
车辆转矩协调控制系统的仿真分析
2014-03-16 05:51德州学院汽车工程学院
电子世界 2014年7期
德州学院汽车工程学院 张 亮
1.引言
转向驱动力转矩分配系统是在分析了车辆转向时转矩协调对车辆纵向动力学和侧向动力学的基础上,使用一定的控制方法,实现驱动转矩协调策略,在车辆行驶时,根据不同的转向条件,重新分配左右轮之间的驱动力,同时使左右轮转速不一致,使车辆在转向行驶时,能够很好地控制其运动,使其沿预定轨迹稳定地转向,同时减少车辆转向时转向盘操作负荷,提高车辆的转向性能,从而提高车辆的转向稳定性。
2.转矩协调对车辆动力学的影响
2.1 转矩协调对车辆纵向动力学的影响
具有2个自由度的的车辆模型如图1所示,其动力学方程可描述为:
Fy1+Fy2=may
Fy1a-Fy2b=Izγ
式中Fy1、Fy2分别为前、后轮的侧偏力;m为汽车质量;ay为汽车质心侧向加速度;Iz为汽车绕质心的转动惯量;γ为汽车的横摆角速度。
由式(1)、(2)可以看出,Fy1、Fy2之和等于may,但二者数值大小的分配原则取决于Izγ的大小。稳态转向条件下,Fy1越大,Fy2越小。通过转矩协调策略,增加一横摆力矩,如图1(b)所示,增大后外轮作用力Fx21,减小后内轮作用力Fx22,则车辆力矩平衡方程为:
Fy1a+(Fx21-Fx22)B/2-Fy2b=0
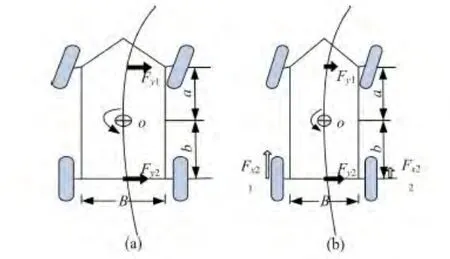
图1 稳态转向行驶时汽车的力平衡图
显然,此时Fy1减小,Fy2增大,相应的前轮侧偏角α1减小,后轮侧偏角α2增大,则汽车的不足转向量减小,改变了车辆的稳态转向特性。当车辆在接近极限工况时,随着Fy1的减小,还给前轮创造了一个提供更大驱动力Fx的空间,使得汽车有更好的动力性,如图2所示。由于载荷转移的影响,前内轮首先达到附着极限,这时由于前内轮侧向力减小,则纵向力增大的空间变大。

图2 前轮受力变化比较
2.2 转矩协调对车辆侧向动力学的影响
在传统车辆中,通过方向盘转角的变化来改变车辆的方向。发动机的驱动转矩在左、右轮的分配相等,纵向力仅仅作为驱动力矩。转矩协调分配系统利用驱动转矩产生控制横摆力矩,可以提高车辆转弯加速的不足转向的极限,并且车辆的操纵性得到极大提高。
车辆在转向行驶工况下,由于垂直载荷的影响,在驱动力达到极限时,内侧驱动车轮的转向力为零,仅外侧车轮提供转向力。在独立驱动系统中,转矩协调系统可以减小内侧内轮转矩、增大外轮驱动转矩。由图3可以看出驱动力比例的范围和内外轮的转向力的变化趋势。在与传统车辆相同的总的纵向力情况下,转矩协调系统可以选择最优的转矩分配比例,使得转向力最大,保证车辆在转弯时具有更好的弯道动力性能,提高车辆的稳定性。

图3 内外轮的转向力的变化图
3.转矩协调控制仿真及结果分析
3.1 仿真模型的建立
整车模型的建立不考虑车辆坐标系的z轴的垂直运动,仅考虑车辆的x轴的纵向运动、y轴的侧向运动、绕z轴的横摆以及4个车轮的回转运动4个自由度,如图4所示。仿真参数如下:整车质量m为1200kg;整车绕z轴的转动惯量Iz为1546kg·m2;车轮转动惯量Iw为0.4892kg·m2;车宽B为1.36m;前轴到质心的距离a为1.016m;后轴到质心的距离b为1.436m;质心高度hg为0.57m;车轮半径Rtire为0.287m。
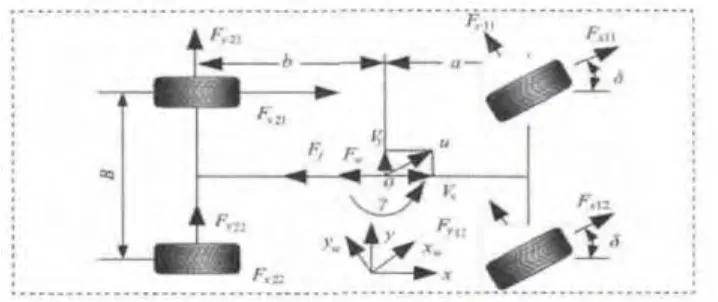
图4 四轮驱动整车模型
3.2 仿真结果及分析
(1)阶跃输入仿真
首先将车辆加速至80km/h后恒速行驶,在第5s输入0.9rad阶跃转向角,系统响应如图5、图6所示。

图5 横摆对比

图6 侧偏对比
由图可见,没有施加控制的车辆在仿真中4个电机的转矩不变,车辆的横摆角速度和侧偏角都很大,车辆操纵稳定性较差。施加控制以后,车辆产生与转向方向相反的稳定性横摆力矩,减小了车辆的横摆角速度和侧偏角,高速时的稳定性得到极大提高。
(2)稳态回转仿真
仿真时,先设定车辆的初始速度为0.1m/s,计算出转弯半径的大小,然后固定方向盘转角,缓慢连续均匀加速到6m/s,主要研究稳态回转时转弯半径比及前、后轴侧偏角绝对加速度之差与侧向加速度的变化关系,如图7和图8所示。

图7 车辆的转向半径对比
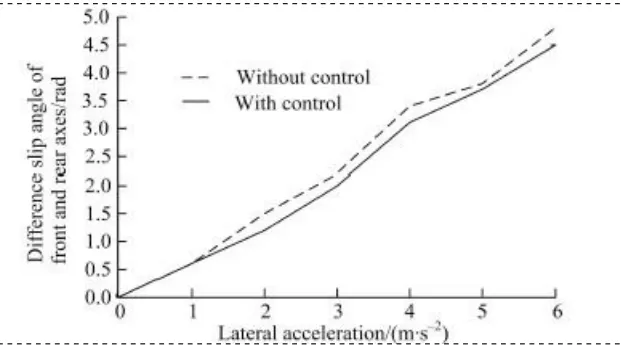
图8 车辆的前、后轴侧偏角之差
由图可见,在加速过程中由于控制产生了与转向方向相反的附加横摆力矩,使车辆的稳态操纵性得到提高,车辆的极限行驶性能潜力也得到极大提升。
(3)低附着路面仿真
车辆速度为80km/h,路面附着系数为0.2,在第3s时输入方向盘转角为0.1rad的阶跃信号,汽车横摆角速度响应如9所示。

图9 横摆对比
从中可以看出,与无控制的车辆相比,转矩协调控制明显改善了车辆在低附着路面上的行驶稳定性。但由于在低附着路面上汽车的驱动力与侧向力均不足,转矩协调控制也不能有效地控制车辆的运动,此时需要牵引力控制系统的协调工作。

图10 横摆对比
(4)正弦输入仿真
首先将车辆加速至80km/h后匀速行驶,在第5s时输入一个幅值为0.8rad、周期为1.5s的方向盘转角,响应曲线如图10和图11所示。

图11 侧偏角对比
与无控制的车辆相比,转矩协调控制大大降低了车辆的横摆角速度响应和侧偏角响应,使车辆达到稳态的时间缩短,车辆的操纵性大大改善。
4.结论
转矩协调控制可以提高车辆的加速潜力和极限行驶性能,提高车辆的稳定性和操纵性,为车辆的转向节能行驶提供理论依据。
[1]陈家瑞.汽车构造[M].北京:人民交通出版社,2005.
[2]郑荣良,朱爱萍.用于电动助力转向系统的控制逻辑电路[J].江苏大学学报(自然科学版),2004,25(3).
[3]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991.
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
中国外汇(2019年9期)2019-07-13
测控技术(2018年3期)2018-11-25
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
物理教学探讨(2018年1期)2018-02-13
自动化学报(2017年4期)2017-06-15
中国塑料(2015年3期)2015-11-27
