基于激光雷达技术的输电线路山火监测方法
2014-03-20 08:51陈锡阳尹创荣沈秀斌谢从珍
激光与红外 2014年11期
陈锡阳,杨 挺,尹创荣,沈秀斌,谢从珍,戴 栋,张 敏
(1.广东电网公司东莞供电局,广东东莞523000;2.华南理工大学电力学院,广东 广州510640)
假设气溶胶后向散射系数与消光系数之比取50,则有:
1 引言
近年来,受气候日益反常的影响、森林火险等级和次数的较大攀升,山火引发输电线路跳闸事故日益突出,严重影响到电网的安全稳定运行,越来越受到电网运行部门及科研工作者的关注、重视[1-2]。
为有效应对山火引发的大规模输电线路跳闸事故,目前,输电线路山火监测预警方法主要有图像识别法、卫星遥感地面热点法以及分布终端监测法等。这些方法已在各大电网上得到实际应用,初步实现了山火监测,取得了一定的预警效果。但受各方面条件的限制及方案本身的局限性,仍存在许多问题,其中图像识别法监测受视频监测设备性能和监测范围的限制;卫星遥感地面热点法受大气条件的影响,存在较大的误差、监测精度较低等缺点;而分布式终端监测法存在监测范围较窄、运行维护成本较高等缺点[3]。
随着激光技术、信号探测技术和数据采集及控制技术的发展,激光雷达在探测高度、空间分辨率、时间上的连续监测和测量精度方面具有独特的优势,与其他方法相比,激光雷达检测参数更多,目前,激光雷达广泛应用到激光传输、全球气候预测、气溶胶辐射以及大气环境监测等研究领域[4-6]。激光雷达在相关领域的应用为输电线路的山火监测与预警提供新的强有力手段。
2 激光雷达技术探测山火原理
山火发生过程中伴随着大量烟雾,其中烟雾粒径的大小可间接判断燃烧物质的种类;烟雾的浓度可判断燃烧物质的燃烧程度;烟雾的走向会随着风向的变化而变化,可以判断火势蔓延趋势以及蔓延的速度;烟雾的体积可以判断山火的燃烧范围等[7],因此根据烟雾的特征可以判断山火的燃烧特征。
激光雷达烟雾探测的基础是激光束与烟雾颗粒、大气分子之间相互作用,使激光雷达继续向前传播的能量和回波信号的能量或性质发生改变[8]。在输电线路通道区域发生山火时,物质的燃烧会伴随着大量烟雾,采用激光雷达技术探测山火的基本思想是根据山火烟雾颗粒对激光的散射作用,并通过激光雷达接收烟雾颗粒与激光束相互作用后散射回来的激光信号,通过光电倍增管将光信号转换为电信号[9],最后经过安装于计算机中的EV_LIDAR Explor软件进行数据处理,将接收到的信息显示于EV_LIDAR Explor软件窗口中,根据波形图中出现脉冲波形的位置信息,获取山火烟雾颗粒的浓度和引发山火的准确位置等信息,从而达到监测山火的目的。
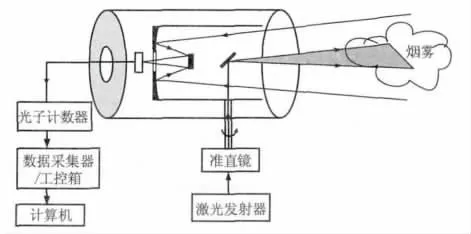
图1 激光雷达监测系统原理图
如图1所示,为激光雷达的原理图。激光器发出一束波长为λ0,宽度为τ的脉冲,经准直镜准直后射入大气,光脉冲在通过烟雾颗粒时受到散射和衰减,其后向散射光被接受面积为A(z)的望远镜系统接收,距离为z处的后向散射信号功率的激光雷达的方程为:

其中,P(z)为接收到的功率;z是观测点距离;P0为激光发射功率;c是光速;τ是脉宽;β(z)是后向散射系数;α(z)是消光系数;A(z)是接收机有效面积。
其中,β(z)和 α(z)是未知数。根据 Fernald法[10-12],在雷达方程中将空气分子散射和气溶胶散射分开来考虑。a表示烟雾气溶胶,m表示大气分子:

激光雷达方程提供了回波信号与被探测物的光学性质之间的函数关系,因此可以根据激光雷达探测到的回波信号,通过求解激光雷达方程来获得有关的气溶胶信息。由式2可知,激光雷达的方程有四个未知量:分子和气溶胶粒子后向散射系数βm(z)、βa(z)以及消光系数αm(z)、αa(z)。由于大气分子的散射比较稳定,其散射系数和消光系数可以通过标准的大气模型数据获得。激光雷达方程中,关于气溶胶的两个系数βa(z)、αa(z),可根据Fernald法计算得到。
设:

据以上两式可知,S2已知,S1的值需要假设。在实际应用中,在532 nm至1064 nm波长上,S1通常取40~50之间的数,这样便可计算得到气溶胶散射的散射系数βa(z)和消光系数αa(z)。在Mie散射模型中,散射系数βa(z)和消光系数αa(z)分别为(用来探测烟雾气溶胶的激光器波长,取λ=532 nm):

假设气溶胶后向散射系数与消光系数之比取50,则有:

通过激光雷达方程中的解散射系数βa(z)和消光系数αa(z)反演出气溶胶的相关信息。
3 实验及结果分析
为验证激光雷达系统能够有效对输电线路周围引发的山火进行监测,下面通过对距离监测装置560 m、460 m、360 m、260 m处的模拟山火烟雾进行监测,以验证激光雷达系统可用于输电线路走廊上山火的监测。?
3.1 实验场地
图2为进行激光雷达监测系统监测烟雾的实验场地。实验过程中,在距离监测点560 m处点燃木材模拟山火,并以100 m为步长向点火处靠近,对点火处的烟雾进行监测。
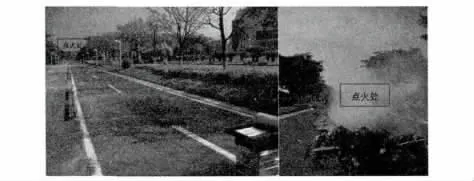
图2 实验场地
3.2 实验平台
图3 为已完成组装的整套激光雷达系统,主要由激光雷达、电动机、主机、工控箱、显示器、发电机组成。其中激光雷达包括激光套筒、激光发射器、滤光镜、光学接收器、光电倍增管、光子计数器组成;电动机是由控制激光套筒水平和垂直方向转动的两个电动机构成,目的在于使激光雷达系统能够在水平方向实现360°以及垂直方向实现90°的扫描。

图3 激光雷达系统
3.3 结果分析
在实验中,为了避免激光打到障碍物,影响实验结果,选取较为笔直的道路作为实验场地,如图2所示,通过燃烧木材产生大量烟雾模拟山火。首先,在距离激光雷达监测点560 m处点燃木材,打开安装于计算机中的EV_LIDAR Master软件,设置好激光套筒在水平及垂直方向扫描的范围,并通过两个电动机控制激光雷达系统3D扫描;并实时将工控箱采集到的数据传输至计算机,通过EV_LIDAR Explor软件进行数据处理后,实时将监测范围内的烟雾信息显示于EV_LIDAR Explor软件的窗口中。
如图4~7所示,因激光源发出的激光速度极快,导致工控箱不能及时采集到距离监测点30 m范围内的精确烟雾信息,所以该系统将距离监测点30 m的范围视为盲区,但不影响监测距离监测点30 m以外范围的烟雾信息。如图4所示,在距离监测点约为560 m处出现一个振幅较大的脉冲波形,表明在该处有大量的烟雾存在,使得发射出去的激光被大量的散射回来,在实际输电线路中可根据监测到明显的脉冲波形来推断该处具有山火存在。
以步长为100 m向点火处靠近,通过激光雷达在水平和垂直方向扫描,监测到在距离监测点460 m处有一个幅值脉冲波形,如图5所示,说明发射出去的激光在通过此处时被大量的散射回来,反映了在此处有大量的烟雾存在。同样以步长为100 m向点火处靠近,如图6、7所示,分别为在距离监测点360 m、260 m处的实验结果波形图,分别在距离监测点360 m、260 m处有一个振幅较大脉冲波形,可知在距离监测点处360 m、260 m处分别有大量烟雾存在。

图4 距监测点560 m处烟雾信息

图5 距监测点460 m处烟雾信息

图6 距监测点360 m处烟雾信息
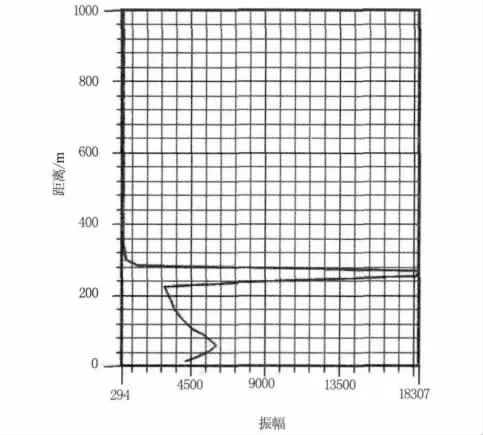
图7 距监测点260 m处烟雾信息
以上4组实验验证了采用激光雷达技术监测输电线路周边山火的有效性和可行性。通过上述4组实验发现,激光雷达系统可有效地、较大范围地监测输电线路周边引发山火,为输电线路的安全运行和维护提供及时有效的决策信息,进而提高整个输电网络的供电可靠性,降低输电通道的事故发生率。
4 结论
首先分析了现有山火监测方案存在的问题,阐述了基于激光雷达技术监测山火烟雾的原理,介绍了整套实验装置的构成,并通过做实验得到实验数据,说明了激光雷达用于监测输电线路周边的山火具有一定的可行性和有效性。通过计算机处理数据,并将实验结果波形显示于EV_LIDAR Explor软件窗口,通过波形分析可知,该监测装置可较宽范围、较高精度地对输电线路通道上引发的山火进行监测及预警。根据以上研究得出以下结论:
(1)通过理论分析,说明了目前用于环境监测的激光雷达系统可以用于输电线路周围引发的山火。
(2)通过实验研究,验证了激光雷达系统监测输电线路周围引发的山火具有一定的可行性和有效性。
[1] LIXiang.Discussion on prevention measures of fire fault in transmission line[J].China Electric Power Education,2009,S1:240.(in Chinese)李享.浅议输电线路防山火故障措施[J].中国电力教育,2009,S1:240.
[2] HUANG Le,SHU Shuangyan.Analysis on fault trips caused by forest in CSG in the first quarter of year 2010[J].Guangdong Electric Power,2011,24(3):95 - 97.(in Chinese)黄乐,舒双燕.南方电网2010年第一季度线路山火跳闸情况分析[J].广东电力,2011,24(3):95 -97.
[3] QIN Xianlin.Study on forest fire early warning and monitoring methodology using remote sensing and geography information system techniques[D].Chinese Academy of Forestry,2005.8.(in Chinese)覃先林.遥感与地理信息系统技术相结合的林火预警方法的研究[D].中国林业科学研究院,2005.8.
[4] MA Yingying,GONGWei,ZHU Zhongmin.Aerosol optical characteristics in south east China determined using spaceborne lidar[J].Journal of Remote Sensing,2009,13(4):715 -722.(in Chinese)马盈盈,龚威,朱忠敏.中国东南部地区气溶胶光学特性激光雷达探测[J].遥感学报,2009,13(4):715-722.
[5] ZHANG Jinye.Study of tropospheric aerosols over wuhan based on a Raman/Mie lidar[D].Wuhan:Wuhan University,2010.(in Chinese)张金业.武汉上空对流层大气气溶胶Raman/Mie激光雷达探测研究[D].武汉:武汉大学,2010.
[6] WANG Jianyu,HONG Guanglie.Technologies and applications of laser active remote sensing[J].Laser & Infrared,2006,36(S1):742 -748.(in Chinese)王建宇,洪光烈.激光主动遥感技术及其应用[J].激光与红外,2006,36(S1):742 -748.
[7] HE Fang,ZHA Jianwen,WANG Lihong,et al.Particle models of biomass combustion[J].Fire Safety Science,2011,20(4):193 -199.(in Chinese)何芳,闸建文,王丽红,等.生物质燃烧过程颗粒模型现状分析[J].火灾科学,2011,20(4):193 -199.
[8] LIU Jun.Study of the lidar techniques for remote sensing of the atmospheric temperature and aerosol profiles[D].Xi'an:Xi'an University of Technology,2008.(in Chinese)刘君.大气温度及气溶胶激光雷达探测技术研究[D].西安:西安理工大学,2008.
[9] HE Linyan.Study of backscattering of lidar[J].Journal of Meteorologi- cal Research and Application,2009,30(1):198 -200.(in Chinese)何林宴.激光雷达后向散射研究[J].气象研究与应用,2009,30(1):198 -200.
[10] MAO Feiyue,GONG Wei,LI Jun,et al.Cloud detection and parameter retrieval based on improved differential zero - crossing method for Mie lidar[J].Acta Optica Sinica,2010,30(11):3097 -3102.(in Chinese)毛飞跃,龚威,李俊,等.基于改进微分零交叉法的米氏散射激光雷达云检测与参数反演[J].光学学报,2010,30(11):3097 -3102.
[11] LE Lei,WU Songhua,CHEN Yubao,et al.Doppler lidar observation of aerosols over Beijing during spring 2011[J].Chinese Journal of Quantum Electronics,2013,30(1):46 -51.(in Chinese)靳磊,吴松华,陈玉宝,等.基于多普勒激光雷达的2011年春季北京地区气溶胶探测实验分析[J].量子电子学报,2013,30(1):46 -51.
[12] Tian Fei,Luo Jia,Hu Daping,et al.Inversion algorithm for slant visibility based on lidar technique[J].Laser &Infrared,2012,42(11):1239 -1243.(in Chinese)田飞,罗佳,胡大平,等.激光雷达观测斜程能见度反演方法[J].激光与红外,2012,42(11):1239 -1243.
猜你喜欢
物理学报(2022年22期)2022-12-05
海洋技术学报(2020年3期)2020-08-19
辐射防护通讯(2019年3期)2019-04-26
四川环境(2019年6期)2019-03-04
消防界(电子版)(2018年15期)2018-08-29
高原山地气象研究(2016年2期)2016-11-10
环球时报(2016-07-14)2016-07-14
沙漠与绿洲气象(2014年1期)2014-03-20
延安大学学报(自然科学版)(2014年4期)2014-03-13
延安大学学报(自然科学版)(2014年4期)2014-03-13