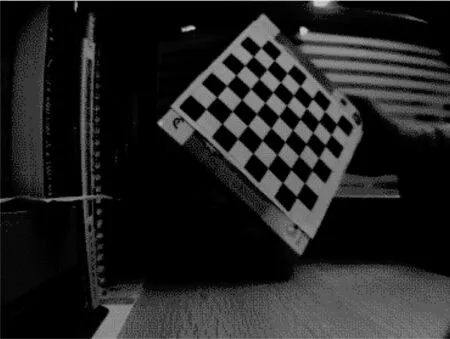
(a)畸变矫正前

(b)畸变矫正后
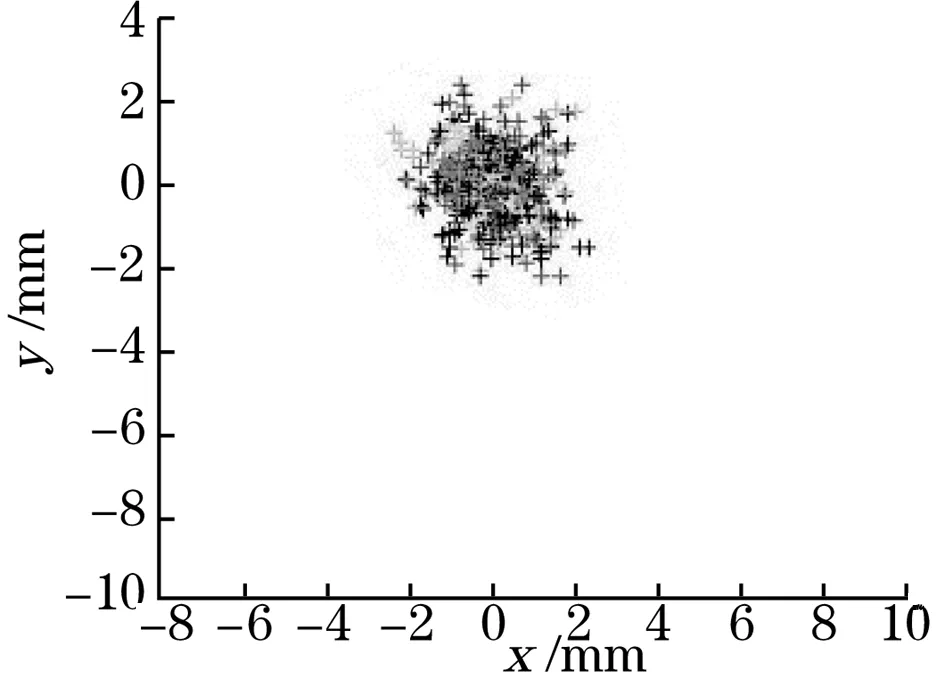
(c)标定误差模型
(13)
Δ=|L-Δd|
(14)
通过Excel拟合出检测误差Δ与标定值L的关系曲线,如图5所示。标定之前,5 m拍摄距离、标定值在10 mm之内时,检测误差小于0.2 mm;标定之后,5 m拍摄距离、标定值在10 mm之内时,检测误差小于0.1 mm.检测精度满足监测仪器的单点测量精度要求。对比标定前后误差,视觉
检测系统的检测精度得以改善,特别对于标定值较大的检测,标定后的检测精度提高显著。
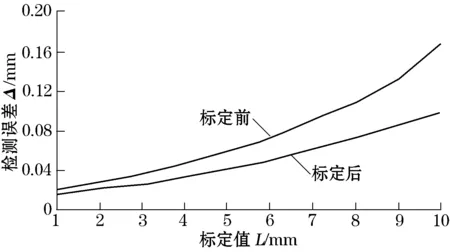
图5 检测误差Δ与标定值L的关系曲线图
4 结束语
在分析了图像传感器不均匀性、光学镜头畸变特性和光源照明特性等因素对地铁隧道变形监测仪器视觉检测系统检测精度的影响后,设计了具有针对性的标定方法,该方法分别对图像灰度值、摄像机内参数和摄像机外参数标定,修正了图像灰度值,矫正了图像畸变,并获得较高精度的比例系数。对视觉检测系统的模拟实验表明,标定后的检测精度满足监测仪器的单点测量精度要求。
参考文献:
[1]周奇才,江胜男,刘志科,等.地铁隧道纵向形变网络传感器测量系统误差分析.测控技术,2010,29(8):13-15.
[2]程万杰,赵杰,蔡鹤皋.CCD像素响应非均匀的校正方法.光学精密工程,2008,16(2):314-318.
[3]ZHANG Z Y.A flexible new technique for camera calibration.IEEE Transactions Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[4]赵炯,侯晓梦,杨天琳 等.基于图像传感器的圆心定位技术实用化研究.传感器与微系统,2011,30(10):4-7.
[5]浦昭邦,屈玉福,王亚爱.视觉检测系统中照明光源的研究.仪器仪表学报,2003,24(4):438-439.
[6]魏彩乔,王晓光,康会峰.基于图像处理的钢卷尺自动检定系统.仪表技术与传感器,2012(6):88-90.
猜你喜欢
上海工艺美术(2021年4期)2021-04-24
东南大学学报(自然科学版)(2020年1期)2020-01-16
中华环境(2018年6期)2018-07-03
摄影之友(影像视觉)(2017年10期)2017-11-07
中华建设科技(2017年8期)2017-09-25
计算机测量与控制(2017年6期)2017-07-01
数学小灵通·3-4年级(2017年3期)2017-04-16
上海农业学报(2017年3期)2017-04-10
中国铁道科学(2015年4期)2015-06-21
中国高新技术企业(2015年22期)2015-06-15