育苗盘机械手定位精度试验方法研究
2014-03-06 02:00王永志
吉林工商学院学报 2014年2期
徐 文,王永志
(吉林工商学院 生物工程学院,吉林 长春 130507)
育苗盘机械手定位精度试验方法研究
徐 文,王永志
(吉林工商学院 生物工程学院,吉林 长春 130507)
单纯依靠提高气缸行程的精度的方法,很难满足育苗盘机械手与穴盘的对中精度要求,为了保证机械手在拔取育苗时进行可靠的工作,设计了一种附加在气缸的输出杆上的精密距离微调装置,通过调节这种微调装置,可以方便地达到机械手在气爪与穴盘对精度的要求。本文根据移栽要求,采用了一种双向循环式育苗盘机械手定位精度试验方法,对这种附加距离微调装置的育苗盘机械手的定位精度和重复定位精度进行检测,结果显示,机械手的重复定位精度和定位精度误差很小,可满足移栽工作要求。
育苗盘机械手;定位精度;试验方法
现代化蔬菜花卉的育苗体系以穴盘育苗为代表,移栽是生产过程中的重要环节。育苗盘机械手作为工厂化种苗生产工艺中自动移栽秧苗的一种重要器具,可以有效提高移栽的生产效率。自行研制的附加在育苗盘机械手气缸输出杆上的精密距离微调装置,具有结构简单、调节方便等特点,可以满足育苗盘机械手与穴盘的对中精度要求。为了检验该装置的栽植均匀度,本文设计了一种双向循环式检测方法,直接对育苗盘机械手的重复定位精度和定位精度进行测量,得到了更精确的测量结果。实验证明,该装置可以有效提高机械手与穴盘的对中精度,能准确地按照作业要求的运动进行移栽动作,可以提高移栽工作效率。
一、试验方案设计
1.测量基本要求
机械手的精度包括了定位精度和重复定位精度。实际位置与理想位置之间的误差称为定位误差。它影响机械臂运行的位置精度。要测量育苗盘机械手的定位精度和重复定位精度,运动构件应沿着或围绕轴线运动到一系列目标位置,同时能够在各目标位置停留足够长的时间以便观测者测量和记录机械手实际位置。机械手应按程序以同一进给速度在目标位置间移动。
2.运动构件的定位和重复定位
如图1所示,为保证测量结果的精确性,采用双向评定方式即运动构件以正反两个方向依次趋近5个目标位置。将运动构件完成一次往复作为一个循环,共进行5次循环测量,循环方式采用线性循环测量方式。

图1 定位误差和重复定位误差循环测量示意图
3.机械手运行方式
机械手的运行方式有分步运行和两轴联动两种,分别测量在这两种运行方式下的定位精度和重复定位精度。机械手进给系统两轴的工作行程分别为LX=550mm和LY=480mm,X轴和Y轴检测目标位置数分别为5个,检测方向为双向趋进。
二、实验步骤
1.实验器具和测量条件
实验中需要配备的工具要可靠安全,实验的育苗盘机械手需要状态良好,实验的整个过程中不可以随便更换设备和操作人员。根据测量实验标准,使测量机械手和检测仪器、工具在检测环境中处于等温状态。此外,在检测时要避免外部环境的温度、气流、日晒等方面的直接影响。
2.实验测试
编制育苗盘机械手控制程序,使机械手运动构件按照程序双向依次趋近目标。同时,机械手在每个目标位置停留30—60秒,等待测量仪采集和记录数据。实验采用线性循环测量,测5次。应使机械手运动构件按照程序双向趋进目标,并在每个测量位置上停留几秒钟,以便准确记录实际位置。
3.测量与数据记录
定位精度测量与重复定位精度测量可用同一个循环图(如图1所示),采用游标卡尺在纸带上画点的方法进行测量。分别从正向和反向两个方向趋进目标。
三、数据计算和实验结果分析
按照上述实验步骤,得到如表1—4所示的实验数据。
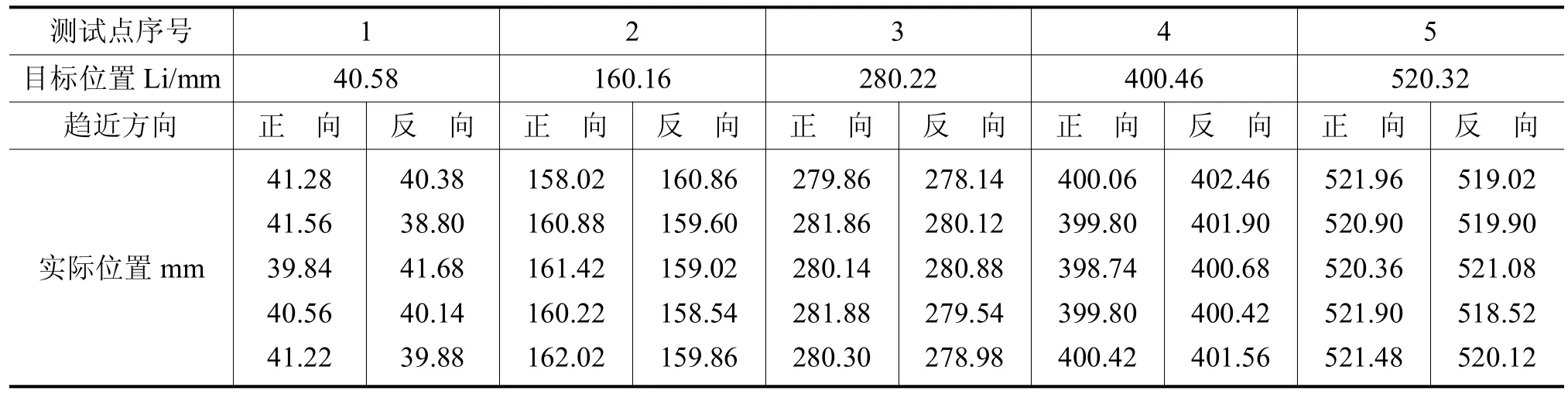
表1 分步运动时X轴数据记录表

表2 分步运动时Y轴数据记录表
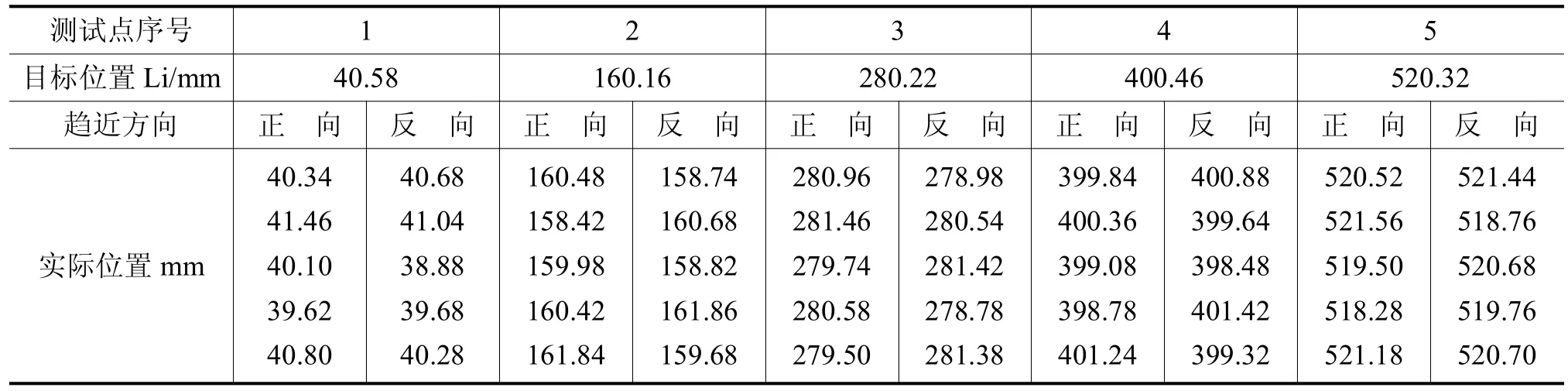
表3 两轴联动时X轴数据记录表
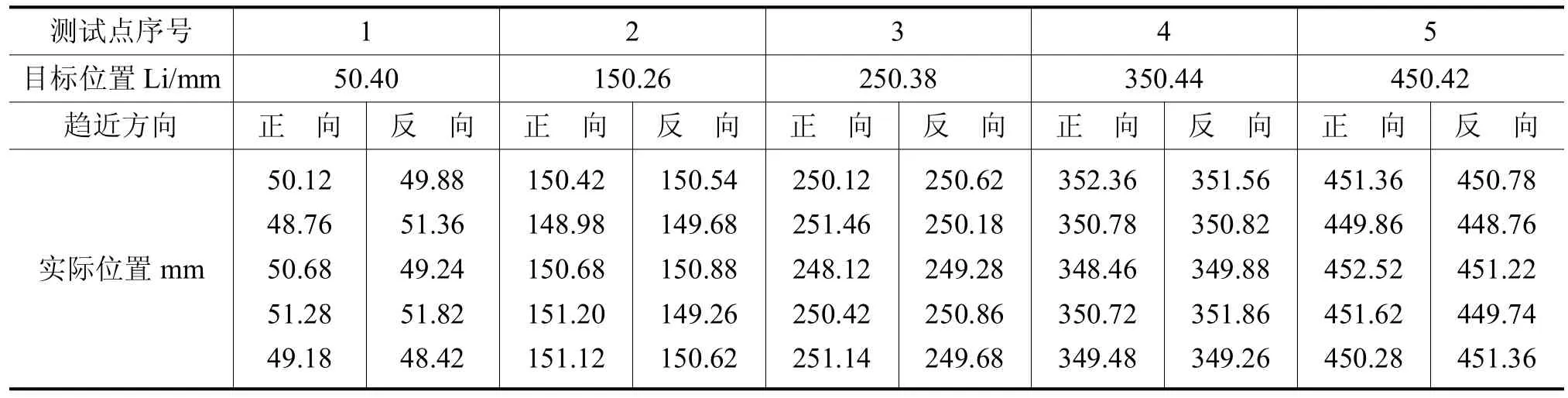
表4 联动时Y轴数据记录表

式中,Li(i=1,2…m)为育苗盘机械手目标位置,即运动构件停留的理想位置。下标i表示沿轴线或绕轴线选择的各目标位置。
Lij(i=1,2…n,j=1,2…m)为育苗盘机械手正向趋近目标点时的实际位置,即运动构件每次向目标位置正向趋近时实际测得实际位置。下标i表示各目标位置,下标j表示循环的次数。
Lij′(i=1,2…n,j=1,2…m)为育苗盘机械手反向趋近目标点时的实际位置。


育苗盘机械手在各目标点重复定位标准差可由公式4求得:

将实验数据代入以上公式,得出如表5所示育苗盘机械手的定位精度和重复定位精度。

表5 育苗盘机械手定位精度和重复定位精度
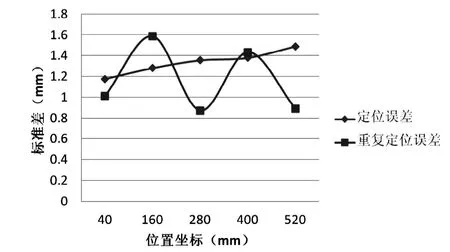
图2 分步运动时X轴方向上定位精度与重复定位精度

图3 分步运动时Y轴方向上定位精度与重复定位精度

图4 两轴联动时X轴方向定位精度与重复定位精度

图5 两轴联动时Y轴方向定位精度与重复定位精度
机械手分步运动时X轴方向定位精度和重复定位精度数据如图2所示,Y方向定位精度和重复定位精度数据如图3所示。机械手两轴联动时X轴方向定位精度和重复定位精度数据如图4所示,Y方向定位精度和重复定位精度数据如图5所示。
四、结论
1.从图2、3、4、5可以看出机械手具有很高的重复定位精度和定位精度。因此,机械手可满足移栽精度的要求。
2.机械手运行时,我们可以发现理论轨迹和实际轨迹相差很小。因此,机械手的运行精度能够进行移栽工作。
3.在试验中采用了游标卡尺作为测量工具,定位点是在纸带上量出目标距离后,手工标记出来。测量受人为因素影响较大。如果采用激光干涉仪测量可得到更精准的数据、并可尝试采用自动化测量方法。
[1]顾瑞龙.控制理论及电液控制系统[M].北京:机械工业出版社,1984.
[2]张友德.单片微型机原理、应用与实验[M].上海:复旦大学出版社,2005.
[2]成跃.农业机器人的应用与发展[M].农业科技推广,2005,(7).
[4]孙军.国外农业工厂化生产现状[J].农村新技术,2001,(2).
[5]李其昀.机械化育苗移栽的现状与展望[J].农机化研究,2006,(3):26-27.
[6]程前,石秀峰.国内现行移栽机械取苗分苗机构的应用与发展[J].新疆农机化,2013,(3):15-16+18.
[8]张丽华,邱立春,田素博.穴盘苗自动移栽机的研究进展[J].农业科技与装备,2009,(5):28-31.
[9]刘炜,刘继展.穴盘苗移栽机器人末端执行器综述[J].农机化研究,2013,(7):6-10.
[责任编辑:樊保臣]
TH16
A
1674-3288(2014)02-0091-04
2013-12-12
徐文(1967-),男,吉林长春人,博士,吉林工商学院生物工程学院教授,研究方向:机械设计制造及自动化。
猜你喜欢
军事文摘(2023年4期)2023-04-05
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
国际木业(2016年8期)2017-01-15
国际木业(2016年12期)2016-12-21
国际木业(2016年3期)2016-12-01
国际木业(2016年1期)2016-12-01