利用VLBI技术进行深空航天器跟踪的仿真分析
2014-03-06 08:28:19孙靖王美平劲松
深空探测学报 2014年3期
孙靖,王美,平劲松,2
(1.航天飞行动力学技术国防科技重点实验室,北京100094;2.中国科学院国家天文台月球与深空探测重点实验室,北京100012)
利用VLBI技术进行深空航天器跟踪的仿真分析
孙靖1,王美1,平劲松1,2
(1.航天飞行动力学技术国防科技重点实验室,北京100094;2.中国科学院国家天文台月球与深空探测重点实验室,北京100012)
差分VLBI(D-VLBI)技术常用于测量航天器相对于参考射电源的角位置,用其跟踪深空航天器可取得足够高的精度。针对深空探测任务中D-VLBI技术的特性,提供了观测时间间隔的设置参考,通过仿真分析,研究了航天器和参考射电源之间的角距离、传播路径上的介质差异等因素及其对观测精度的影响,为后续深空航天器飞行任务的设计提供技术支持。
VLBI;差分VLBI;深空探测
0 引 言
差分VLBI(D-VLBI)交替观测深空航天器和其附近的参考射电源,其目标是消除未建模的误差来源,取得高精度的航天器相对于参考射电源的角度位置。这些误差源包括测站的时钟偏差和设备延迟、由于不准确的测站坐标或者未建模的测站站址变化导致的基线误差以及未校正的传播介质误差。对于差分时延观测量,误差的消除程度取决于信号传播路径的相似性、观测的时间间隔、信号频谱特性的相互匹配性[1]。其中信号频谱特性的相互匹配性尤为重要,因为在通常的航天器-参考射电源观测方法中,参考射电源发射的是覆盖几千兆赫兹的宽带信号,而航天器信号进行了频带限制,一般只包含几个用于VLBI跟踪的窄带频率信号。
D-VLBI通常采用的观测模式是,在对一个信号源的观测时间前后进行其它参考信号源的观测,可以使用参考射电源-航天器-参考射电源序列或者航天器-参考射电源-航天器序列的模式完成观测。原则上讲,观测切换间隔越短或者航天器与参考射电源的角距离越小,则信号传输路径之间的相似性越高,可以取得越好的观测结果。在实际深空任务中,通常观测切换间隔设置为几分钟,航天器与参考射电源的角距离最大到25°[2]。

图1 D-VLBI观测原理示意图(航天器的方向是相对于参考射电源来确定)Fig.1 Illustration of D-VLBI principle(the direction to a space probe is determined relative to that of a reference source)
1 观测时间间隔的设置参考
在D-VLBI观测中,对一个信号源的观测时间意味着对其它信号源的观测间隔。对群时延的观测中,为了获得信噪比足够高的精确测量,积分时间通常为几分钟。在几分钟的观测时间内,信号传播路径上的介质变化(如短周期介质波动)不能被消除掉。当提取时延观测量时,这将会影响最终观测精度。由于深空任务中我们通常要观测较弱的射电源,所以深空网常采用大天线(如34 m天线)来进行观测。
对于相时延观测,观测时间间隔更为重要,这是测量本身能否成功的重要指标。针对天体相位参考方法[3]和窄带ΔVLBI相位观测[4],以观测时间间隔内相位变化呈线性或者多项式性建模,开发了计算机辅助方案用来连接连续观测得到的条纹相位,观测得到的条纹率也可以被用来解算模糊度。Wrobel等[5]认为大气的动态变化是决定观测时间间隔的主要约束,并提出对于典型大气条件下8.4 GHz频率的相位观测可以设置300 s的观测切换时间。另外一种更先进的方法是由Kondo等提出[6],即根据真实的气候条件,动态地控制观测时间间隔。在日本SELENE任务的VLBI观测中,积分时间设置为50 s,加上10 s的天线旋转时间,则观测时间间隔为60 s[7]。
2 航天器-参考射电源的角距离
在D-VLBI观测中,随着航天器和参考射电源之间角距离的缩小,大部分误差都将被消除。最理想的情况是,可以在距离航天器几度角距离的范围内找到较强的参考射电源,但这种理想的观测条件目前还远远达不到。根据Lanyi等的研究结果[8],在X波段的观测中,对于黄道附近的航天器(也是大部分深空任务航天器的运行轨道),平均距离航天器约6°的角距离范围内,分布有足够多的较强的参考射电源。然而在实际的深空任务中,通常是在任务开始之前,先对深空中的相应区域进行彻底的射电源搜索,尤其是当射电源被要求限制在距离航天器非常近的角距离情况下。随着未来深空航天器的跟踪频率从S/X波段逐渐过渡到更短的波长,也需要有相应的射电源来满足可用性和精度要求。
在深空飞行任务中,测站天线之间的基线长度相对于航天器到测站天线的距离是非常小的。因此若在其中一个测站看到参考射电源接近目标源,即夹角较小时,则在其它测站的情况也是如此。如果测站天线距离航天器较近时,情况则不同。根据简化的二维几何构形,仿真中两个测站天线构成的基线长度为b,考虑高度h分别在10 000、20 000、30 000、50 000、100 000和400 000 km的航天器,ε定义为基线和航天器之间的角度,假设航天器在测站1的仰角ε1在1~90°之间变化,则航天器在2个测站的仰角差Δε=ε2-ε1如图2所示,其中不同颜色表示不同的基线长度,即从下往上的曲线分别表示100 km到两倍的地球半径。对于距离地球400 000 km(约地月距离)之外的航天器,最大的仰角差为2°,这认为是可以忽略的。对于高度在50 000 km的航天器,仰角差在5~10°的范围。对于高度约20 000 km的GNSS卫星以及更低轨道的航天器,仰角差约为10°,所以用于深空航天器跟踪的传统D-VLBI技术不能直接用于近地卫星跟踪。
3 传播路径上的介质差异
传播路径上误差的消除要求两个信号经过的介质有很强的相似性。Kikuchi等(2009)[7]研究了最大到1°的仰角差的影响。以下将评估分析更大仰角差情况时传播介质误差的消除。
当仰角差很小时,在分析中完全可以只进行对流层干延迟的建模而忽略湿延迟作用的影响,但这不适用于大的仰角差观测情况。下面计算中,考虑最简单的映射函数

并假设天顶湿延迟为150 mm,仰角为el1,仰角差Δel=el2-el1,则两条传播路径上的湿延迟残差如图3所示,其中不同颜色表示的曲线从下往上对应为Δel分别为0.1°、5°、10°、20°和40°。对于仰角差为5°(中间黄色区域),仰角为30°时,传播路径上的介质差异约为假定的天顶湿延迟的1/2,即在该仿真中为75 mm。显而易见的是在仰角越低时传播路径上介质的差异效果越明显。从图中可以注意到的是,如果Δel大于1°,湿对流层不能被很好的消除掉。
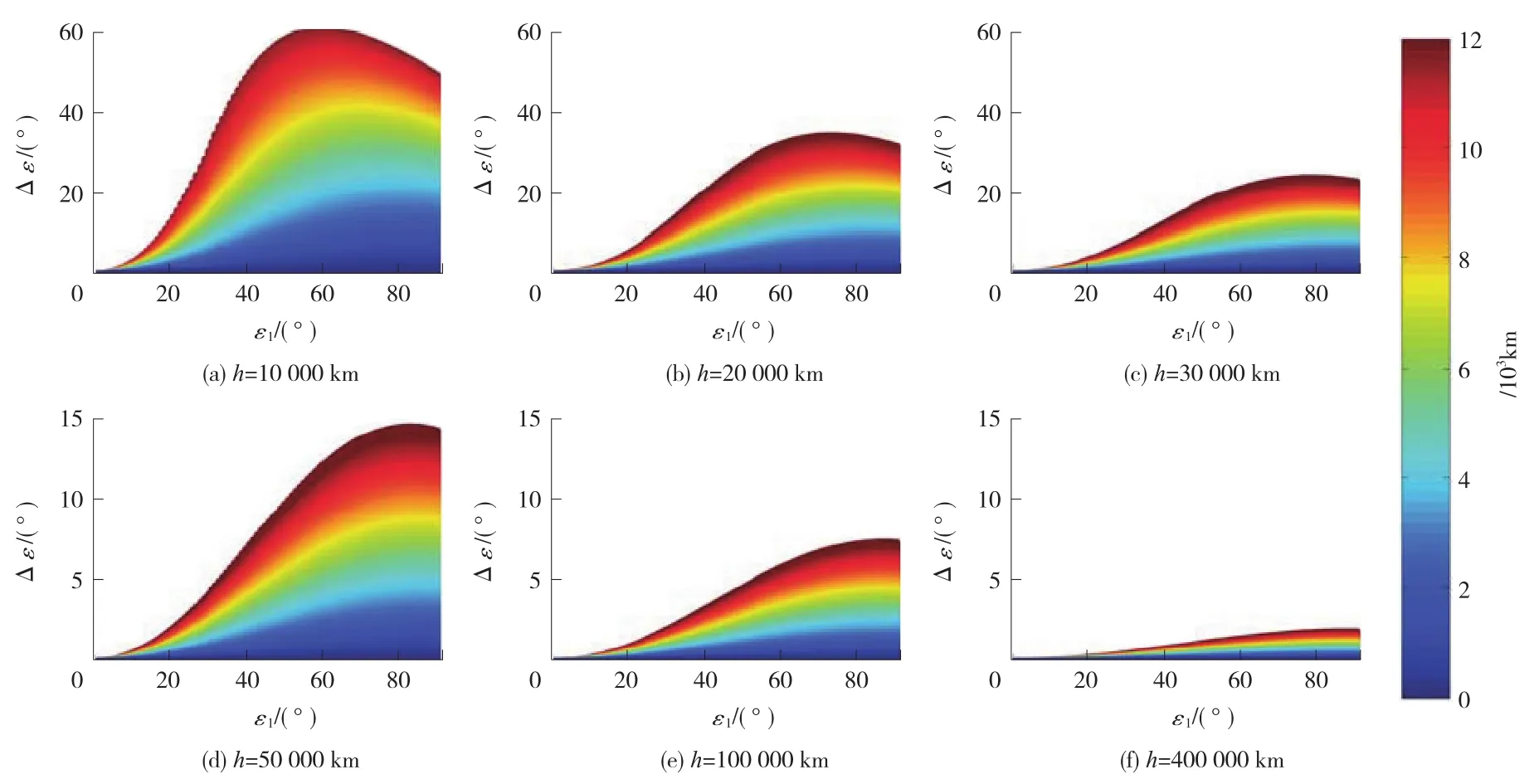
图2 不同基线长度及航天器高度下,两个测站的仰角差Δε与测站1的仰角ε1关系图Fig.2 Separation angleΔεversus elevationε1for various baseline lengths and target heights

图3 仰角为el1并仰角差Δel=el2-el1时,两个传播路径湿延迟差异示意图(天顶湿延迟假设为150 mm)Fig.3 Residual effect on the slant wet delay of two ray paths, separated byΔel=el2-el1,in dependence of the elevation angle el1(A zenith wet delay of 150 mm is assumed)
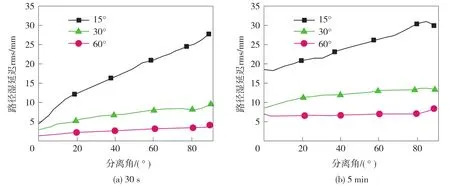
图4 路径湿延迟rms与方位角分离度的关系图Fig.4 Simulated rms of the slant wet delay in dependence of the azimuthal separation angle
下面分析对流层湿延迟随时间和方位角分离性的快速变化。图4画出了两个连续传播路径上延迟的差别,即由时间和方位角方向不同造成的差异。该仿真计算进行了50次并且计算得到的rms值表示预期误差。在仰角30°时(绿线加三角符号所示),由对流层扰动引起的两个连续观测的时延差30 s后(a)并且与初始方位角相差20°时,约5 mm。增加观测时间间隔,例如5 min(b),即使是相同的方位角方向,对流层的扰动也会带来约几个毫米的差异。
关于电离层和传播路径上带电粒子的影响可以通过使用2个或多个频率进行消除。然而当使用D-VLBI技术消除共同介质误差时,需要特别注意信号源的不同距离。比如观测近地球卫星是通过对河外参考射电源的观测来校正,来自近地卫星的信号是受地球的电离层扰动,然而射电源的信号还另外要受到行星际和恒星际等离子体的影响,这将会带来较大的影响[9]。
4 结束语
根据D-VLBI进行深空航天器跟踪的基本原理,提供了观测时间间隔的设置参考,仿真分析了该技术的航天器和参考射电源之间的角距离、传播路径上的介质差异等特性,研究结果对后续深空任务的设计和参数优化配置提供了技术支持。
[1]Thornton C L,Border J S.Radiometric tracking techniques for deep space navigation[M].USA:Wiley-Interscience, 2003.
[2]舒逢春.人造卫星实时射电干涉测量方法研究[D].上海:上海天文台,2008.[Shu F C.Study on the real time application of radio interferometry for satellite tracking[D].Shanghai: Shanghai Astronomical Observatory,2008.]
[3]Shapiro I I,Wittels J J,Counselman C C,et al. Submilliarcsecond astrometry via VLBI.I.relative position of the radio sources 3C345 and NRAO 512[J].The Astron. J,1979(84).10.doi:10.1086/112565.
[4]Wu S C.Connection and validation of narrow-bandΔVLBI phase observations[R].DSN Progress Report,Pasadena, California,Jet Propulsion Laboratory∶1979.
[5]Wrobel J M,Walker R C,Benson J M,et al.Strategies for phase referencing with the VLBA[R].VLBA Scientific Memorandum 24:2000.
[6]Kondo T,Hobiger T,Sekido M,et al.Estimation of scangap limits on phase delay connections in Delta VLBI observations based on the phase structure function at a short time period[J].Earth Planets Space,2009(61):357-371.
[7]Kikuchi F,Liu Q,Matsumoto K,et al.Simulation analysis of differential phase delay estimation by same beam VLBI method[J].Earth Planets Space,2008(60):391-406.
[8]Lanyi G,Bagrid D S,Border J S.Angular position determination of spacecraft by radio interferometry[C]∥Proceedings of the IEEE.[S.l.]:IEEE,2007:2193-2201. [9]Sovers O J,Fanselow J L,Jacobs C S.Astrometry and geodesy with radio interferomtry:experiments,models, results[J].Reviews of Modern Physics,1998,70(4): 1393-1454.
通信地址:北京市5130信箱120分箱(100094)
电话:(010)66365960
E-mail:sunjing@shao.ac.cn
[责任编辑:高莎]
Simulations Models and Analyses on VLBI Spacecraft Tracking
SUN Jing1,WANG Mei1,PING Jinsong1,2
(1.Science and Technology on Aerospace Flight Dynamics Laboratory,Beijing 100094,China; 2.Key Laboratory of Lunar and Deep Space Exploration,National Astronomical Observatories,CAS,Beijing 100012,China)
Differential VLBI(D-VLBI)is commonly used in VLBI spacecraft tracking in order to reach sufficient accuracy.Despite the simple concept of measuring a spacecraft's angular distance to a well-known quasar, this method also holds some characteristics that are worth closer inspection.In this paper,the measurement principle is demonstrated and some basic thoughts on the observation sequence and the resultant scan gaps as well as on the separation angle between the reference source and the spacecraft are presented.This is followed by some geometrical reflections on the similarity of the transmission media.The results in this paper will provide technical support for the subsequent spacecraft mission.
VLBI;D-VLBI;spacecraft tracking
P228;V556
:A
:2095-7777(2014)03-0226-04
10.15982/j.issn.2095-7777.2014.03.011
孙靖(1980—),女,工程师,博士,主要研究方向:VLBI技术,深空探测。
2014-07-25
2014-08-17
北京航天飞行控制中心重点科研课题(ZDKT-13-DLXS-001);国家重点基础研究发展计划(973计划)项目(2015CB857101)
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
国际太空(2022年7期)2022-08-16 09:52:50
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
测绘学报(2018年10期)2018-10-26 06:12:16
国际太空(2018年9期)2018-10-18 08:51:32
城市勘测(2018年1期)2018-03-15 03:37:02
科技视界(2016年15期)2016-06-30 12:48:10
地理空间信息(2013年4期)2013-09-28 07:42:12