无刷直流电机单片机控制调速系统设计
2014-03-16 09:26南通工贸技师学院
电子世界 2014年9期
南通工贸技师学院 顾 剑
1.引言
传统的无刷直流电动机控制系统一般由分立的模拟器件构成。模拟控制系统使用方便,价格便宜,应用广泛。但是,模拟器件也有本质的缺陷:元器件特征参数受温度影响;器件的老化:不便于维护、无法升级。随着微处理器性能的不断提高.以其为核心的数字控制系统正逐渐应用于无刷直流电动机的控制,并取得了非常好的效果。它终将取代模拟控制系统。AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K在系统可编程Flash存储器。使用Atmel公司高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单片机上,拥有灵巧的8位CPU和在系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。本文设计了以AT89S52单片机和无刷直流电机专用控制芯片LM621为核心的控制系统,实现对无刷直流电机的调速控制。
2.单片机控制电路设计
单片机系统模块包括单片机芯片、单片机I/O口线扩展的独立接口以及单片机的复位电路和晶振电路。
2.1 单片机的复位方式与复位电路
复位是单片机的初始化操作,除了进入系统的正常初始化之外,当由于程序运行出错或操作使系统处于死锁状态,为摆脱困境,也需要按复位键以重新启动。AT89S52芯片的第9脚RESET是复位信号的输入端,复位信号时高电平有效,有效时间应该持续2个机器周期以上,若使用频率为12MHz的晶振,则复位信号持续时间应超过2us才能完成复位操作。
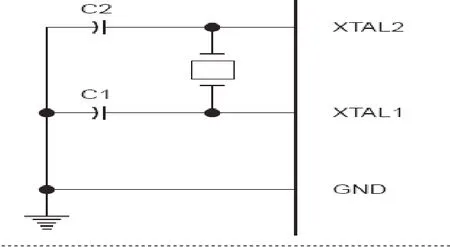
图1 单片机时钟电路内部方
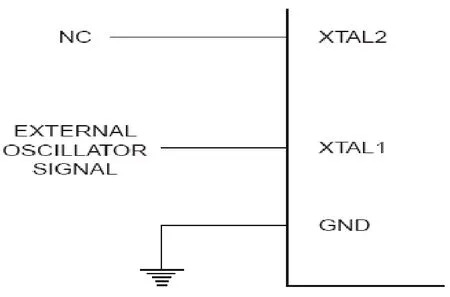
图2 单片机时钟电路外部方式
2.2 单片机的时钟电路
时钟是时序的基础,AT89S52片内由一个反相放大器构成振荡器,可以由它产生时钟,时钟可以由两种方式产生,即内部方式和外部方式,具体如图1和图2所示。
内部方式:在XTAL1和XTAL2端外接石英晶体作定时元件,内部反相放大器自激振荡产生时钟。时钟发生器对振荡脉冲2分频,即若石英频率f=12MHz,则时钟频率为6MHz。
外部方式:XTAL2可以不接,从XTAL1接入外部时钟。
3.无刷直流电机控制专用集成电路设计
由于无刷直流电机需要不断的换相,才能使电动机持续转动下去。如果通过单片机来换相,而且单片机还要监视用户界面,控制调速和转向操作,这样,单片机的负担较重。但是使用专用集成电路可以大大减轻单片机工作,腾出时间进行通讯、检测、故障诊断等其他工作。
用于无刷直流电动机的专用集成电路芯片有很多种,它们大多是针对有霍尔式位置传感器的三相无刷直流电动机而设计的。它们多数具有换相功能、PWM调速功能,转向控制功能、制动控制功能、电动机相数和工作方式选择功能、保护功能、(如限流保护、欠压保护、过热保护等)。有些芯片还集成了驱动电路,可以方便地驱动小功率无刷直流电动机。本设计中使用的专用集成电路芯片是LM621。图3所示是基于LM621芯片所设计的硬件电路图。

图3 LM621芯片集成电路
(1)LM621控制电路和驱动电路
LM621外接电路如图3所示,其中5、6、7引脚接传感器。电机驱动电路由6只开关速度快、损耗低、驱动功率小的MOSFET管构成,3只P沟道的MOSFET管V1,V3,V5构成上桥臂,低电平导通,3只N沟道的MOSFET管V2,V4,V6构成下桥臂,高电平导通。由于LM621芯片可以直接驱动MOSFET管,因此,可将其16、15、14引脚接至上桥臂V1、V3、V5的栅极,13、12、12引脚接至下桥臂V4、V6、V2的栅极。上桥臂MOSFET管型号为IRF9640,下桥臂MOSFET管型号为IRF630。由于LM621内部设计有自动换相电路,MOSFET全桥的控制变得非常简单,可以完全由LM621自动完成,因此在设计单片机软件时无需考虑换相问题。
(2)限流电路
与普通的直流电动机一样,在无刷直流电动机启动时,由于转速较低,转子磁通切割定子绕组所产生的反电动势很小,可能产生过大的电流,因此,必须加限流电路,如图6所示。主回路中流过无刷直流电动机三相定子绕组的电流最终通过电阻R接地,因此电阻上的压降正比于电动机电流,当此电阻上的压降大于比较器LM324的正端给定电位U时,比较器输出低电平,从而使与非门74LS00输出高电平,于是LM621封锁输出,起到限流保护作用。当压降小于U时,限流电路不起任何作用。
4.单片机与LM621芯片控制集成电路的连接
电路连接说明:AT89S52单片机将PWM功能定向到P1.0引脚,通过与非门和LM621对电动机进行调速控制。另外,通过P1.1引脚来控制电动机的转向。由于大部分控制工作交给了LM621完成,单片机只在调速和改变转向时才进行干预,所以单片机可以有十分从足的时间做其他工作。
5.电机调速系统设计
5.1 电机的转向控制
本设计是基于无刷直流电机专用控制芯片LM621设计的,LM621的2号引脚是转向控制端,由施加的电平决定,因此设计思路是将单片机的P1.0口与LM621的2号引脚连接起来,然后编写程序,通过对P1.0口施加高低电平,从而达到控制电机转向的目的。
5.2 电机的调速设计
直流电机由于具有速度控制容易,启动、制动性能良好,平滑调速范围宽等特点,在冶金、机械制造、轻工等工业部门中得到广泛应用。直流电动机的调速有改变电枢电压U调速、改变电枢回路串接附加电阻R调速及改变主磁通Φ调速等三种方法。改变电枢回路串接附加电阻调速方法,调速电阻将消耗大量的电能,使电动机的效率下降,而且由于调速电阻不能连续变化,使得调速不平滑,难以实现无级调速。改变主磁通Φ调速方法,低速时受磁极饱和的限制,高速时受换向器结构强度及其换向火花的限制,并且励磁线圈电感较大,动态响应较差。所以这两种调速方法用得较少。目前,大多数应用场合都使用改变电枢电压U调速,随着电力电子技术的进步,发展了许多新的电枢电压控制方法,其中PWM(脉宽调制)是常用的一种调速方法。因此,本文提出利用单片机产生PWM信号的软件实现方法。
LM621可以直接与外部PWM信号连接,因此可以直接通过编程生成所需要的PWM信号,从而达到调速的目的。
5.2.1 PWM基本原理
PWM基本原理是通过控制固定电压的直流电源开关频率,从而改变电机电枢的电压,进而达到控制要求的一种调速方法。在脉宽调速系统中,按照一定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”的时间,通过改变电枢上平均电压的大小,从而控制电动机的转速。PWM调制的原理如图4所示。
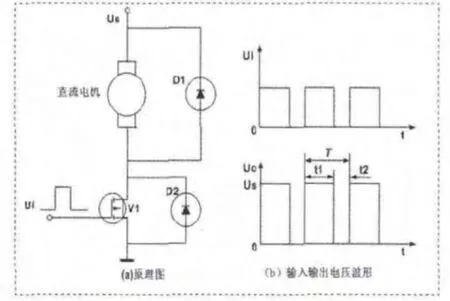
图4 PWM调制原理与输入输出波形图
通过PWM来控制电机电压时,电动机的电枢绕组两端的平均电压Uo为:
Uo=(t1Us+0)/(t1+t2)=t1Us/T=αUs
式中α为占空比,α=t1/T。t1开关器件导通的时间,T为脉宽调制PWM的周期。占空比α表示了在一个周期T中,开关管导通的时间与周期的比值即t1/T。α的变化范围为0≤α≤1。当电源电压US不变的情况下,电枢端电压oU的平均值取决于占空比α的大小,改变α的值就可以改变端电压的平均值。
5.2.2 PWM信号软件实现方法
占空比是直流电机PWM调速的关键,对如何产生PWM信号有效控制开关管的导通与截止具有重要的意义。最近几年来,随着单片机技术的广泛应用,使直流电机PWM调速装置向集成化、小型化和智能化方向发展。目前利用单片机进行PWM控制,PWM信号的产生有两种方法:一种是软件的方法;另一种是硬件的方法。硬件方法的实现已有很多文章介绍,这里不做叙述,本文主要介绍通过软件实现的方法。
软件的基本思想:单片机的定时器工作方式选择方式3,每200us产生一次溢出,溢出后,调用中断子程序,判断所设定的COUNTER是否小于等于设定的PWM值,如果小于等于PWM的值,P1.0口输出高电平,否则输出低电平,从而产生高低电平的脉冲,改变PWM的值,便可以改变脉冲的宽度,从而达到调速的目的。
6.结论
本设计在学习了无刷直流电机控制领域相关资料的基础上,设计了以AT89S52单片,无刷直流电机控制专用芯片LM621为核心的无刷直流电机调速控制系统,控制系统的功率开关电路以IRF630和IRF9640构成的,电机使用的是三相无刷直流电机,其型号为42BLF01。经过多次调试,系统可以良好运行,但仍然存在一些不足之处:(1)硬件电路中的功率开关电路会产生大量的热量,对硬件电路有很大的影响。(2)电机在运行时,有一点失步。(3)本设计中软件部分还不够完美,以上不足之处由于时间的原因,未能彻底解决,希望以后有时间能将这些不足之处一一解决,以便使本控制系统的运行更加稳定。
[1]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[2]张琛.直流无刷电动机原理及应用(第2版)[M].北京:机械工业出版社,2004.
[3]王晓明.电动机的单片机的控制[M].北京:北京航空航天大学出版社,2002.
[4]张强,吴红星,谢宗武.基于单片机的电动机控制技术[M].北京:中国电力出版,2008.
[5]吴泽民,王俊,王景.利用单片机产生PWM信号的软件实现方法[J].机电技术,2008,1.
[6]王兆安,黄俊.电力电子技术(第四版)[M].北京:机械工业出版社,2006.
[7]谭建成.电机控制专用集成电路[M].北京:机械工业出版社,1997.
[8]康维新.MCS-51单片机原理与应用[M].北京:中国轻工业出版社,2009.
[9]康华光.电子技术基础(第五版)[M].北京:高等教育出版社,2006.
[10]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006.
[11]Takeshita T.,Matsui N.Sensorless brushless DC motor drive with EMF constant identifier.20th Intenrational Conference on Industrial Electronics,Control and Instrumentation,1994,Vol.1 1994:14-19.
[12]Ogasawara S.,Akagi H.An approach to position sensorless drive for brushless DC motors[J].IEEE Transactions on Industry Applications,Vol.27 Issue:5,Sept.-Oct.1991:928-933.
猜你喜欢
大电机技术(2022年5期)2022-11-17
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
汽车实用技术(2022年12期)2022-07-05
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2017年1期)2017-05-17
数学大王·中高年级(2017年2期)2017-02-08