
地下空间三维激光扫描双轴同步插补算法研究
2014-03-04 01:36马志,张达,崔昊
中国矿业 2014年2期
马 志,张 达,崔 昊
(1.北京矿冶研究总院,北京102600;2.金属矿山智能开采技术北京重点实验室,北京102600)
近年来,对于地下空间精密探测的需求越来越迫切,但是由于特殊环境的限制,这又一直是困扰测量人员的一大难题。然而三维激光扫描测量技术的出现,可以有效的解决这个问题。BLSS-PE矿用三维激光扫描测量系统,对于矿山环境具有很强的适用性,在地下空间测绘、采空区探测、出矿量回填量等体积计算、爆破效果评估、残矿量分析评价等方面都具有广泛的应用前景[1]。三维激光扫描测量技术,最核心的部分是如何更好的获取地下空间形态,在此基础之上才能进行后期处理。然而,要想准确的获取地下空间的扫描数据,运动控制是其关键技术。以BLSS-PE矿用三维激光扫描测量系统为基础,本文提出了一种双轴同步插补运动控制算法,它在准确获取地下空间三维形态、提高空间形态分辨率方面具有重要意义。
1 矿用三维激光扫描系统组成
BLSS-PE三维激光扫描测量系统主要由扫描主机、电源箱、延长杆、靶标、手持终端、线缆等组成,其中扫描主机是最主要的功能模块,实物如图1所示。扫描系统最常用的支撑方式有两种,其一为通过三脚架适配器直接安装在三脚架上,其二为利用延长杆,将扫描主机伸进采空区或者其他地下空间。架设在单个三脚架上,操作简便;利用延长杆探测,可以增加扫描主机的探测能力,同时保护测量人员远离危险地带。扫描主机通过末端的激光器来采集距离值,通过两个编码器来采集两个角度值,综合这三个测量值,就可以得到三维扫描数据。

图1 扫描主机实物图
BLSS-PE矿用三维激光扫描测量系统的扫描主机具有两个自由度,主要可分为三部分,构成一个两级串联系统,如图2所示。
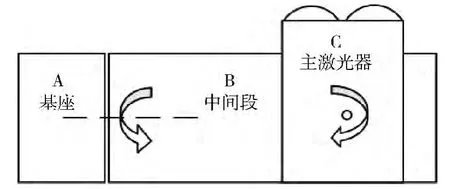
图2 主机结构简图
如图2所示,A部分是基座,固定不动,通过轴向电机与B部分连接;B部分是中间段,放置控制系统;C部分是主激光器,同时也是两个电机轴的执行末端,它通过径向电机与B部分连接。
2 双轴同步插补控制算法
扫描主机以AMR9作为核心控制器,内置WinCE嵌入式处理系统,通过网络端口接收输入指令。控制器通过两个驱动器,来控制两个电机,再分别通过编码器来采集电机运行的速度和位置信息。BLSS-PE矿用三维激光扫描测量系统,是一个两级串联机构,两个自由度分别构成两个闭环控制系统[2],如图3所示。

图3 主机闭环控制系统示意图
主激光器作为两个电机轴的执行末端,也是距离值的测量模块,在地下空间的三维激光扫描过程中,如果两个电机都做匀速转动,就会造成扫描点云疏密不同。这是很多因素造成的,比如目标物到扫描主机的距离、目标物表面轮廓形状、目标物表面反射率以及空气湿度和粉尘浓度等等。要想更准确的获取地下空间的三维形态,就必须协调两个电机同步运动,根据上述影响因素,做出实时调整,令主激光器在地下空间划出不规则的样条曲线。要想提高BLSS-PE矿用三维激光扫描系统在任意地下空间的扫描分辨率,令主激光器在地下空间划出任意不规则的样条曲线,就必须进行样条曲线插补[3],而且是两个电机轴的同步插补。
插补算法就是给出运动曲线上的某些点,然后将这些已知点之间的空间,进行数据密化,从而形成要求的轮廓曲线。要完成上述工作,首先要给出轴向电机运行的一系列位置点P11,P12,P13,P14……以及径向电机运行的一系列位置点P21,P22,P23,P24……。然后将这两个电机轴的运动同步起来,组成二维位置点(P11,P21),(P12,P22),(P13,P23),(P14,P24)……
对于单个电机轴的运动,最主要的是控制已知位置点附近的加减速过程。由于电气系统和机械系统都会存在一定的惯性,使得执行机构的速度不能突变,否则就会引起冲击、震荡或者超调,进而使得整个系统运动精度下降。PVT插补模式可以很好的解决加减速问题,通过给出每一个插补点的位置、速度、时间信息,令执行机构运动出任意形状的样条曲线[4]。在PVT插补模式下,时间T是两个插补点之间的运动周期,加速度与时间成线性关系,则速度是时间的抛物线函数,位置是时间的三次曲线函数。PVT插补模式下,位置、速度、加速度以及加加速度与时间的函数关系,如图4所示。

图4 PVT插补模式控制示意图
在PVT插补模式下,位置是时间的三次函数,则有式(1)。

速度、加速度、加加速度的时间函数分别表示为式(2)、式(3)、式(4)。
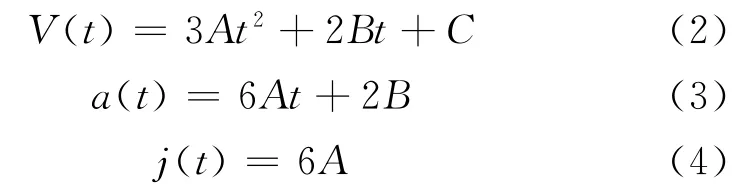
在初始时刻时,系统具有初始位置和初始速度,则有式(5)、式(6)。

完成单轴插补的PVT控制模式,接下来需要为两个驱动器添加同步信号(图5)。为了保证两个电机轴运动同步性,同步信号应该由同一个时钟产生,而控制器是产生同步信号的最佳选择。为了保证双轴同步插补运动顺畅运行,驱动器缓存中应至少放置两个未执行的位置点,并且随时向控制器反馈缓存中位置点的个数以及位置点执行情况。
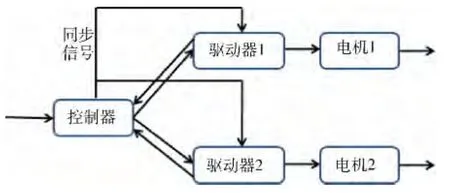
图5 双轴同步插补控制示意图
给定两个电机轴同步插补的位置点(P11,P21),(P12,P22),(P13,P23),(P14,P24)……,位置点之间的运行,采用PVT插补模式,为了保障插补效果,每个插补周期平均为50ms。最后,发送同步信号,间隔500ms,则两个电机轴在同步信号的控制下,进行双轴同步插补,可以运行出任意形态曲线,更准确的获取地下空间形态。
3 矿山环境实际应用
以双轴同步插补为基础的地下空间扫描方式,已经应用在BLSS-PE矿用三维激光扫描测量系统中,并进行了大量的现场实验,且取得了良好的扫描效果。例如在某矿山的-520中断,选取了一个通风条件良好、粉尘浓度较小的采空区,进行了三维激光扫描,现场测试过程如图6所示。

图6 现场测试图
矿山应用扫描效果如图7所示。图7(a)和图图7(b)是同一个采空区的不同视角。由图7可知,这个采空区的扫描点云外形轮廓清晰、且分布均匀。在这个基础之上,测量人员可以借助后期处理软件,进行出矿量或者填充量的体积计算、剖切面提取、地下空间形态测绘、爆破效果评估、采空区稳定性评估、残矿量分析评价等工作[5]。
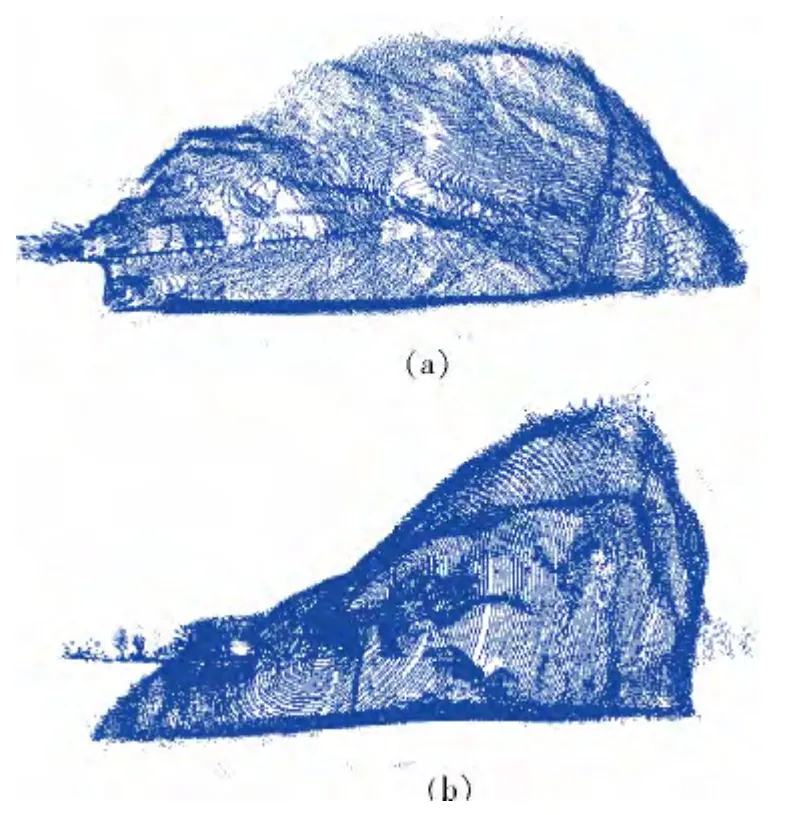
图7 地下空间扫描效果图
4 结论
BLSS-PE矿用三维激光扫描测量系统在地下空间探测方面应用日益广泛,在该系统中应用的双轴同步插补算法,可以使主激光器在地下空间划出任意形态的曲线,进而使扫描系统可以更准确的获取地下空间形态。在矿山环境的大量实验表明,该算法可以有效提高扫描空间分辨率,同时具有很强的适用性。
[1] 陈凯,杨小聪,张达.采空区三维激光扫描变形监测系统[J].矿冶,2012,21(1):60-63.
[2] 陈先锋,舒志兵,赵凯英.基于PMSM伺服系统的数学模型及其性能分析[J].机械与电子,2005,145(1):41-44.
[3] 盖荣丽,王允森,孙一兰,等.样条曲线插补方法综述[J].小型微型计算机系统,2012,12(12):2744-2748.
[4] 舒志兵,严彩忠.PVT插补及位置伺服变加速度处理[J].控制技术,2007(26):86-88.
[5] 过江,古德生,罗周全.金属矿山采空区3D激光探测新技术[J].矿冶工程,2006,26(5):16-19.
猜你喜欢
湖南电力(2021年1期)2021-04-13
图学学报(2020年5期)2020-11-13
制造技术与机床(2017年7期)2018-01-19
电子制作(2017年17期)2017-12-18
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
软件(2017年6期)2017-09-23
制造业自动化(2017年2期)2017-03-20
火控雷达技术(2016年2期)2016-02-06
凿岩机械气动工具(2014年4期)2014-03-01
