基于FPGA的低功耗无缆地震仪校钟系统
2014-03-22 03:07李君辉陈祖斌申茂冬朱亚东洋庞广华
仪表技术与传感器 2014年11期
李君辉,陈祖斌,申茂冬,朱亚东洋,庞广华
(吉林大学仪器科学与电气工程学院,吉林长春 130061)
0 引言
随着社会的不断发展,人类对金属矿产资源的需求与日俱增,磁法勘探、电法勘探、地震勘探、放射性勘探、物探新方法等一系列物探技术应运而生。如今地表和浅层的资源越来越少,难以满足社会发展的需要,据预测未来若干年,国内主要金属矿产资源需求仍将有大幅度增加[1]。深部资源探测是解决金属矿供需的根本途径,地震勘探以其探测深度大、精度高的特点,是进行地球深部探测的有效的技术手段之一。
地震勘探仪器是地震勘探的关键设备,用于完成对野外地震数据的采集和记录[2]。法国Sercel公司生产的地震采集系统是目前国内外比较认可的,尤其是近年来推出的Unite与428XL是目前国际市场上应用较好的主流产品。但是这两款产品都是依靠GPS工作,在野外GPS失锁时内部时钟只能维持15~25 min.
为了满足国家经济快速发展对资源的需求,以及提升在深部探测方面的核心竞争力,国内加强了对地震勘探技术及仪器的研究。在这种背景下,国内开展了深部探测技术与实验研究专项(SinoProbe,2008—2012),这也是国内历史上实施的规模最大的地球深部探测计划[3]。其中,针对地球深部目标探测需求,吉林大学自主研制了无缆自定位地震仪及其相应的配套仪器。无缆自定位地震仪采用无通讯链路连接方式,各地震采集站独立工作,以GPS接收机输出的1 PPS脉冲信号为基准,采用整秒触发的方法同震源同步工作[1],实现几百道甚至成千上万道同步采集。目前无缆自定位地震仪已经研制成型并于2012年12月应用在辽宁兴城野外实验中。
如上所述,目前主流的地震仪主要依靠GPS输出的1PPS脉冲进行同步采集,当无GPS信号时才会使用系统内置的时钟模块作为同步时标,GPS接收机的长时间运行无疑会造成较大的能耗。为了更好地适应野外长时间工作的需要,尽可能的降低功耗,该系统在原有地震仪的基础上提出了定时校钟的方法,在地震仪工作过程中大部分时间关闭GPS,将采集站内置时钟作为采集站第一同步时标,在满足采集站同步精度的同时降低了仪器的功耗。
1 校钟系统原理
石英晶体因切割工艺水平限制而存在中心频率误差,通常为 2~50 ppm(1 ppm=10-6),长时间运行后会产生较大的累积偏差。石英晶体振荡器走时精度可以通过补偿晶体的中心频率误差和温度漂移来提高,目前常用的两种补偿方法为电容补偿和数字补偿。电容补偿通过调整晶体振荡电路的谐振电容值来调整震荡频率向温度漂移的相反方向变化,数字补偿则是通过增加或者减少分频器中每s对振荡器周期的计数个数来修正频率漂移带来的偏差。由于晶体测温的不精确和补偿方法精度水平的限制,补偿所能达到的精度仍然很有限。因此该设计在数字补偿的基础上,结合无缆地震仪的使用要求,提出了一种利用GPS的高精度授时定时校钟的方法。
GPS(Global Positioning System,全球定位系统)是利用美国的24颗GPS卫星所发射的信号而建立的覆盖全球的导航、定位、授时系统,可提供高精度、全天时、全天候的导航、定位和授时服务。用户仅需要一个GPS 接收模块就可以得到与UTC国际标准时间同步的高精度1PPS脉冲(pulse per second),以及通过串口输出的含有与其相对应的绝对时刻。其优异的授时性能,使其在同步系统中得到了广泛应用。
该校钟系统便是结合GPS的1PPS脉冲无累计误差和高精度石英晶体振荡器无随机误差的特性,利用GPS输出的1PPS脉冲及与其对应的UTC信息,采用定时的方法校准、同步各采集站内置的时钟模块。具体实施方案为:当到达预设校钟时刻时,开启GPS,利用GPS接收机输出的1 PPS脉冲信号,采用直接计数的方法,实现对采集站内置32.768 MHz恒温晶振的频率校正;同时利用1 PPS脉冲进行各采集站的秒分频信号边沿校准;最后,利用ARM解析出的GPS时间信息校正各采集站内部时钟。校正成功后,关闭GPS。此后以校正后输出的秒分频信号作为无缆地震仪采集站的同步时标,同时采集站内部时钟依靠该秒分频信号实现计时功能,给地震仪内的数据采集电路提供精确时钟,以便每台采集站在同一时刻下工作。
2 校钟系统设计
2.1系统结构设计
设计采用Cyclone II系列EP2C8Q208C8 FPGA芯片作为校钟系统的控制和数据处理核心,基于Quartus II开发平台,设计了如图1所示的校钟系统。由图可知,系统主要由GPS接收机、ARM、串口通信、校钟控制模块、分频模块、时钟模块和定时模块组成。文中将对主要模块进行介绍。

图1 系统结构框图
2.2各分模块介绍
2.2.1 GPS接收机
GPS接收机主要为校钟系统提供UTC时刻信息以及与UTC国际标准时间同步的1PPS脉冲。校钟开启时,系统将以此为依据进行校频、校沿及校准当前时刻。
设计所采用的GPS接收机为Crescent系列HC12A单频接收机,该GPS接收模块是一款单频12通道接收机,支持12通道全视野操作,可进行C/A码与L1全波载波相位测量,通过单站多星测时方法能提供50 ns精度1 PPS(Pulse Per Second)脉冲信号输出。其数据输出格式采用 NMEA-0183消息协议和SLX二进制数据。
2.2.2 ARM
ARM作为系统的主控制模块,主要负责在系统启动时初始化系统(主要为校钟控制、计时、定时模块赋初值),并在系统工作过程中根据串口模块的反馈信息进行开启GPS、解析并输出UTC、输出预设定时信息等操作。
2.2.3 串口通信
作为ARM与FPGA沟通的“桥梁”,该模块的主要功能是实现FPGA与ARM的信息交互,即将FPGA的相关模块的状态信息反馈给ARM,或根据ARM的初始化、校时、更改定时时间等指令对FPGA相应模块进行设置。
2.2.4 时钟模块
时钟模块由校钟控制、分频、计时等模块组成。该模块具有年、月、日、时、分、秒计时功能,作为采集站的内部时钟,为定时模块提供精确的当前时刻信息。此外,该模块可根据定时模块的相关命令,利用GPS进行校频、校沿以及校准当前时刻。
2.2.5 定时模块
定时模块的主要目的是监控当前时刻,将其与系统预设的校钟时刻、采集开始时刻与停止时刻进行比较,并根据判断值,输出校钟控制信号或采集控制信号。
3 校钟系统关键技术
3.1校钟
如上所述,该模块主要依据GPS接收机输出的高精度的1 PPS脉冲信号以及经ARM解析的精确到秒的UTC信息进行校准时钟模块的当前时刻与秒分频信号的周期及上升沿,为各采集站输出精确的同步信号及当前时刻。该设计所采用的校钟方法分为校频、校沿与校正时刻3个步骤,文中将分别对3个步骤加以介绍。
3.1.1 校频
如图2所示:通过对2个1 PPS脉冲之间的clk脉冲计数来校准恒温晶振的频率,当计数完成后,使其输出高精度的秒分频信号。在计数过程中,如果计数值超过3 N/2,则表示GPS失锁,计量的不是两个相邻1 PPS脉冲之间的clk脉冲个数,FPGA将对计数器清零,重新计数,直到测得两个相邻1 PPS脉冲之间的clk脉冲,停止计数,并将计数值T1传递给分频模块。

图2 校钟控制流程图
3.1.2 校沿
校频操作完成后,分频模块输出高精度的秒分频信号。由于多个采集站输出的秒分频信号的上升沿产生时刻各不相同,因此,有必要对秒分频脉冲进行校沿。该系统所采用的方法如图3所示,当1 PPS上升沿来临时,对计数器counter1清零,重新计数,由于事先已进行校频,因此,下一个1 PPS上升沿到来时,分频计数器刚好计算完一个周期并输出上升沿,从而实现各采集站秒分频信号的上升沿同步。

图3 校沿与秒分频信号输出流程图
3.1.3 校准当前时刻
由于累积误差的存在,系统经过一段时间的运行后,各采集站内部时钟的当前时刻值可能会有差异,因此,校沿操作完成后,有必要对系统时钟的当前时刻进行校正。其过程如下:在校频过程中,串口通讯模块向ARM请求并接收ARM解析出的当前时刻信息,然后在下一个秒分频信号上升沿到来前,将时刻信息传递给系统时钟模块。
3.2定时
为了降低无缆地震仪的功耗,延长系统的工作时间,地震仪采用定时校钟设计,使GPS长时间的处于关闭状态,只有在特定时刻开启一段时间。因此需要在系统中加入一个定时模块,将当前时刻与系统预设的希望需要校时的时刻进行比较,当前时刻到达预设时刻时,通知相关模块,进行校钟。ARM可以存储多个校钟时刻,当一次校正完成后,定时模块通过串口接收下次校钟时刻信息,从而达到多次校钟的目的。详细过程请参考图4。
此外,此模块通过比较当前时间与系统预设采集时间,判断采集系统是否采集。同样,可以在ARM模块中预设多组采集的开始时刻与停止时刻,当采集完成一次后,定时模块可以通过串口模块接收下组时间窗信息,达到分段采集的目的。详细流程如图4所示。

图4 定时模块设计流程图
4 误差分析与仿真测试
4.1误差分析
秒分频信号的误差主要来源于校准时所产生的绝对时间偏差和走时所产生的累积偏差,分别记为ΔT1和ΔT2。
绝对时间偏差包括GPS 秒脉冲自身误差以及分频得到的秒分频信号边沿误差。由于GPS 卫星信号既不会老化,也不会漂移,因此,GPS接收机的1 PPS脉冲同步误差恒为±50 ns.同样由于设计的原因(详情见图4),秒分频信号边沿误差最大为一个时钟脉冲周期±30 ns.综上所述,绝对时间偏差为:
ΔT1=±(50+30)ns
(1)
同理,GPS 1 PPS脉冲与恒温晶振时钟之间的相位差是随机的,2个IPPS脉冲之间的计数值会有一个±1的误差,因此,1 s内恒温晶振所产生的积累偏差为:1/32.768 MHz(±30 ns)。即时钟校正后运行时间为nmin,则其走时累积偏差为:
ΔT2=±30×60 n=±1 800n(ns)
(2)
综上所述,可得采集站内部时钟同步误差为:
ΔT=ΔT1+ΔT2=±(80+1 800n)ns
(3)
因此,若采集前5 min完成一次校钟操作,则同步误差为:
ΔT=ΔT1+ΔT2=±(80+1 800×5)=9 080 ns
(4)
同理,若采集前1 s完成一次校钟操作,则同步误差为:
ΔT=ΔT1+ΔT2=±(80+1 800/60)=110 ns
(5)
无缆地震仪采集站所要求时钟同步精度为0.01 ms.通过计算可以看出,只要采集前5 min内如果能成功完成一次校钟操作,即能满足采集站所要求的时钟同步精度,如果,采集前一秒能完成一次校钟操作,则采集站内部时钟同步误差仅为0.11 μs,比系统要求的误差提高了2个数量级。
4.2仿真测试
系统仿真基于Quartus Ⅱ开发平台,采用VHDL硬件描述语言编写校正程序,并进行时序仿真,仿真结果如下。
图5为系统校钟部分仿真图,从图中可以看出,刚开始时,分频得到的秒分频信号脉冲s_sig周期小于1 s,上升沿也与1 PPS脉冲边沿存在偏差,而且当前时刻pr_time也与UTC时间不同。当pr_time等于系统预设的校钟时刻adjust_time时,校钟控制信号adjust变为高电平,系统开始完成较频、校沿以及校正当前时刻等操作,同时修改下次校正时刻。很明显,通过校钟操作,秒分频信号s_sig的周期变为1 s,上升沿基本上与1 PPS脉冲上升沿吻合,当前时刻也与UTC时刻一致。
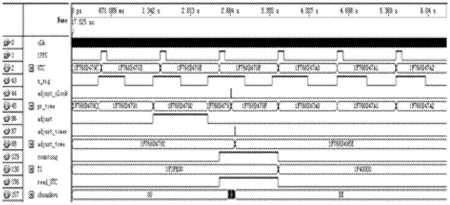
图5 系统校正仿真波形图
图6为分段采集仿真波形图,仿真图中预先设置时间窗,图中pr_time到达预设的start_sample时,采集信号sample输出高电平,系统开始采集。维持到预设的stop_sample时,采集信号sample又变回低电平,采集结束。同时,系统更改采集的开始时刻与结束时刻,设置下次采集的时间窗。
5 结束语
根据野外地质勘探的实际需求,设计了基于FPGA的定时校钟系统。首次提出了低功耗无缆地震仪定时校钟设计,即通过定时开启GPS,降低了系统的功耗,延长了系统在野外稳定工作的时间。通过在线修改校钟时刻,实现多次校钟,提高了系统的稳定性;同时提出了无缆地震仪在线可更改采集开始时刻与结束时刻的方法,实现了分段采集的功能,可以一次布置,多次采集,提高了野外工作的效率。最后,通过时序仿真和分析验证,表明该设计完全能够满足无缆地震采集系统对于较高的同步精度的要求,使无缆自定位地震仪在野外复杂环境中更具优势。

图6 分段采集仿真波形图
参考文献:
[1]杨泓渊.复杂山地自定位无缆地震仪的研究与实现:[学位论文].长春:吉林大学,2009.
[2]甘志强.几种主流地震勘探仪器性能分析探讨.石油仪器,2013,27(1):21-24.
[3]董树文,李廷栋,陈宣华,等.我国深部探测技术与实验研究进展综述.地球物理学报,2012,55(12):3884-3901.
[4]杨泓渊,韩立国,林君,等.无缆遥测地震仪网络同步采样技术.仪表技术与传感器,2009(3):15-18.
[5]PEDRONI V A.VHDL数字电路设计教程.乔庐峰,王志功等译.北京:电子工业出版社,2005.
[6]王诚,蔡海宁,吴继华.Altera FPGA/CPLD 设计(基础篇),第2版.北京:人民邮电出版社,2011.
[7]邓明,魏文博,李哲,等.海底地电探测仪器的对钟与计时技术.实验技术与管理,2003,20(5):89-92.
[8]李泽文,曾祥君,黄智伟,等.基于高精度晶振的GPS秒时钟误差在线修正方法.电力系统自动化,2006,30(13):55-58.
作者简介:李君辉(1989—),硕士研究生,主要研究方向为地震探测技术及仪器。E-mail:bhdxljh@126.com
猜你喜欢
数学物理学报(2022年3期)2022-05-25
环球人物(2022年4期)2022-02-22
数学小灵通·3-4年级(2021年9期)2021-10-12
小资CHIC!ELEGANCE(2021年32期)2021-09-18
小学生学习指导(低年级)(2020年10期)2020-11-09
数学物理学报(2019年5期)2019-11-29
中成药(2017年12期)2018-01-19
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
小学阅读指南·高年级版(2014年2期)2014-05-27