
A Review of Short-term Prediction Techniques for Ship Motions in Seaway
2014-03-16 08:14:20HUANGLiminDUANWenyangHANYangCHENYunSai
船舶力学 2014年12期
HUANG Li-min,DUAN Wen-yang,HAN Yang,CHEN Yun-Sai
(College of Shipbuilding Engineering,Harbin Engineering University,Harbin 150001,China)
1 Introduction
Six degrees of freedom ship swaying motions occur through lifetime due to the ocean environmental disturbances including sea waves,wind and ocean current,etc.,which are dangerous in ship related maritime operations such as aircraft landing in carriers,ship-borne helicopter recovery,float over,launch and recovery of submarines,and cargo transfer between ships,and so on,especially in harsh conditions.
First studies on ship motion prediction were based on the analysis of ship motion records.And of course data obtained along hours provide information on sea state,in terms of statistical parameters including probability distribution,mean,deviation,etc.However,the more important thing is to forecast the ship motions 5 to 10 seconds ahead of time.As it is very useful for the above offshore operations in both operational safety and efficiency aspects.For example,the prediction information is critical in the motion compensation which may prevent crash of cargo in cargo transfer,improving the fire accuracy of the ship-borne weapon systems and performance of the motion control systems.Besides,another important application of ship motion prediction is to extend the operational limits by forecasting the quiescent periods where the ship motions are within acceptable limits to perform a desire maritime activity.Classical prediction approaches employ statistical data to assess whether a task can be exe-cuted,and at present ship motions are estimated through human observation.However,this may result in the outcome that an operation is never executed,whereas quiescent periods do exist.
In this paper,definitions of short term,middle term and long term prediction of ship motions are distinguished in Section 2 while Section 3 gives the various classifications of shortterm prediction techniques for ship motions.In Section 4,development of short-term prediction methods are reviewed and assessments on prediction approaches are made.Finally,concluding remarks and recommendations are given in Section 5.
2 Definition of short-term prediction of ship motion
Generally,ship motion prediction includes long term prediction,middle term prediction and short term prediction with various prediction durations,applications and prediction approaches.The long term prediction is also designated as the design limits prediction[1]forecasting the possible extreme responses encountered in few months,years or even the entire life time of the ship using fluid dynamic theory and statistical means.Similar to the pre-mentioned long term prediction,middle term prediction uses fluid dynamic techniques like strip theory,2D+t,three dimensions potential theory,and probability analysis to forecast the response characteristics including the significant values,slamming times and green water possibility,and so forth.Long term prediction is mainly employed in the preliminary design while the middle term prediction is more widely applied in the optimal design and understanding of ship’s performance in the ocean waves.
Fig.1 Cargo transfer[2]

Fig.2 Launch and recovery of Rigid Hulled Inflatable Boats[2]
Unlike long term and middle term prediction of the ship motion,the short term prediction adopts information on what the ship is doing right now and what it has been doing in the recent past to forecast what it may be doing in the very near future using short term prediction theories consisting of time series analysis,nonlinear system identification theory and artificial intelligent methods.With various applications from long term and middle term prediction,short term prediction is always used in compensation control and decision making for the maritime special operations such as cargo transfer between ships(as shown in Fig.1),the launch and recovery operation of Rigid Hulled Inflatable Boats(RHIBs),submarines and ship-borne helicopters(as shown in Figs.2-4,respectively),floater motion to assist motion critical offshore operations and platforms,LNG-offloading connect,automatic UAV landing,etc.

Fig.3 Launch and recovery of submarine[2]
Fig.4 Launch and recovery of ship-borne helicopter[2]
3 Categorization and difficulties in the short-term prediction of ship motion
Short term prediction of the ship motion is widely studied for its great engineering application value,so far,enormous number of forecast models have been studied,where some of them were already carried out in marine trial.Traditionally,the short term prediction models are simply categorized into frequency domain methods and time domain methods[3].This categorization method failed to describe prediction models concern with both frequency domain and time domain aspects.Therefore,new classifications of short-term prediction techniques according to the characteristics of ship response and prediction theories are introduced.
The first solution for classification is to summarize the short term prediction models into four kinds of prediction theories including linear prediction theory,nonlinear prediction theory,intelligent prediction theory and hybrid prediction theory according to differences of their theoretical categories.Among approaches mostly used in short-term prediction study,Autoregressive(AR)model and Kalman filter are involved in linear prediction theory,while wavelet analysis based and chaotic theory based prediction models belong to nonlinear prediction theory.Intelligent prediction theory usually includes artificial neural network(ANN),support vector regression(SVR),etc.And hybrid prediction theory consists of coupled forecast models such as empirical mode decomposition based radial basis function neural network(EMD-RBFNN),empirical mode decomposition based least mean square support vector machines(EMDLMSSVM),empirical mode decomposition based autoregressive(EMD-AR)model,and so on.
Based on the differences of mathematical tools applied in prediction models,the second way for categorization divides the prediction methods into two categories.One category is classic statistical theory,calculus and methods of mathematical physics based prediction techniques containing classic time series analysis models,Kalman filter,minor component analysis(MCA)prediction model,etc.Another category is prediction models where the very recent developed techniques are used,including wavelet theory related prediction method,artificial neural network prediction model and its extensions.
Besides,the basis of different modeling principles,the third approach for classifying the short term prediction models is to categorize them into three types of models:hydrodynamic based prediction models,classical time series prediction models and nonlinear and artificial theories based on short term prediction models.In this point of view,convolution predictor and Kalman filter are included in hydrodynamic based prediction models.And for classical time series prediction models,AR model,ARMA model and ARIMA model etc.are included.Nonlinear and artificial theories based on short term prediction models is likely to conclude artificial neural network(ANN),fuzzy theory related prediction models and chaotic theory based on prediction models.
The final feasible categorization method is depending on the foundation of the signal characteristics existing in ship motion time history.In general,characteristic natures to describe a stochastic process including stationarity,non-stationarity,linearity and non-linearity.Prediction methods are concluded into four categories:stationary and linear prediction methods,stationary and nonlinear prediction methods,non-stationary and linear prediction models,nonstationary and nonlinear prediction methods.Details of each category are shown in Fig.5.
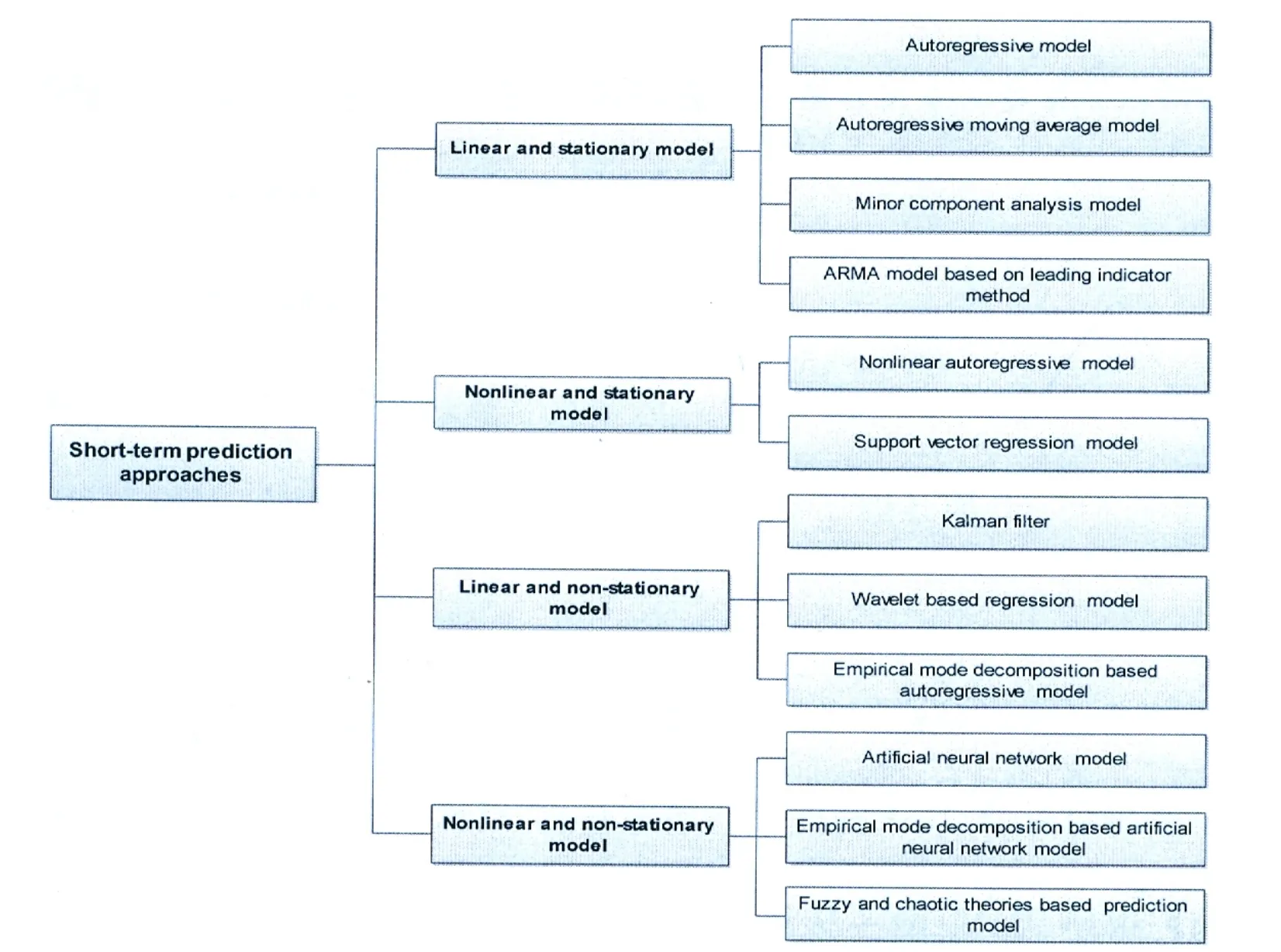
Fig.5 Classification of short-term prediction approaches
4 Development of short-term prediction methods for ship motions
Short term prediction of the ship motion was widely studied for its great engineering application value in the past decades,so far,enormous number of forecast models had been studied,where some of them were already carried out to marine trial.
4.1 Hydrodynamic based predictor
The early efforts on short term prediction were related to hydrodynamics.Kaplan(1965)[4]developed a predictor by using the wave height measurements at the bow serving as input data which was then convoluted with the ship response kernel function to obtain the motion estimation in the coming seconds.Whereas,the ship response kernel function was derived out under the consumption of linear hydrodynamic theory.However,accurate response function and wave inputs are necessary to ensure desired prediction accuracy,which are always limited in engineering application.Later in(Kaplan,1969),the Wiener filter was proposed for linear prediction of ship motions[5],which estimated the prediction results depending on statistical parameters like ship motion power spectral densities.It was successfully applied to a carrier,obtaining 5~6 seconds of prediction horizon.But the implementation was complicated and the time was consumed.
Short term prediction using state-space approaches has been studied in a considerable number of papers.Triantafyllou et al(1981;1982;1983)addressed Kalman filtering techniques[6-8]for the prediction of six-degree-freedom motions using a precise state-space model.Numerical simulation results of DD-963 destroyer show that the prediction precision of Kalman filter greatly depends on the ocean wave frequencies,and estimation results of 8-10 seconds advance obtained for the roll while 5 seconds with respect to pitch without noise condition.On the contrast,for the noise condition,prediction horizon can reach 6-8 seconds for roll and 2-3 seconds with respect to pitch.However,Kalman filter is still difficult to be applied to forecast ship motions in the real world for its shortcomings.First of all,accurate state-space equations and noise statistics are necessary in implementing Kalman filter,which are hard to obtain in the real engineering problems.Besides,tremendous computational efforts required to solve the ship hydrodynamic coefficients for the state-space equations,result in difficulty to real time implementation.
4.2 Classical time series prediction model
Time series analysis is another possible solution accomplishing the short term prediction of ship motions,which only requires time history of the ship motions or with ocean waves for modeling.Practical limitations of requiring accurate state-space and noise estimation in the Kalman filter and precise response kernel function in the convolution predictor are avoided.
There are three classic time series models for short term prediction,i.e.autoregressive(AR)model,moving average(MA)model and autoregressive moving average(ARMA)model.Among these models,AR model has been widely studied in a large number of papers for its advantages:low computation cost,convenient in real-time identification,high adaptive nature.Research works involving identification techniques for determining the model order and estimating the corresponding coefficients have been extensively surveyed.For order determination of AR model,Akaike Information Criterion(AIC)is the mostly adopted way for this problem,however,the prediction performance was not always satisfied.To improve the performance of AR model,Peng et al(2006)[9]developed an order selection technique based on corner condition,and simulation results showed that the computational complexity was shortcut with the prediction precision increased more than AR algorithm according to AIC criterion order selection.There are many algorithms for parameter estimation of AR model,such as recursive least square(RLS)[10-11]algorithm,lattice recursive least square(LRLS)algorithm[12],etc.
AR model shows good prediction performance in stationary process,however,prediction accuracy in non-stationary and non-linear situation is out of expectation.To improve the prediction performance,Yumori(1981)[13]developed a novel ARMA model based on leading indicator method using a statistical way that finds a time domain model which best fits an input wave sensor time history to the ship response time history.It showed good predictions of phase and amplitude for 2 to 4 seconds in advance and phase for 8 to 10 seconds in 8 second waves.Simulation results by Zhao(2003)[14]using ship model testing data showed that ARMA model performances were better than AR model in prediction accuracy.But satisfactory prediction results only are obtained if it can sense waves at a distance from the ship which is not always available in the real situation.
Among classic time series forecast models,linear prediction models are mostly focused for advantages like less computational complexity and memory demands,convenient for real-time realization.However,prediction results are far from expected in harsh sea conditions and the real motions of the ship and ocean waves are always non-stationary that conflicts with the stationary assumptions in time series analysis models.
4.3 Nonlinear and intelligent based prediction model
To overcome the nonlinearity and non-stationarity involved in the real-life ship motions,nonlinear theory and artificial intelligent identification methods are employed to short term prediction.
Zhou and Zhao[15]proposed a nonlinear linear autoregressive(NAR)model by using Orthogonalization to identify NAR model,and multi-step forward prediction was also derived.Simulation results of NAR model showed better prediction precision than AR model.
Artificial neural network(ANN)is widely preferred in processing non-linear and non-stationary problem for its intelligent ability.Investigations into the application of artificial neural network methods for short term prediction of ship motion by Khan[16]show that the artificial neural network produces excellent predictions and the ship motion may be satisfactorily predicted for up to 7 seconds.Aiming at making good prediction for non-stationry and non-linear ship motion,Weng et al[17]addressed a prediction technique based on second-order adaptive Volterra series.Further,to deal with the chaos characteristic in the ship motion,prediction model based on chaotic time series theory and radial basis function(RBF)artificial neural net-work are implemented for short term prediction[18].Simulation results show that it is able to predict ship motion acceptably up to 10 seconds with a precision rate of 85%.
Though the above nonlinear and intelligent models perform well in data fitting,their applications in real engineering problem are still constrained because of disadvantages such as high computational cost,demanding substantial samples,non-adaptive in model identification,and so forth.
Hybrid estimation methods are possible solutions,and attempts are carried out.In which,empirical mode decomposition[19](EMD)method was widely used to be coupled with various prediction models.Zhou et al[20]invented an empirical mode decomposition method(EMD)based on least mean square support vector machines(LSSVM)for the prediction issue.In previous study,Hou et al[21]developed an empirical mode decomposition based on radial basis function neural network(EMD-RBFNN)model to deal with the nonlinearity and non-stationarity of the ship swaying motions.But further research works in adaptive algorithms for radial function determination are still needed.Compared with the above hybrid prediction models,empirical mode decomposition autoregressive(EMD-AR)model proposed by Duan et al[22]required less computational complexity with better adaptation.Non-stationary and nonlinear characteristics of the ship motion are overcome thorough adaptive empirical mode decomposition,where simple intrinsic mode functions(IMFs)produced.After that,each component is predicted by a fitting AR model.But for all EMD based on prediction models,end effects in real-time EMD algorithm are major challenges.
5 Conclusions and recommendations
A review of short term prediction has been presented.Firstly,differences between short term prediction and traditional prediction of ship motions were distinguished.Then application and categorization of the short term were then introduced.Development and research challenges of short-term prediction techniques were discussed in detail.
Linear system theory based on prediction approaches are always easy to operate,demanding low computation cost and convenient for real-time identification.However,their prediction performances are not satisfactory,especially for non-linear and non-stationary ship motions.Nonlinear and intelligent theories based on the prediction methods show good predictions for nonlinear and non-stationary ship motions when the training data are sufficient.But it is still difficult for real-time/on-line implementation of those prediction techniques as large computational complexities are involved and selection of the model parameters is not always adaptive.Therefore,Efficiency,adaptation and accuracy of non-stationary and nonlinear prediction techniques for ship motions are the key parts of future research.
Acknowledgement
This work was financially supported by he National Natural Science Foundation of China(No.11272097).
[1]Shen Zhenbang,Liu Yingzhong.Theory of ship[M].Shanghai:Shanghai Jiao Tong University Press,2004:337-450.
[2]Henry G,Cox I,Crossland P,Duncan J.Virtual ships:NATO standards development and implementation[C].United Kingdom,2009:1-16.
[3]Zhao Xiren,Peng Xiuyan,Shen Yan,Xie Meiping.Study status quo of extremely short-time modeling and predicting of ship motion[J].Ship Engineering,2002:4-8.
[4]Kaplan P,Sargent T P.A preliminary study of prediction techniques for aircraft carrier motions at sea[J].Oceanics,Inc.Rpt.,1965:65-23.
[5]Kaplan P.A study of prediction techniques for aircraft carrier motions at sea[J].Journal of Hydronautics,1969,3(3):121-131.
[6]TriantafyIlou M,Athans M.Real time estimation of the heaving and pitching motions of a ship using a Kalman filter[C]//Proc.Oceanics 81,Sept 1981.Boston MA,1981.
[7]TriantafylIou M.and Bodson M.Real time prediction of marine vessel motion using Kalman filtering techniques[C]//Proc.OTC.Houston,Texas,1982.
[8]TriantafylIou M,Athans M.Real time estimation of motions of a destroyer using KaIman filtering techniques[R].Laboratory for Information and Decision Systems Rep,MIT Cambridge,1983.
[9]Peng Xiuyan,Zhao Xiren,Xu Linlin.Real-time prediction algorithm research of ship attitude motion based on order selection with corner condition[C]//1st International Symposium on Systems and Control in Aerospace and Astronautics(ISSCAA),IEEE.Harbin,2006:1070-1075.
[10]Yang Xilin.Displacement motion prediction of a landing deck for recovery operations of rotary UAVs[J].International Journal of Control,Automation,and Systems,2013,11(1):58-64.
[11]Peng Xiuyan,Zhao Xiren,Gao Qifen.Research on real-time prediction algorithm of ship attitude motion[J].Journal of System Simulation,2007,19(2):268-271.
[12]Peng Xiuyan,Liu Changde.Extreme short time prediction of ship motion based on lattice recursive least square[J].Journal of Ship Mechanics,2012,16(1-2):44-51.
[13]Yumori I R.Real time prediction of ship response to ocean waves using time series analysis[C].IEEE Oceans,1981.
[14]Zhao Xiren,Peng Xiuyan,Lu Suping,Wei Naxin.Extreme short prediction of big ship motion having wave survey[J].Journal of Ship Mechanics,2003,7(2):39-44.
[15]Zhou Shuqiu,Zhao Xiren.A nonlinear method of extreme short time prediction for warship motions at sea[J].Journal of Harbin Engineering University,1992,17(4):1-7.
[16]Khan A,Bil C,Marion K E.Ship motion prediction for launch and recovery of air vehicles[J].OCEANS,2005,Proceeding of MTS/IEEE,2005,3:2795-2801.
[17]Weng Zhenping,Gu Min,Liu Changde.Extreme short-term prediction of ship motion based on second-order adaptive Volterra series[J].Journal of Ship Mechanics,2010,14(7):732-740.
[18]Gu Min,Liu Changde,Zhang Jinfeng.Extreme short-term prediction of ship motion based on chaotic theory and RBF neural network[J].Journal of Ship Mechanics,2013,17(10):1147-1152.
[19]Huang N E,Shen Z,Long S,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis[J].Proceedings of the Royal Society of London Series A,1998,454:903-995.
[20]Zhoubo,Shi Aiguo.Empirical mode decomposition based LSSVM for ship motion prediction[J].Advance in Neural Networks.Lecture Notes in Computer Science.2013,7951:319-325.
[21]Hou Jianjun,Qi Yansheng.On the prediction in time domain of ship non-stationary swaying motions[C]//Proceedings of International Conference on Information Technology and Computer Science.New York,2011:230-234.
[22]Duan Wenyang,Huang Limin,et al.EMD-AR based short-term prediction model for non-stationary ship motions[J].Journal of Harbin Engineering University,2014.(Submitted)
- 船舶力学的其它文章
- 《船舶力学》稿约须知
- 总目次(2014年)
- Cabin Noise Control on Large Oil Tankers
- Influence of Rotation Direction of Impeller on Noise Performance of Waterjet
- Research on the Design of Hull Crashworthiness Structure based on Sandwich Plate System
- Influence of Stress Wave on Dynamics Damage Character of Ship-build Low-carbon Steel Based on Low-velocity Taylor Impact Bar