馈能型悬挂综合性能评价研究
2014-03-11 14:01张进秋毕占东
装甲兵工程学院学报 2014年4期
张 磊,张进秋,岳 勇,毕占东,彭 虎,姚 军
(1.装甲兵工程学院装备试用与培训大队,北京100072;2.装甲兵工程学院教练团,北京100072)
车辆在颠簸路面上行驶时,由于车体和车轮间的相对运动,导致大量的振动能量通过阻尼器以热的形式耗散[1]。相关研究[2-4]表明:阻尼器的热耗散是不可忽视的,若能将这部分能量进行回收利用,对提高车辆燃油经济性、降低车辆能耗具有积极作用。对于军用车辆,其行驶路况恶劣,悬挂振动剧烈,因而具有更大的能量回收潜力[5]。
馈能型悬挂兼具振动控制和能量回收的双重功能,能够在改善车辆减振性能的同时降低悬挂系统能耗,是目前较具潜力的悬挂设计方案之一。美国德克萨斯大学在军用车改装项目中将电磁式馈能悬挂方案应用于在HMMWV上,在大幅改善悬挂性能的同时,实现了能量的回收、储存和管理[6-7]。Bose公司在Lexus轿车上采用了基于直线电机的馈能型悬挂结构,实车试验中表现出良好的减振性能,且平均每个作动器可回收25 W的能量[8]。上海交通大学的张勇超等[9]基于帕萨特车型验证了馈能型悬挂系统回收车辆振动能量的可行性。
目前,国内外关于馈能悬挂的研究虽然取得了一定成果,但仍然存在一些问题有待解决,其中之一就是缺少适用的综合性能评价方法和指标。为此,本文在分析悬挂减振性能评价和能耗的基础上,提出了一种适用于车辆馈能型悬挂的综合性能评价指标和方法。
1 悬挂系统动力学模型
以独立悬挂为研究对象,忽略其非线性且假设车辆质量分配系数为1,仅考虑车辆垂直运动方向的振动,可建立如图1所示的双质量二自由度可控悬挂系统动力学模型。假设坐标原点选取在各自平衡位置,则该悬挂动力学方程可表示为
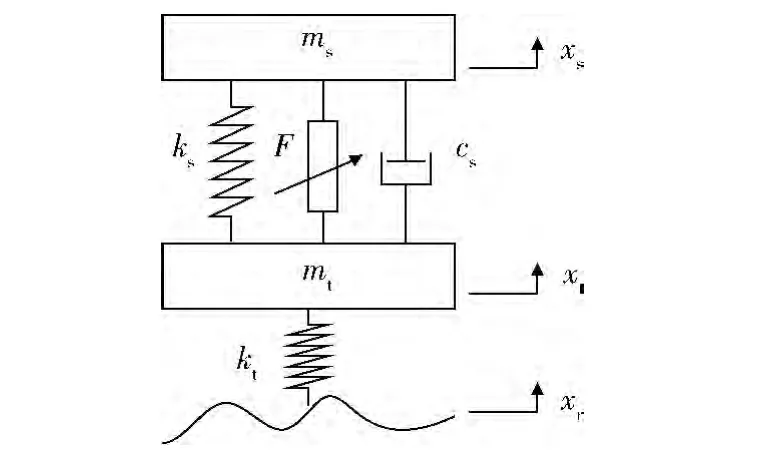
图1 可控悬挂系统动力学模型

式中:ms、mt分别为悬置质量和非悬置质量;ks、kt分别为悬挂弹簧和车轮刚度;cs为悬挂阻尼系数;xs、xt和xr分别为车体、车轮垂直位移和路面不平度激励;F为控制力。
2 悬挂减振性能评价
悬挂减振性能主要考虑悬挂性能对车辆乘坐舒适性和操纵稳定性的影响,评价指标包括车身加速度、车轮动变形和悬挂动挠度。其中,车身加速度和车轮动变形分别用于评价乘坐舒适性和操纵稳定性,且都是越小越好。由于悬挂应充分利用许用工作空间实现减振,因此悬挂动挠度并非越小越好,只需将其控制在许用范围以防止发生“悬挂击穿”即可。悬挂减振性能评价通常以悬挂动挠度为约束,采用车身加速度和车轮动变形进行定量评价。
车辆乘坐舒适性通常采用加权车身加速度均方根值进行评价,而路面状况和车速对该指标计算结果影响较大;操纵稳定性评价以车轮动变形均方根值为指标,忽略了路面输入的频率差别。笔者课题组[10]针对上述不足,定义了舒适性和操纵稳定性评价函数,排除了路面和车速对悬挂减振性能的影响,考虑了路面输入对操纵稳定性影响的频域差别。
乘坐舒适性评价函数定义为

当路面激励频率较低时,车轮动变形低谷时间持续较长,对操纵稳定性和安全性影响较大;反之,则影响较小。考虑车轮动变形的这种频率差别,定义操纵稳定性评价函数

对于线性悬挂,响应对路面输入的传递率可通过Laplace变换求解;对于非线性悬挂,各响应量传递率也可近似估计[11]。因此,该减振性能评价方法适用于线性和非线性悬挂。分析式(2)-(4),Ja、Jd取值均在[0,1]区间,且其值越小,表示响应指标性能越好。对于标准被动悬挂,Ja=Jd=1。
3 馈能型悬挂能耗分析
不计悬挂系统振动控制和能量回收时的功率损失,馈能型悬挂能量流分析如图2所示。馈能型悬挂工作时所需的能量来源于发动机,其中阻尼器始终做负功,消耗车辆振动能量并以热的形式耗散。作动器能量流动方向取决于其工作状态,当做功为正时,为耗能元件;当做功为负时,为馈能元件,理论上可实现对车辆振动能量进行回收。回收的能量通过能量回收装置进行储存,可继续为悬挂系统或其他车载设备再利用。由能量转换过程的功率平衡,馈能型悬挂系统消耗的总功率为

图2 馈能型悬挂能量流分析

式中:Pdamper为阻尼器消耗的功率;Pem为作动器消耗或回收能量的功率。
馈能型悬挂中,阻尼器平均热耗散功率在时域上可表示为

悬挂相对速度的均值为0,其均方值为功率谱密度函数在整个频率范围内的积分,因此阻尼器平均热耗散功率在频域上可以表示为
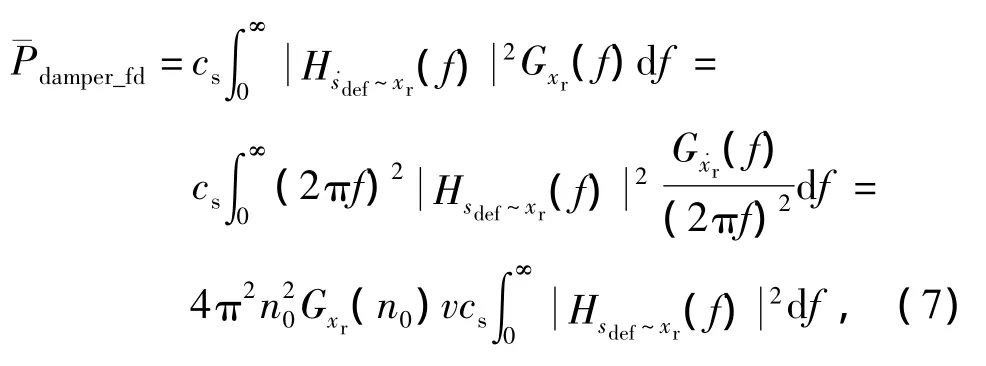
式中:H˙sdef~xr(f)、Hsdef~xr(f)分别为悬挂相对速度、动挠度传递函数;G˙xr(f)、Gxr(f)分别为车体速度、车体位移功率谱密度函数;n0=0.1 m-1,为空间参考频率;Gxr(n0)为路面不平度系数;v为行驶车速。
式(7)中阻尼器平均热耗散功率的影响因素:一是悬挂的结构参数,取决于悬挂参数和控制策略;二是车辆行驶工况,取决于路面不平度和行驶车速。
不计电磁作动器工作的内部能量耗损和机械耗损,从时域的角度分析作动器平均能耗功率为
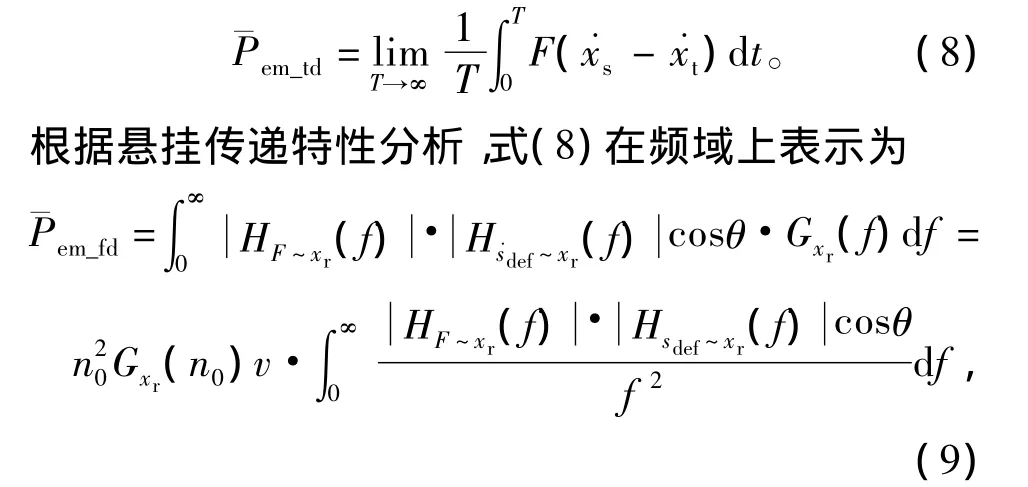
式中:HF~xr(f)为控制力的传递函数;θ为HF~xr(f)和H˙sdef~xr(f)的相位差。由式(9)可知:作动器平均能耗功率也取决于悬挂的结构参数和运行工况。
4 馈能悬挂综合性能评价
4.1 综合评价指标
传统悬挂性能评价主要分析悬挂性能对乘坐舒适性和操纵稳定性的减振性能的影响。然而能耗是制约悬挂技术发展的又一关键问题。对于馈能型悬挂,能够在实现对车辆有效减振的同时回收振动能量,降低悬挂工作能耗。因此,对馈能悬挂综合性能进行评价,必须对减振效果和能耗特性2方面因素进行综合考虑。为分析悬挂参数对能耗的影响,定义无量纲指标悬挂能耗比:
式中:¯Pnom为标准被动悬挂的平均能耗功率。当ε>0时,说明悬挂消耗发动机功率;当ε<0时,说明馈能悬挂可回收能量。而且ε越大,说明悬挂的能耗越大;反之,则说明悬挂的节能性能越好。
对于线性悬挂,路面输入对各响应量的传递函数是可解的,能耗比可通过频域的形式来计算:


式中:¯Pnom_fd为标准被动悬挂平均能耗功率的频域表示,可代入其悬挂参数并参照式(7)计算。
对于非线性悬挂,路面输入对各响应量的传递函数无法求解,因此将能耗系数表示为时域形式:

式中:¯Pnom_td为标准被动悬挂平均能耗功率的时域表示,计算方法参考式(6)。
基于上述分析建立悬挂综合性能评价函数:

式中:λa、λd分别为乘坐舒适性和操纵稳定性权重系数,反映对2个指标的重视程度;b、a分别为ε的上、下界值,其作用是对能耗指标进行归一化处理。
悬挂综合性能指标J综合考虑了悬挂性能对车辆乘坐舒适性、操纵稳定性和能耗的影响,其取值越大,说明悬挂综合性能越佳,反之越差。
4.2 实例分析
以某型车辆悬挂系统为研究对象,分别验证提出的性能评价指标和方法对线性悬挂和非线性悬挂综合性能评价的有效性。线性悬挂综合性能评价以天棚控制和加速度阻尼控制下的主动悬挂为研究对象;非线性悬挂评价对象为天棚、加速度阻尼控制下的半主动悬挂。其中,标准被动悬挂参数取值如表1所示。悬挂综合性能评价时,式(13)中a=-2,b=2,当 ε < -2时,令 ε =-2;当 ε >2时,令 ε =2。

表1 标准被动悬挂参数
4.2.1 线性悬挂评价
天棚(Sky-Hook,SH)控制通过在车身和车轮间施加一个与车身速度相反的天棚阻尼力来实现:

式中:csky为天棚阻尼系数。
加速度阻尼(Acceleration Driven Damping,ADD)控制通过在车身和车轮间施加一个与车身加速度方向相反且大小成比例的控制力来实现:

式中:α为比例系数,取值范围为[0,1]。
在对悬挂系统进行上述2种控制时,悬挂参数ms、mt、ks及 kt取值与表 1 相同,取 cs=cs_nom,分析csky和α对悬挂综合性能的影响。
对于 SH 控制,当 csky∈[0,10]kN·s/m 时,悬挂乘坐舒适性、操纵稳定性和能耗比各指标如图3所示。可见:随着csky的增大,悬挂的乘坐舒适性和操纵稳定性都得到了改善,且操纵稳定性的改善尤为明显;悬挂能耗比ε随csky的变化呈类抛物线状,先减小后增大,且当 csky∈[2,6]kN·s/m 时,ε <0,说明此时SH控制下悬挂理论上可回收能量。
为反映λa、λd对悬挂性能综合评价结果的影响,其取值如表2所示。2组取值分别侧重于改善车辆的乘坐舒适性和控制悬挂系统能耗,评价结果如图4所示。可以看出:当λa较大时,随着csky的增大,悬挂综合性能首先显著提升,而后缓慢下降,在csky=6.5 kN·s/m 时,取得极大值 J=0.309 5;当侧重于控制能耗时,随着csky的增大,悬挂综合性能先显著提升,而后迅速下降,在csky=4.15 kN·s/m时,取得极大值 J=0.409 7。对比图 3、4,由于 csky∈[2,6]kN·s/m 时能耗比较小,所以图4(b)极大值点较图4(a)横坐标向零点方向移动。
对于ADD控制,当 α 在[0,1]区间取值时,Ja、Jd和ε随α的变化曲线如图5所示。可以看出:随着α的增大,Ja和Jd呈近乎直线趋势改善,且Ja改善程度较为显著;ε呈近乎线性增大,且取值均大于1,说明ADD控制能耗大于标准被动悬挂。
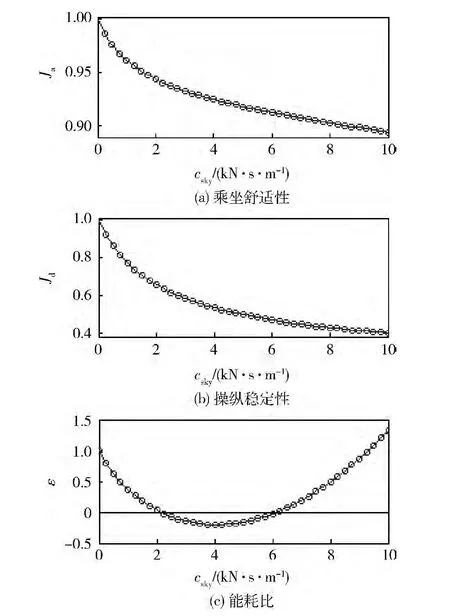
图3 悬挂指标随c sky的变化曲线

表2 权重系数取值
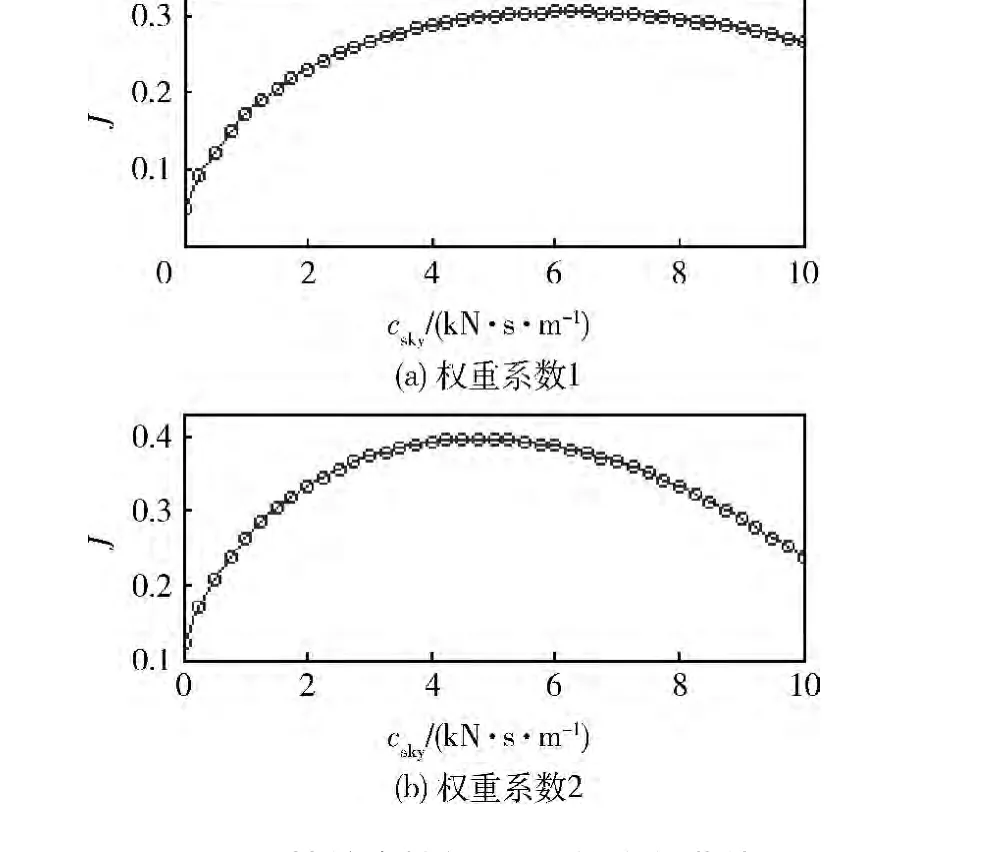
图4 悬挂综合性能随c sky的变化曲线
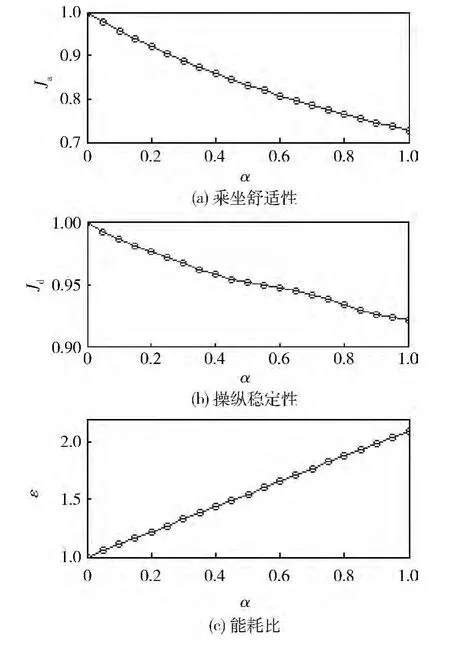
图5 悬挂指标随α的变化曲线
分别取表2中2组权重系数对ADD算法控制下的悬挂性能进行综合评价,其结果如图6所示。可见:当权重系数取值侧重于乘坐舒适性时,悬挂综合性能随α的增大呈类线性趋势增大;当权重系数取值侧重于能耗时,悬挂综合性能在[0,0.9]范围内随α增大先缓慢增大后迅速减小,在α=0.9时取得极小值,随后呈线性缓慢增大,当α=0.1时,取得极大值J=0.126 8,代表此时悬挂综合性能最佳。对比图4、6,与SH控制相比,ADD控制在参数变化范围内虽然对乘坐舒适性的改善优于SH控制,但对操纵稳定性的控制明显不及SH控制,且能耗较大,所以其综合性能劣于SH控制。
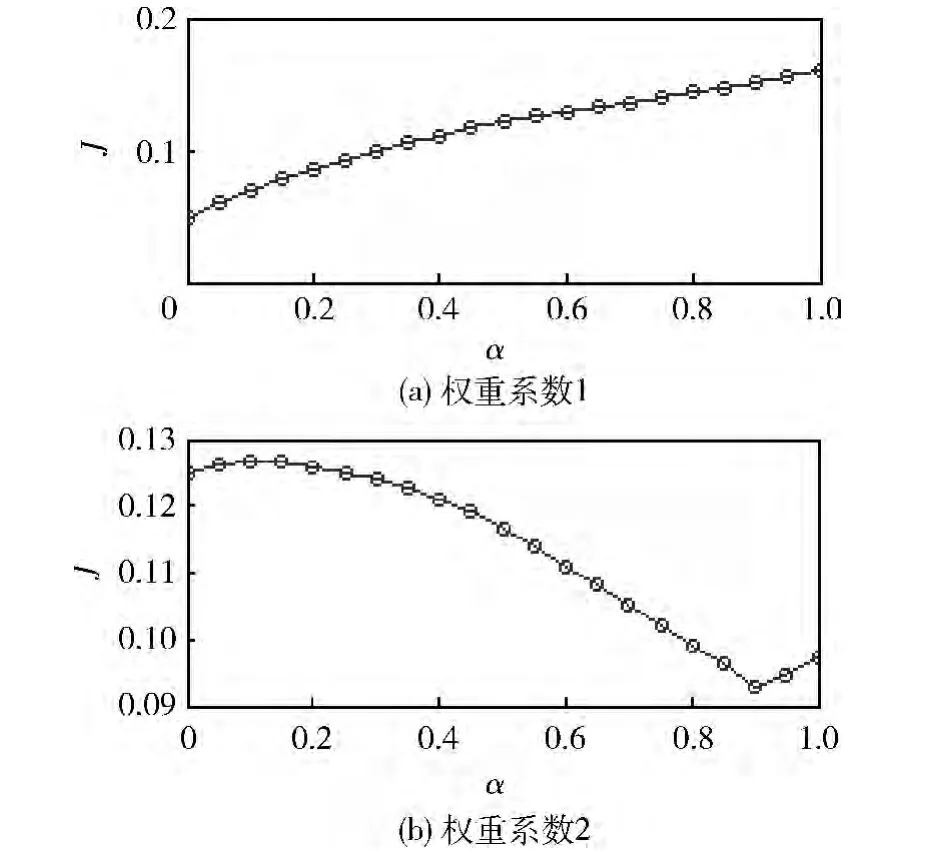
图6 悬挂综合性能随α的变化曲线
4.2.2 非线性悬挂评价
依据式(14)、(15),可基于“on-off”变阻尼控制规则实现SH和ADD两种算法的半主动控制,其控制律分别为
式中:cmax和cmin分别为半主动悬挂的最大和最小阻尼,分别取 cmax=2.5 kN·s/m,cmin=0.5 kN·s/m 进行计算。
对于半主动悬挂,由于控制算法的非线性导致悬挂各指标响应对路面激励的传递函数无法通过数学方法表示,因此对于能耗比ε的估计应基于式(12)。以Matlab/Simulink为仿真平台搭建相应半主动悬挂控制系统,基于谐波叠加法分别生成B、C、D、E级路面的不平度激励,分析路面等级和行驶速度对悬挂能耗比ε的影响。取计算时间T=300 s,图7(a)为2种半主动悬挂以20 m/s的速度在B、C、D、E级路面行驶的能耗比,图7(b)为2种半主动悬挂在D级路面分别以5、10、15、20 m/s速度行驶时的能耗比。通过对比发现:当计算时间足够长时,可基本排除路面随机特性对悬挂能耗比的影响,不同路面、不同速度下2种半主动悬挂的能耗比基本为常数。因此,为不失一般性,选取D级路面以车速20 m/s行驶时的能耗比进行非线性悬挂综合性能评价。2种半主动悬挂的能耗比均为负值,说明在进行2种半主动控制时悬挂可回收能量,且SH控制下悬挂回收能量的功率明显高于ADD控制。

图7 车辆运行工况对能耗比的影响
图8为基于式(2)、(4)的车辆减振性能评价结果。与标准被动悬挂相比,SH半主动控制下车辆的乘坐舒适性和操纵稳定性均得到了不同程度的改善;ADD控制对乘坐舒适性的改善优于SH控制,但却以恶化操纵稳定性为代价。

图8 车辆减振性能评价结果
取表2中的2组权重系数对2种半主动悬挂进行综合性能评价,结果如图9所示。可见:无论权重系数选取侧重于车辆乘坐舒适性还是悬挂能耗,SH半主动悬挂综合性能均优于ADD半主动悬挂,这是由于ADD控制下悬挂操纵稳定性较差且能耗较大。

图9 半主动悬挂综合性能评价结果
5 结论
通过车辆悬挂系统减振性能评价和能耗分析,提出了反映车辆乘坐舒适性、操纵稳定性和悬挂系统能耗的悬挂综合性能评价方法,并通过实例分析验证了该评价方法对线性悬挂和非线性悬挂综合性能评价的有效性,分析了控制参数取值和指标权重系数对悬挂性能综合评价结果的影响。该悬挂性能综合评价方法适用于线性和非线性馈能型悬挂,可为悬挂系统参数优化、控制算法设计提供依据,也可为其他形式的车辆悬挂综合性能评价提供参考。
[1] 于长淼,王伟华,王庆年.混合动力车辆馈能式悬架的节能潜力[J].吉林大学学报:工学版,2009,39(4):841-845.
[2] Kawamoto Y,Suda Y,Inoue H,et al.Modeling of Electromagnetic Damper for Automobile Suspension[J].Journal of System Design and Dynamics,2007,1(3):524-535.
[3] Nakano K,Suda Y,Yamaguchi M,et al.Application of Combined Type Selfpowered Active Suspensions to Rubber-tired Vehicles[J].JSAE Annual Congress,2003,6:19-22.
[4] 喻凡,曹民,郑雪春.能量回馈式车辆主动悬架的可行性研究[J].振动与冲击,2005,24(4):27-30.
[5] 张进秋,彭志召,岳杰,等.车辆馈能悬挂技术综述[J].装甲兵工程学院学报,2012,36(5):1-7.
[6] Efatpenah K,Beno JH,Nichols SP.Energy Requirements of a Passive and an Electromechanical Active Suspension System[J].Vehicle System Dynamics,2000,34(6):437-458.
[7] 喻凡,张勇超.馈能型车辆主动悬架技术[J].农业机械学报,2010:41(1):1-6.
[8] Jones W.Easy Ride:Bose Corp Uses Speaker Technology to Give Cars Adaptive Suspension[J].IEEE Spectrum,2005,42(5):12-14.
[9] 张勇超,喻凡,顾永辉,等.汽车电动悬架的减振与馈能特性试验验证[J].上海交通大学学报,2008,42(6):874-877.
[10] 彭志召,张进秋,张雨,等.车辆半主动悬挂的频域控制算法[J].装甲兵工程学院学报,2013,27(4):36-42.
[11] Savaresi SM,Spelta C.Mixed Sky-Hook and ADD:Approaching the Filtering Limits of a Semi-active Suspension[J].Journal of Dynamic Systems,Measurement and Control,2007,129(4):382-392.
猜你喜欢
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
舰船科学技术(2021年12期)2021-03-29
广西科技大学学报(2021年1期)2021-03-15
福建基础教育研究(2019年12期)2019-05-28
消费导刊(2018年10期)2018-08-20
科学与财富(2017年12期)2017-05-16
汽车技术(2017年4期)2017-04-26
汽车工程学报(2015年6期)2016-03-23
消费者报道(2016年3期)2016-02-28