
便携式地表几何粗糙度参数测量仪研制
2014-03-21 12:05杨习荣
仪表技术与传感器 2014年4期
孙 刚,王 秀,刘 华,杨习荣,牛 铮
(1.中国农业大学工学院,北京 100083;2.中国科学院遥感与数字地球研究所遥感科学国家重点实验室,北京 100101;3.北京农业智能装备技术研究中心,北京 100097;4.杭州电子科技大学生命信息与仪器工程学院,浙江杭州 310018)
0 引言
地表几何粗糙度反映了地表的起伏程度,是许多陆面过程模型的关键影响因子之一,在遥感、农业、土壤学、天气与气候预测、地质、水利等领域有重要的应用[1-4]。由于地表粗糙度对电磁波的反射具有显著的影响,因此成为光学与微波遥感关注的焦点之一[5]。在农业和土壤学方面,粗糙度对入渗、洪水和土壤侵蚀过程都有影响;在气候和天气预报领域,土壤贮存和蒸发水分也有赖于土壤粗糙度情况;在地质学方面,可以依据表面粗糙度情况判断风蚀砂石的地质元素信息[6]。
廓线法(针式粗糙度板和板式粗糙度板)是当前主要的地表粗糙度测量方法。但是,由于该方法是接触式测量,其最大的缺陷是会对观测对象产生破坏,特别是对疏松颗粒或松软潮湿地表的破坏造成的微地形观测误差不可忽视;其次,其采样长度(1 m左右)和采样间距(1~2.5 cm)比较有限,测量结果的代表性较差;再次,过多的人工参与也会引入误差,测量耗费时间也较长。
测量地表粗糙度的另一种方式是采用非接触的方法。架设到一维运动平台上的激光测距仪器可以实现一条剖线上的地表高度信息获取,进而求得粗糙度信息;架设到二维运动平台的激光测距仪可以获取一个平面的地形数据,并用于提取粗糙度信息。上述2种方法都属于单点激光扫描,精度很高,但是运动平台的体积和质量较大,限制了其野外携带和应用。随着技术发展,基于快速单点激光扫描测距技术的三维激光扫描和基于结构光的摄影测量技术可以提供越来越精确的数字高程数据,在粗糙度参数研究中已展示出了较大的优势,但是其高昂的成本是制约其得到广泛应用的瓶颈[7-10]。
文中结合粗糙度测量的实际需求,设计了基于激光测距仪的便携式单剖面地表粗糙度测试仪。目的是提供一种精度不低于目前广泛应用的粗超度板式测量工具的便携式测量仪器。它扫描计算速度较快,精度较高,测量无损且易于实现自动化,是一种可靠的非接触测量方法,可获取地表上一定长度的剖面的垂直高度信息,从而计算地表粗糙度参数。
1 系统总体设计
1.1仪器结构与原理
图1为地表几何粗糙度测试仪的结构图,主要包括控制主机、激光测距传感器、电动转动机构、支撑杆等。其中,电动转动机构和控制器安装在一个箱体内,共同组成仪器的主机,该主机下方是一个轴套的结构,可以固定安装在支撑杆上端,该支撑杆有内外两个杆组成,可以上下调节高度,并且可通过紧固扭锁紧。激光测距传感器固定于电动转动机构的转轴上。控制器为该测量仪器的控制核心,主要用于人机交互、控制电机的运动、与激光测距传感器通信和计算粗糙度参数。支架的底部有3根钢针,可以插入被测地表内以固定测量仪器。
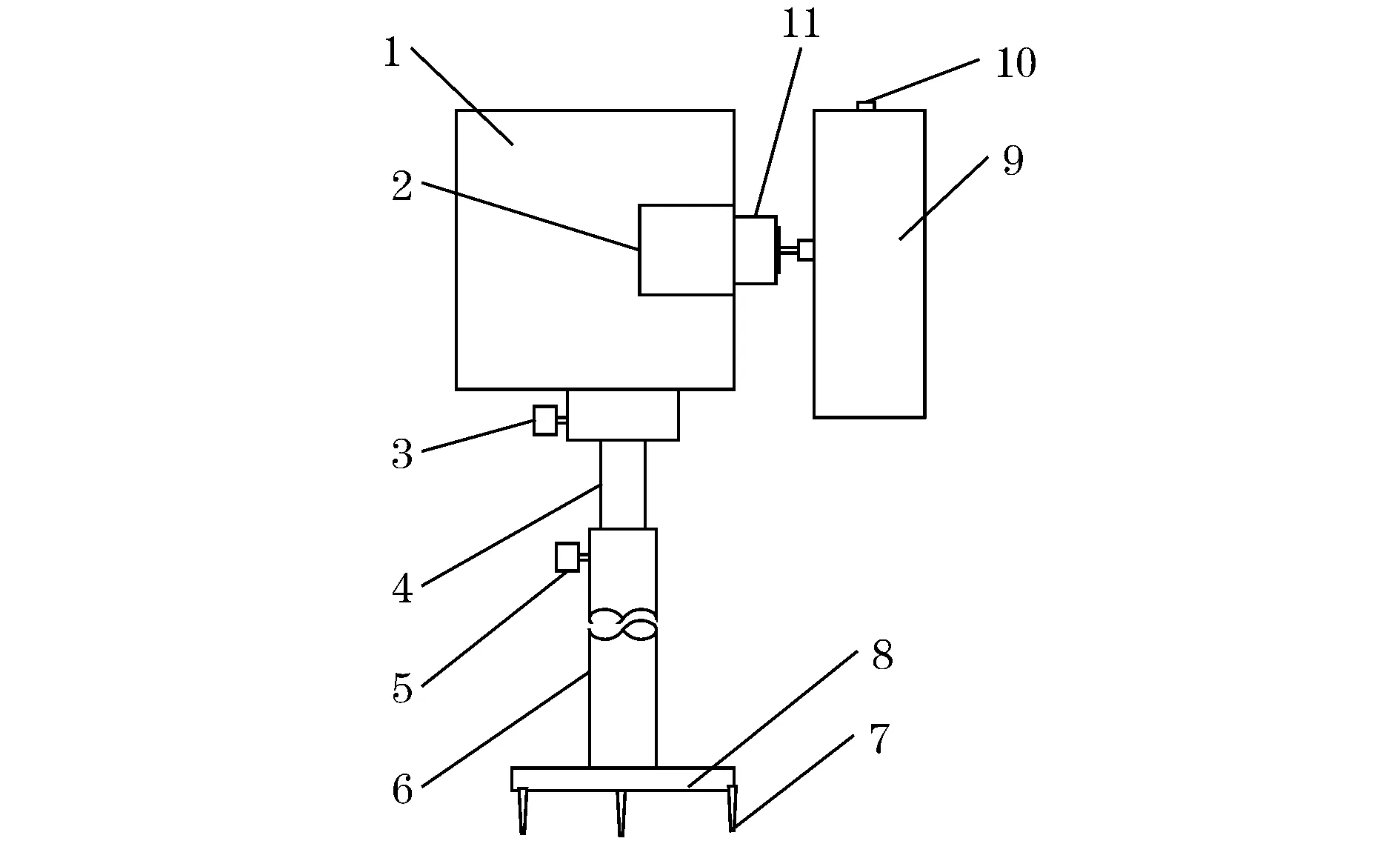
1—主机;2—步进电机;3—主机锁紧扭;4—可伸缩支撑杆内杆;5—可伸缩支撑杆锁紧扭;6—可伸缩支撑杆外杆;7—钢针;8—底座;9—激光测距传感器;10—水平仪;11—减速器单元
该仪器与传统的架设到一维或者二维运动平台上的激光测量装置最显著的区别就是用旋转代替平移,避免了复杂昂贵的运动平台,使得便携性提高的同时降低了成本。测量原理如图2所示。
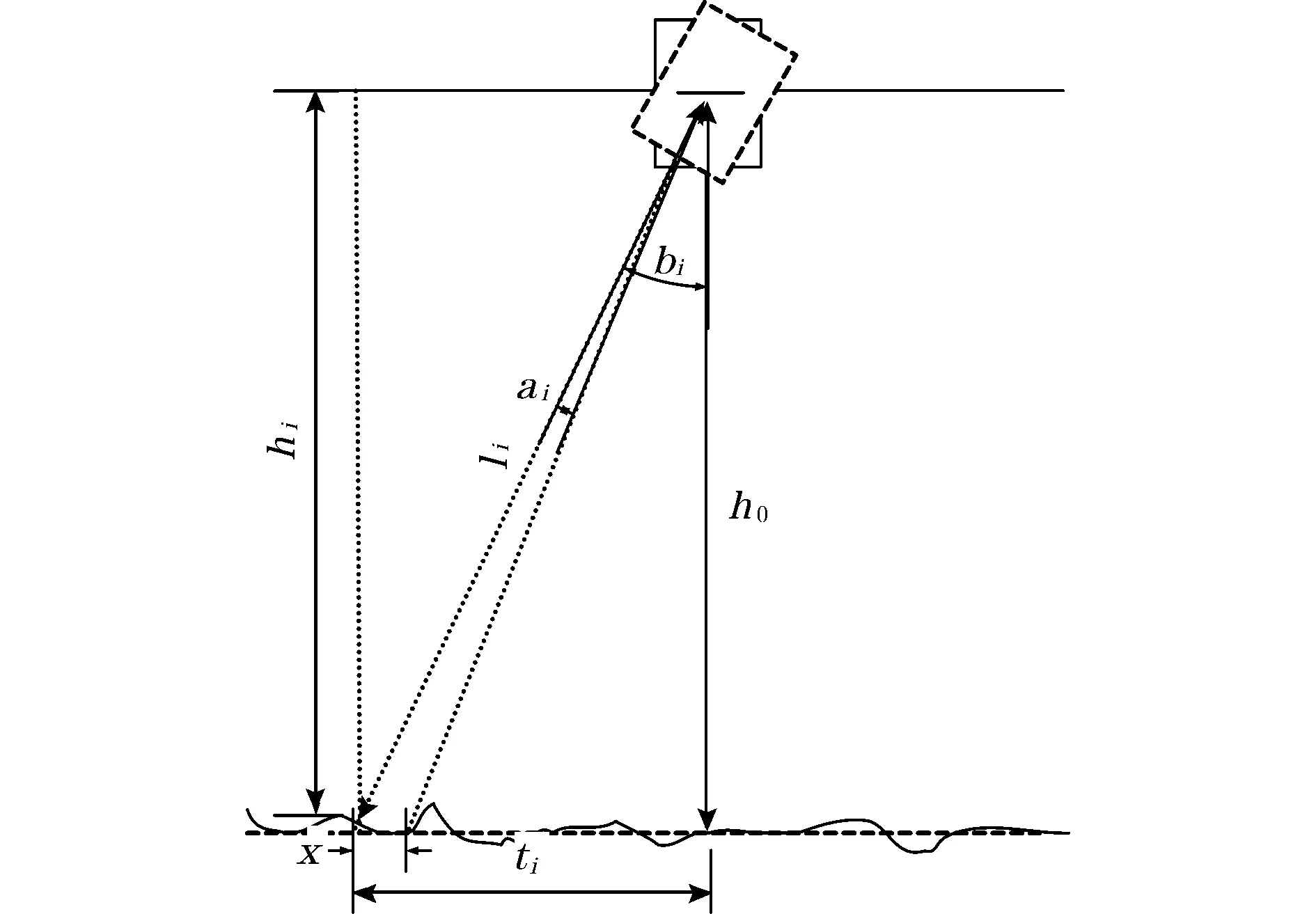
图2 地表几何粗糙度测量仪测量原理图
首先,将仪器插入待测地表,调整激光测距传感器垂直向下,测量出基准高度h0。根据基准高度,计算出在水平方向偏移1个测量间距x所需要的转动的角度ai。激光测距传感器可以在转动机构的驱动下左右旋转,激光测距传感器旋转到指定角度后,投射出激光进行距离测量,得到倾斜长度li,根据当前激光与垂直方向的夹角bi,利用三角计算,可以得出改点实际的地表高度hi.该仪器首先向左侧摆动50次,测量左侧50 cm地表所对应的高度数据,然后再向右侧摆动50次,测量右侧50 cm地表所对应的高度数据。最后,将测量的高度数据输入下面的粗糙度参数计算公式中,计算出所测长度内的地表粗糙度参数。对于该仪器测量的离散数据,粗糙度用均方差高度来表示:
(1)

相距x′=(j-1)Δx的归一化自相关函数则由式(2)给出,式中j为≥1的整数。
(2)
当相关系数ρ(x′)等于l/e时的间隔,x′值被定义为表面相关长度l,即ρ(l)=l/e,l的单位为cm.
根据上述参数,选择该系统的部件参数。仪器中使用的激光测距传感器为DLS-B15,其测量量程为0.05~200 m,典型精度为1.5 mm,具备RS-232串口。仪器支撑杆的长度为1.2~1.8 m,连续可调。
1.2控制系统硬件
系统硬件设计如图3所示。系统主要由微控制器、串口切换电路、智能液晶人机界面、激光测距传感器、通讯串口、步进电机及其驱动电路、实时时钟、数据存储器、按键和供电系统组成。
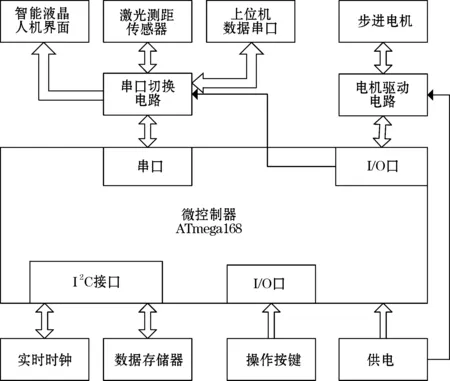
图3 地表粗糙度测量仪硬件图
采用AVR系列中的ATmega168微控制器为控制核心,控制各部分协同工作,计算出粗糙度参数。由于微控制器只有1个串口,故设置1个一到三的串口切换电路,实现微控制器与人机界面、激光传感器和上位机的分时通信。步进电机驱动器采用THB6064H芯片进行驱动,工作在1/2细分模式下。步进电机采用,其步进角度为1.8°,步进电机配套的减速器减速比为26∶1,单脉冲的步进角度为0.0346°。系统供电选择型号为BT-12M1.3AT的免维护铅酸蓄电池,使用开关电源LM2595将12 V变为5 V,为微控制器系统供电。系统配置实时时钟PCF8563为仪器提供时间,并配置数据存储器AT24C64作为测量数据的存储介质。
2 试验与结果
为测试所述粗糙度测量仪器的效果,于2012年9月在青海湖进行了野外试验,试验中以粗糙度板测量结果作为对照,首先采用该仪器进行测量,粗糙度参数计算完成后自动显示在屏幕上,并可以进行存储。然后,在相应地点采用粗糙度板在对应的测量剖线上进行测量。其中,粗糙度板测量方法需要首先进行现场拍照,然后利用编写的处理软件对照片中的地表轮廓进行提取,最后计算粗糙度和相关长度参数。
试验选择了15个点进行对照测量,分别用2种方法计算出地表粗糙度参数。2种仪器测量的粗糙度参数的结果如图4所示,数值比较相近,最大误差不超过0.8 cm,2种仪器可以相互验证,即该仪器的测量精度满足地表几何粗糙度测量的要求。

图4 地表粗糙度测量仪野外测试结果
3 结束语
文中设计了一种便携式地表几何粗糙度测量仪器。相比针式、板式等接触式测量方法,该仪器采用了非接触的测量方法,避免了对测量表面的破坏。仪器以旋转装置代替一维运动平台,同样实现一定长度的剖面的高度信息测量,具有结构简单、便携的特点,成本也得以降低;减少了人工参与过程,单次测量长度1 m,测量时间70 s左右,具有较高的测量效率。地表粗糙度测试仪可广泛应用于地表粗糙度的测量,为光学和微波遥感中参数定量化研究提供技术支撑。
参考文献:
[1]BERTUZZI P,CAUSSIGNAC J,STENGEL P,et al.An Automated,Noncontact Laser Profile Meter For Measuring Soil Roughness In Situ.Soil Science,1990,149(3):169-178.
[2]HUANG C,WHITEI,TH WAITEE,e al;A Noncontact Laser System for Measuring Soil Surfcae Topography.Soil Sci.Soc.Am.J,1988,52:350-355.
[3]江冲亚,方红亮,魏珊珊.地表粗糙度参数化研究综述.地球科学进展,2012,27( 3) :292-303.
[4]张露,郭华东,廖静娟,等.利用极化SAR数据探索同极化相关特征随地表粗糙度变化的研究.高技术通讯,2008,18(12):1304-1309.
[5]郑兴明,赵凯.被动微波遥感中一种表面粗糙度参数估计方法.中国地理科学,2010,20(4):345-352.
[6]MITTAL G,SINGH D.Critical analysis of microwave scattering response on roughness parameter and mois-true content for periodic rough surfaces and its retrieval.Progress In Electromagnetics Research,2010,PIER100:129-152.
[7]刘斌,冯其波,匡萃方.表面粗糙度测量方法综述.光学仪器,2004,26(5):54-55.
[8]张德海,梁晋,唐正宗,等.基于近景摄影测量和三维光学测量的大幅面测量新方法.中国机械工程,2009,20(7):817-822.
[9]张鹏,郑粉莉,王彬,等.高精度GPS ,三维激光扫描和测针板三种测量技术监测沟蚀过程的对比研究.水土保持通报,2008,28(5):11-15.
[10]李新,李小文,李增元,等.黑河综合遥感联合试验研究进展:概述.遥感技术与应用,2012,27(5):637-649.
[11]蔡祥,孙宇瑞,林剑辉,等.基于激光反射的土壤表面粗糙度测量装置设计与试验.农业机械学报,2010,41(1):68-72.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
装备机械(2019年4期)2019-12-26
模具制造(2019年4期)2019-06-24
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
中国新闻周刊(2017年23期)2017-07-12
中国机械工程(2017年12期)2017-07-03
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年12期)2017-02-02
中国高新技术企业(2015年25期)2015-07-24
