
无人机载微型SAR系统设计与实现∗
2014-03-14 01:03高许岗雍延梅
雷达科学与技术 2014年1期
高许岗,雍延梅
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
无人机是一种有效的遥感、监视、侦察和环境监测手段,在军民科研领域越来越受到重视。而合成孔径雷达(SAR)是具有全天时、全天候工作特点的高分辨成像雷达,已被广泛应用到军事和民用领域[1-3]。随着微电子技术、微波技术及计算机技术的快速发展,SAR得到了快速发展,但通常SAR雷达系统比较复杂,成本高,体积和重量也较大,无法安装于轻小型飞机和无人机、小卫星、小型弹等平台上,这限制了SAR的大规模应用。研制体积小、重量轻、功耗低的微型SAR是轻小型无人机等平台对SAR提出的新要求。当前,国内外文献[4-8]已公开了微型SAR的研究成果及试验结果。
本文首先给出微型SAR系统设计思路及系统的主要组成单元的设计方法;接着分析了线性调频连续波SAR成像算法及GMTI处理技术;最后给出了在无人机平台上外场飞行试验的条带成像和GMTI结果,结果表明了微型SAR系统的有效性和可靠性。
1 微型SAR系统设计
为了实现小体积、轻重量、低功耗的SAR系统,本系统采用调频连续波体制,连续波体制相比脉冲体制具有以下几个优点:(1)发射峰值功率低、截获概率低,同时也降低了设备的复杂度;(2)系统结构相对简单、成本低,减少了系统设备量;(3)易于采用去调频处理,降低了采样率,利于实现大宽带信号;但需要利用轻型微带双天线实现收发隔离,同时由于连续波体制,传统的SAR成像算法“停-走-停”近似处理方式不再适用,需要对已有成像算法和GMTI处理技术进行修正,下一节将给出连续波体制的SAR成像及GMTI处理的详细分析。伺服平台的结构设计、电路器件选型和电路设计上按照小尺寸、轻重量的原则,并将伺服与监控/信号处理一体化设计,降低了伺服平台的重量和体积。接收系统采用宽带线性调频信号产生、去调频方式、射频直接调制及解调技术、SoC芯片设计等,简化射频通道的电路结构、实现频率合成器一体化和高速波形与数据采集一体化设计,降低了收发设备体积、重量和功耗。图1给出了微型SAR系统的实物图。

图1 微型SAR系统实物图
综合实时成像处理采用DSP与FPGA混合处理技术、改进RD算法、二维频域补偿多普勒频移项的方法和方位脉冲特征提取并进行补偿方式,提高了信号处理性能,解决调频连续波的包络距离徙动和收发天线易干扰的问题,实现适用于轻型无人机平台的调频连续波体制的实时运动补偿与成像。
2 线性调频连续波SAR成像及GMTI处理
2.1 线性调频连续波SAR成像分析
由于脉冲体制SAR系统,脉冲持续时间远小于脉冲重复周期,而调频连续波SAR连续不间断地发射信号,接收信号时的运动和发射与接收信号之间的运动不能忽略[8],因此不能再采用通常的“停-走-停”近似,这样在回波信号描述飞机横坐标的变量中就会引入距离向“快”时间变量。距离向“快”时间变量在回波信号中表现为距离向与方位向的再次耦合以及距离向高次相位信息,这对回波信号的处理形成干扰,在成像算法中需要对其进行补偿。因而调频连续波SAR的成像算法要考虑到对采用“停-走-停”近似估计引入的多普勒误差进行补偿的处理。
对线性调频连续波SAR回波信号进行处理,采取Dechirp方式。假设发射信号为矩形包络的锯齿形线性调频信号,表示为

式中,μ为发射信号的调频斜率;fc为载频;PRI为发射信号重复周期。回波信号可以表示为
式中,T为进行Dechirp的时间,T<PRI;为回波Dechirp之后的残留相位误差(RVP),通常该项对成像影响比较小,可以忽略。考虑采用脉冲SAR中的处理方法,对调频连续波SAR的差频信号进行采样,并通过将回波差频信号变换到方位多普勒域,对回波信号的多普勒相位误差进行补偿,补偿后的成像处理可以采用近似“停-走-停”模型。后续的具体成像处理不再进行详细分析,完整的SAR成像算法流程如图2所示。
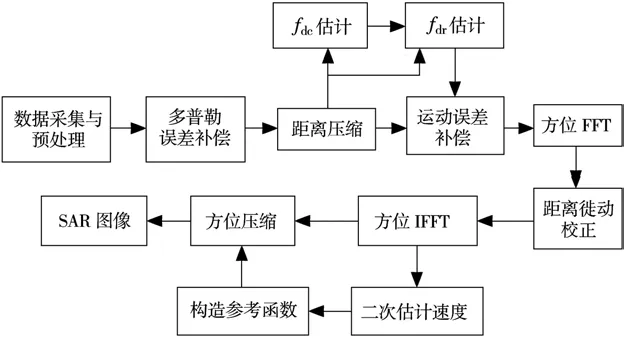
图2 调频连续波的改进RD成像算法流程
2.2 GMTI研究分析
对于动目标检测来说,通常采用双通道或多通道方法。采用多通道接收的方案使SAR系统硬件复杂,体积重量较大,无法满足微型SAR系统的要求;而传统的单通道SAR一般采用频域滤波法进行动目标检测,其要求很高的脉冲重复频率,而且对于速度模糊的情况一般很难检测且动目标检测性能变差。这里基于三角波调制的FMCW信号进行单通道动目标检测。
图3给出了GMTI处理流程。首先,对SAR接收的回波数据进行距离向分段,提取正、负调频数据。然后利用改进的RD成像算法分别对正、负调频的回波信号进行成像,得到复图像1,2。复图像1,2之间由于回波接收时间相差Tp/2(Tp为调制周期)的时间,导致两者在方位向位置上偏移v Tp/2的距离。该偏移是一个常量,易于消除。只需要将复图像2在方位向频域乘上线性相位因子exp(-jπfaTp)即可。然后将图像1,2相减,静止目标相互抵消,动目标得以保留。但在实际处理时,还存在沿距离向呈线性的相位变化。该变化量在参考距离处为零,远离参考距离处逐渐变大。由于该线性相位的存在,使得静止目标无法对消。实际处理时,由于图像中动目标较少,可以利用两幅图像分布式目标在全图范围内的相位差,沿距离向进行线性拟合,求得该线性因子。然后对其中一幅图像补偿该线性相位因子,就可以完全消除静止目标,保留运动目标信息。最后,对差图像进行简单的阈值处理就可以检测出图像中的动目标。
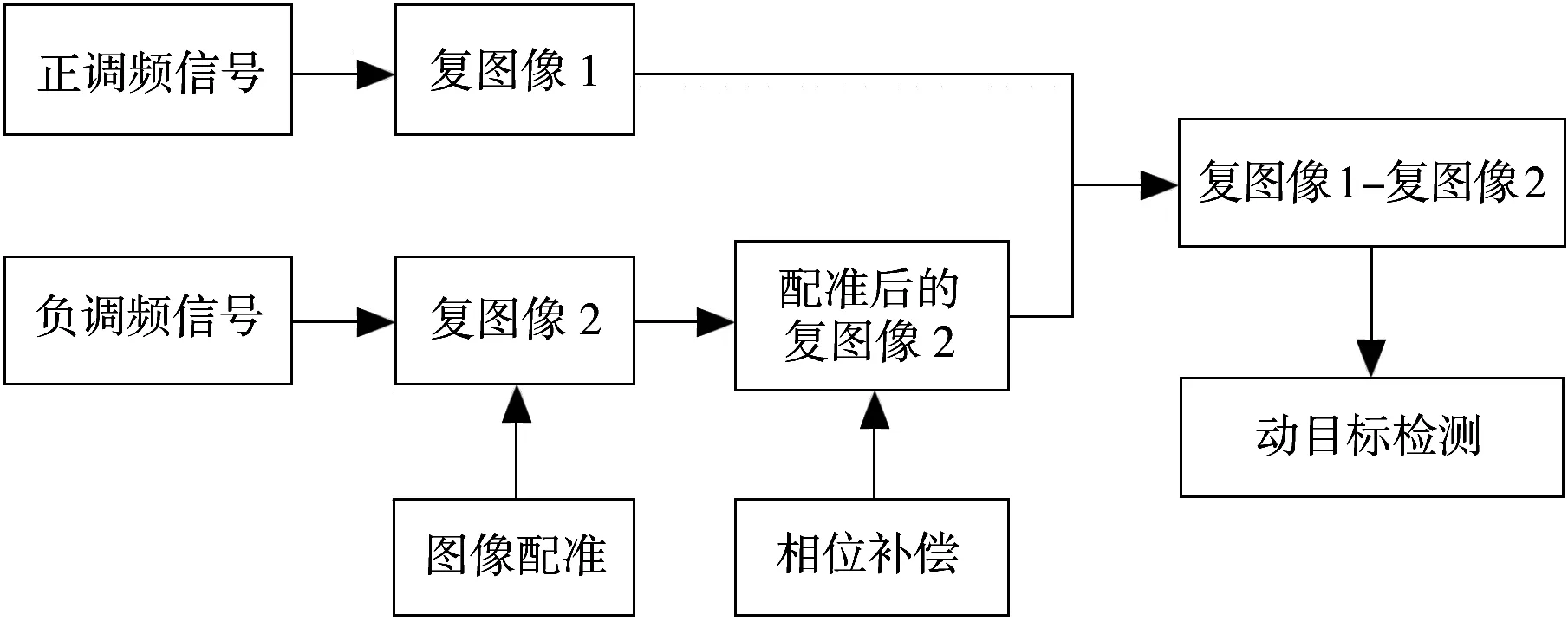
图3 GMTI处理流程图
3 无人机飞行试验结果
为了验证调频连续波体制的微型SAR系统性能以及在轻小型无人机平台飞行的可行性,在某近程轻小型无人机平台上进行了微型SAR挂飞试验。试验中,载机按预定直线航线飞行,飞行高度为2 000 m,飞行速度为180 km/h,进行了条带式成像和动目标检测功能试验验证。在载机上采用调频连续波SAR改进的RD算法实时成像,结果如图4所示,分辨率为0.5 m×0.5 m。图5给出了GMTI滤除主杂波后成像结果。由图可见,该系统能够在轻小型无人机上获取实时图像,并能实现动目标检测,说明系统有效可行。

图4 SAR实时成像结果
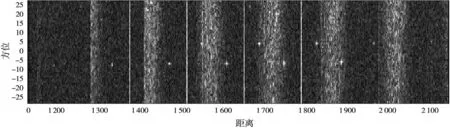
图5 GMTI滤除主杂波后成像结果
4 结束语
为了满足无人机载SAR的微型化要求,该系统通过采用连续波体制、射频直接调制及解调接收和收发系统部分芯片化设计,简化了发射通道结构及电路,且易于进行预失真补偿来提高信号品质,保障成像质量;通过采用伺服、监控和综合实时信号处理一体化设计打破传统模块化设计思路,减少了系统重量和体积。并针对连续波体制,给出了SAR成像算法及GMTI处理方式。目前,该系统已通过在轻小型无人机飞行试验验证,证明了系统在工程化方面的可靠和可行性。这对无人机载微型SAR成像技术研究和系统发展将具有重要推动作用。
[1]保铮,邢孟道.雷达成像技术[M].北京:电子工业出版社,2005.
[2]Cumming L G,Wong F H.合成孔径雷达成像——算法与实现[M].洪文,胡东军,译.北京:电子工业出版社,2007.
[3]李文臣,陆洪涛,宋胜利,等.SAR图像质量外场试验与评估技术[J].雷达科学与技术,2012,10(6):613-617.LI Wen-chen,LU Hong-tao,SONG Sheng-li,et al.Outfield Experimentation and Evaluation Techniques of SAR Image Quality[J].Radar Science and Technology,2012,10(6):613-617.(in Chinese)
[4]张玉玲,王鹏,曲长文.微型SAR发展状况[J].舰船电子对抗,2008,31(5):51-55.ZHANG Yu-ling,WANG Peng,QU Chang-wen.Development Situation of Miniature SAR[J].Shipboard Electronic Countermeasure,2008,31(5):51-55.(in Chinese)
[5]Steeghs P,Halsema E,Hoogeboom P.MiniSAR:A Miniature,Lightweight,Low Cost,Scalable SAR System[C]∥Proceedings of CEOS SAR Calibration/Validation Workshop,Tokyo,Japan:[s.n.],2011:125-128.
[6]Dale F,Dubber A,Sweer G.重量小于30磅的高分辨率miniSAR的试验结果[J].张培琴,译.空载雷达,2008(2):21-29.
[7]Duersch M I.BYU Micro-SAR:A Very Small,Low-Power LFM-CW Synthetic Aperture Radar[D].Brigham Young University,2004.
[8]Meta A.Signal Processing of FMCW Synthetic Aperture Radar Data[D].Holland Delft University of Technology,2006.
猜你喜欢
能源工程(2021年5期)2021-11-20
食品安全导刊(2021年20期)2021-08-30
唯实(2021年12期)2021-04-12
中学生数理化·高一版(2021年2期)2021-03-19
绿色中国(2019年13期)2019-11-26
科技传播(2019年24期)2019-06-15
人大建设(2019年12期)2019-05-21
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
卷宗(2018年14期)2018-06-29
消费导刊(2018年8期)2018-05-25
