
基于ARM的单神经元自适应PID电机软起动的实现
2014-03-21 10:49石守东杨巨星蔡恩丰宋雨倩包启树
仪表技术与传感器 2014年2期
石守东,杨巨星,蔡恩丰,宋雨倩,包启树,王 华
(1.宁波大学信息科学与工程学院,浙江宁波 315211;2.人民电器集团,浙江温州,325604)
0 引言
虽然三相异步电动机广泛应用于工业生产中,但是三相电动机的直接起动,却存在起动冲击电流(起动电流是额定电流的4~8倍)、冲击扭矩等问题。这就导致当电机起动时,冲击电流会使配电系统产生较大的波动,直接影响其他电力设备的正常运行,同时冲击扭矩也会加快机械损坏和老化。因此,大功率三相异步电机只有普遍采用软起动器起动电机,才能在起动中使软启动器更好地调节电动机电流或电压,以使电机平稳地起动,从而避免冲击电流和冲击转矩。
目前,国内大多企业生产的软启动器与国外同类产品在技术上存在差距,主要表现在:电机软起动器控制方法落后,控制精度差(国内软起动控制器采用的8位或16位单片机不能实时处理复杂的控制算法),控制功能弱。针对存在的这些问题,该项目参照国外同类产品,采用32位ARM处理器作为软起动器的控制芯片,同时应用先进的控制算法来控制电机的起动。
选择采用单神经元自适应PID控制方法对电动机的起动过程进行控制,原因是单神经元作为神经网络的基本单位,具有自学习和自适应能力。如果将它与传统的PID控制方法结合起来,通过自学习功能不断修正PID控制参数权重,自动寻求系统最优的控制品质,并在控制过程中,根据系统误差以及误差变化率对神经元比例系数进行调节,就可以达到更好的动、静态性能。
1 软启动器控制系统构架设计
设计的智能软启动器整体结构包括电动机定子侧电压/电流检测电路,电压/电流的数据采集电路、晶闸管驱动电路、功率因素角检测电路、电动机转速检测电路、保护电路、上位机与软启动器主控系统并行通信电路、按键及液晶显示电路等。软件平台应用32位ARM微处理LPC2378作为控制核心部件[1],移植并使用实时多任务μC/OS嵌入式操作系统[2],软件所有程序模块都是建立在该系统上进行的,该软起动器软件设计的主要目的是提高异步电机软启动系统的可靠性与抗干扰性,并且为用户提供简洁、方便、清晰的人机对话界面,实时监控显示电机的三相工作电压、电流、功率、转速等;提供准确、及时的保护,上位机与软启动器主控系统并行通信等,因此,该软启动器具有很好的智能性。
整个软启动器的系统结构如图1所示。程序采用模块化设计,主要由主程序模块、信号采集模块、参数设置模块以及数据通信模块组成。主程序模块主要用于计算、分析、比较采集到的数字信号,执行相关动作并显示相关数据;信号采集模块负责对多路交流信号进行周期性高速采样;参数设置模块主要通过控制键盘实现人机对话功能,完成对启动器运行参数的设置;数据通信模块按照TCP/IP协议要求,通过以太网/RS485,组织收发数据包。

图1 智能软起动控制器原理框图
该智能控制系统是以锁相环为中心的同步信号检测电路,可以避免外界某种因素,使主电路发生断相,经三相同步变压器以及过零比较器取得的同步信号的相位将发生变化,导致晶闸管误触发。由于微处理器ARM能够实现准确定时,故可简化线路,文中采用单相变压器实现与电网同步,选用线电压UBC的过零信号作为同步信号,经过倒相后等到的相电压UA可以作为微处理器ARM处理的同步脉冲信号。对应的输入线电压UBC波形、经比较器产生的方波U1以及倒相后输出的同步信号检测波形U2如图2所示。

图2 同步检测波形图
2 单神经元自适应PID控制
由于PID控制算法简单,鲁棒性和可靠性高,所以被广泛应用于过程控制中。但三相交流异步电动机的起动过程是具有非线性、高阶、强耦合的时变系统。如果采用常规的PID闭环控制,虽具有结构简单,调整方便等特点,却不易在线实时调整参数,不能取得对非线性系统很好的控制效果。单神经元自适应PID控制算法的采用,很好地结合了PID控制算法简单、鲁棒性和可靠性高的特点[3],以及神经元有自学习和自适应性两种算法的优势[4],不但可以不断修正PID控制参数的权重,同时可以自动寻求系统最优的控制品质。
单神经元自适应PID控制结构如图3所示。图中误差计算器根据输入的设定值Rin(k)和输出值Y(k),输出神经元学习所需要的误差向量X1,X2,X3,K为神经元的比例系数。
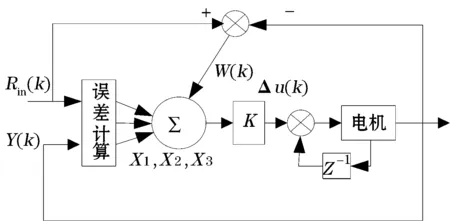
图3 单神经元自适应PID控制结构
单神经元自适应控制器是通过对加权系数的调整来实现自适应、自组织功能的,权系数的调整按有监督的Hebb学习规则进行实现[5]。控制算法及学习算法为:
(1)
(2)
w1(k)=w1(k-1)+ηIz(k)u(k)x1(k)
(3)
w2(k)=w2(k-1)ηPz(k)u(k)x2(k)
(4)
w3(k)=w3(k-1)+ηDz(k)u(k)x3(k)
(5)
式中:
x1(k)=e(k)
(6)
x2(k)=e(k)-e(k-1)
(7)
x3(k)=Δ2e(k)=e(k)-2e(k-1)+e(k-2)
(8)
z(k)=e(k)
(9)
式中:ηI,ηp,ηD分别为积分,比例,微分的学习速率;K为神经元的比例系数,K>0。
对积分I,比例P和微分D分别采用了不同的学习速率ηI,ηP,ηD,以便对不同的权系数分别进行调整。
K值的选择非常重要。K越大,则快速性越好,超调量越大,甚至可能使权系数不稳定。当被控对象时延增大时,K值必须减小,以保证系统稳定。K值选择过小,会使系统的快速性变差。
3 电机软启动仿真系统
由于电机直接启动会带来很大的冲击电流,这种冲击电流对电网以及电机的使用寿命都有严重的影响,因此软启动器的任务是解决如何降低电机启动时带来的冲击电流。所以控制系统采用3对反向并联的晶闸管串联到3根火线上,通过控制触发角α来控制6个晶闸管的导通与截止。为使加载在电动机两端的电压缓慢地上升,就要由较低晶闸管通断交替频率开始。此时断流时间间隔较长,当电压达到稳定值之后,通过继电器开关短路6个晶闸管,即软启动结束[6]。在软启动过程中,三相电路中至少要有一相正向晶闸管与另一相的反向晶闸管同时导通,三相电路中正向晶闸管的触发信号相位相差2π/3,反向晶闸管的触发信号相位也相差2π/3,但是同一相中反并联的两个正、反向晶闸管触发信号相位相差π。控制晶闸管的导通与截止实际上是对导通角的控制,实现异步电机启动时电压、电流的实时监控[7]。触发角α、续流角φ、导通角θ满足这个关系:θ=π-α+φ;其中触发角α要大于续流角φ.
根据软起动器的工作原理和控制方法,应用Matlab/Simulink软件工具建立电机软起动器的仿真系统,系统框图如图4所示。其中包括同步信号检测模块(Detect zero Current/Voltage)、时钟信号模块(Pulse Generator)、控制脉冲信号触发模块(Thyristor Control Pulse)、晶闸管调压模块(Thyristor Mode)、电压电流检测模块(Measure Currenrt/Voltage)、三相异步电机模型(Asynchronous Machine SI Units)、扭矩模块(Torque)、误差输出模块(Error Calculation)、设定模块(Control Signal)和控制方法模块(Control Method)。

图4 仿真系统图
电机软起动器仿真系统在时钟模块时间脉冲统一控制下,首先由电流和电压过零检查模块检查电压和电流过零点,并计算出续流角φ;接着由三相电机的电流和电压模块检测电机的电压和电流的的大小,并与设定模块数值进行比较,计算出误差;最后根据计算出的续流角和电压、电流误差,由单神经元自适应PID控制方法[8]计算出导通角θ,并由控制脉冲信号触发模块产生触发脉冲,控制晶闸管导通。
4 仿真结果与分析
对控制系统进行仿真。选用电动机参数如下:P=75 kW,V=380 V,f=50 Hz,n=1 500 r/min,仿真电机参数:转子Rr=0.02092 Ω,Lr=0.000335H,定子Rs=0.03552 Ω,Ls=0.000335 H,Lm=0.015 1 H,转动惯量J=1.252 kg·m2.考虑到最常用的负载机械情况,在仿真中选用水泵和风机类负载作为仿真对象,扭矩正比于电机转速的平方f∝M×n2,其中系数M=0.013 33。
电机起动方式采用具有限流功能的电压斜坡控制方式,如图5所示。设初始电压为U0=50 V,以增加初始转矩,然后控制电压,随时间电压按斜坡增长。
三相异步电机起动过程中A相的电压变化如图6所示,A相的电流变化如图7所示,电机起动过程中转速变化如图8所示,电机转子和定子的电流如图9和图10所示。图11是电机起动导通角变化图。
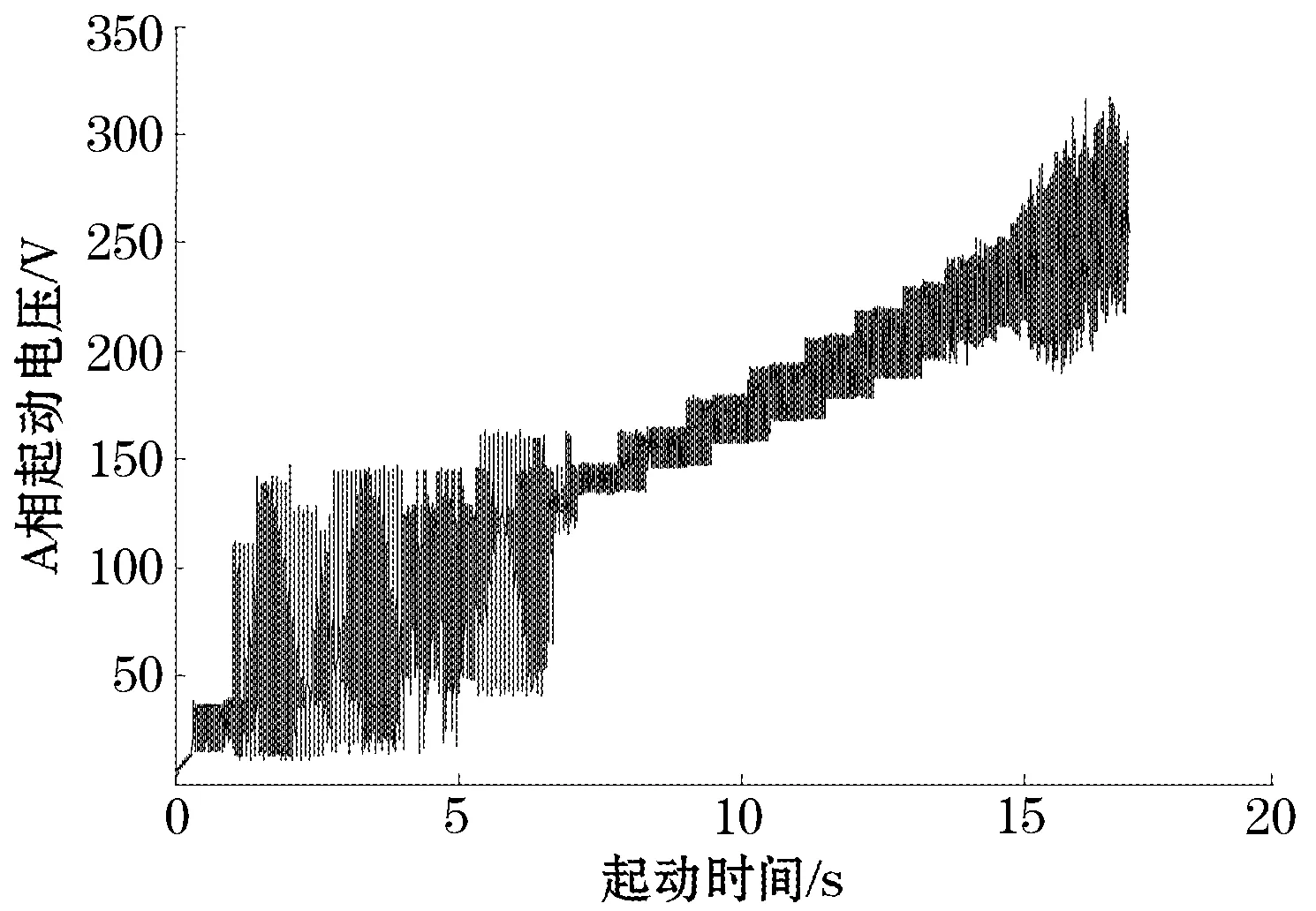
图6 A相电压变化
仿真结果表明,将单神经元自适应PID控制方法应用到电机软起动器中,可以有效地控制电动机起动时定子电流和转子电流的变化速度。并且起动过程电流变化平稳,几乎不存在冲击电流,电动机的转速以平滑的曲线达到额定转动速度。将单神经元自适应PID控制方法移到软启动控制平台上,在实际控制中获得比单独的PID控制方法或单神经元网络控制方法更好的效果。
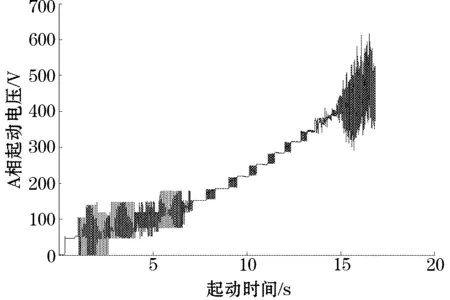
图7 A相电流变化

图8 电机启动转速变化
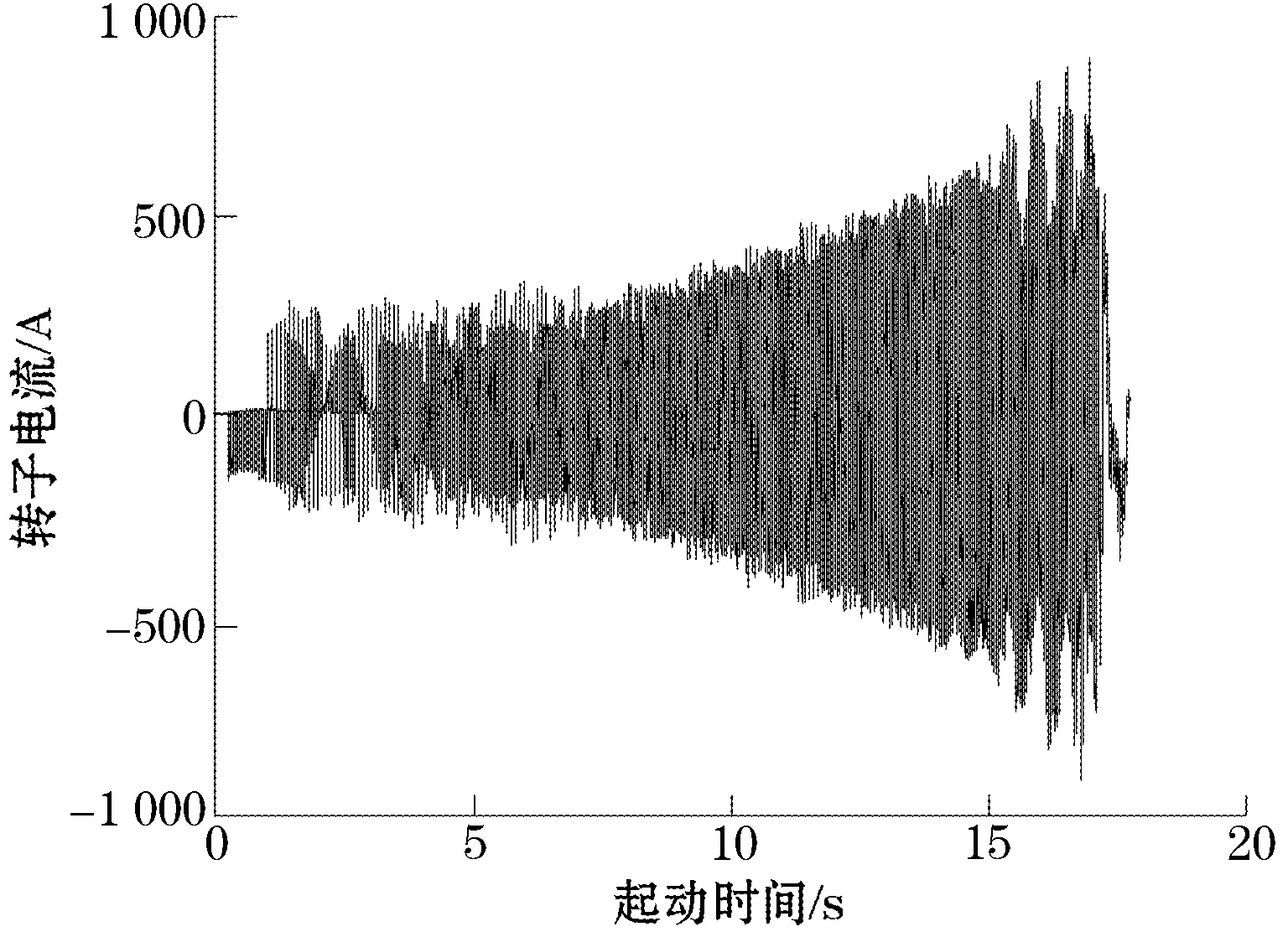
图9 电机转子电流变化
参考文献:
[1]刘利,王栋.电动机软启动器实用技术.北京:中国电力出版社,2009:18-20.
[2](美)LABROSSE J.μC/OS-Ⅱ—源码公开的实时嵌入式操作系统.邵贝贝译.北京:中国电力出版社,2001:10-30.
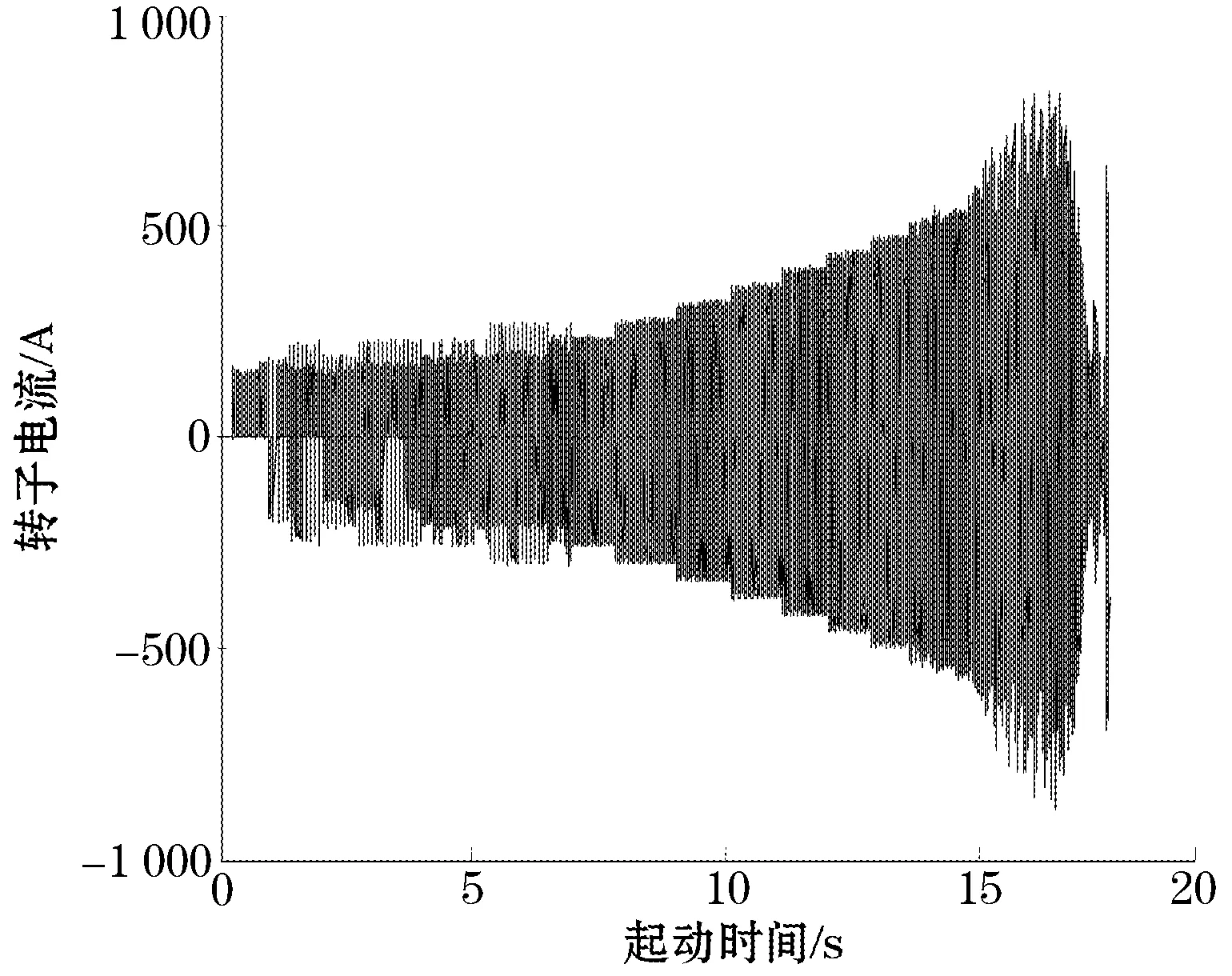
图10 电子定子电流变化
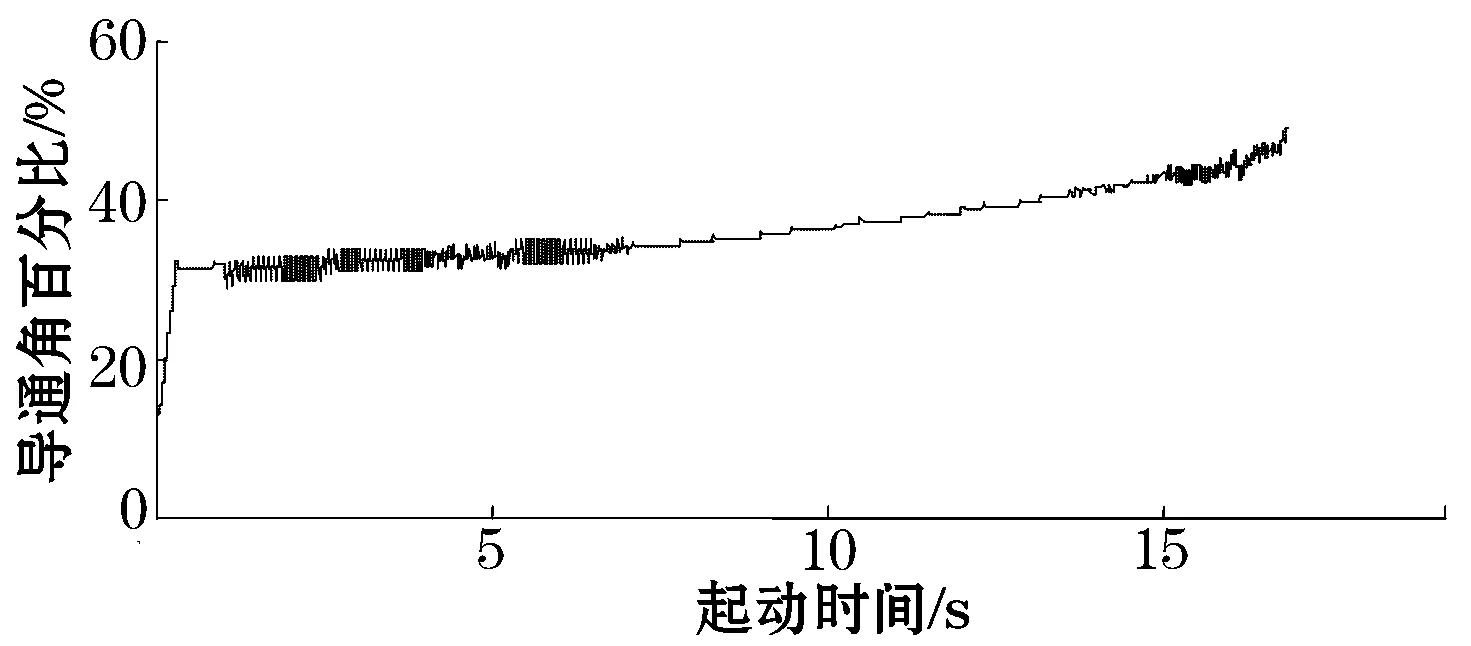
图11 电机启动导通角变化
[3]陶永华,尹怡欣,葛芦生.新型PID控制及其应用.北京:机械工业出版社,1998.
[4]飞思科技产品研发中心.MATLAB 6.5辅助神经网络分析与设计.北京:电子工业出版社,2003.
[5]李士勇.模糊控制·神经控制和智能控制理论.哈尔滨:哈尔滨工业大学出版.1999.
[6]LI H D.AC Speed Control System,Beijing:Electronic Industry Pres,2003:4-10.
[7]XIE B C,REN Y D,DSP control technology of motor and its application,Beijing:Beijing University of Aeronautics &Astronautics Press,2005:147-164.
[8]徐丽娜.神经网络控制.哈尔滨:哈尔滨工业大学出版社,2001:5-10.
猜你喜欢
四川电力技术(2022年6期)2023-01-31
现代信息科技(2022年20期)2022-11-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
舰船电子工程(2019年11期)2019-11-28
电子制作(2019年23期)2019-02-23
智能建筑电气技术(2015年5期)2015-12-10
