基于模糊控制的增程式电动汽车能量分配策略
2014-03-01 02:53盘朝奉韩福强
重庆交通大学学报(自然科学版) 2014年3期
盘朝奉,韩福强,陈 燎,徐 兴,陈 龙
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.江苏大学 汽车工程研究院,江苏 镇江 212013;3.潍柴动力股份有限公司,山东 潍坊 261000)
新能源汽车相对于传统燃油汽车具有排放低、噪声小、操纵简单、维修方便等优点,在环保和节能上具有不可比拟的优势,它是解决人类能源和环境压力的有效途径。因此,新能源汽车是21世纪汽车的发展方向[1]。目前,已上市和正在研究的新能源汽车整车方案主要包括混合动力汽车(Hybrid Electric Vehicle,HEV)、纯电动汽车(Electric Vehicle,EV)、增程式汽车(Extend Range Electric Vehicle,EREV)、双模汽车等车辆形式。
增程式电动汽车与其它不同方案进行对比优势明显:相对于传统燃油车,燃油经济性有效提高,传统机械传动系统复杂机构被去除;相对于EV,在达到同样高效的纯电动运行情况下,具备长距离行驶功能,解决了EV续驶里程不足的问题;相对于HEV,减去了传统的机械混动结构,离合器、变速箱等结构,减轻了重量。
因此,在目前电池技术无重大突破,比能量密度难以较大提高的情况下,EREV相对于已经大量研究的HEV、EV等车辆形式具有很大优势,是新能源汽车发展的重要方向。但目前国内对于EREV的研究还处于起步阶段,因此,有必要深入研究EREV。
1 EREV动力系统结构的选型
在采用串联混动结构的基础上,通过整车能量分配策略设计发动机工作在燃油经济区,可以降低排放。考虑到车辆在电池SOC允许条件下以消耗电能为主,辅助动力系统 (Auxiliary Power Unit,APU)并不启动,因此,在汽车整个行驶过程中,即便部分情况下APU将化学能转换为机械能再转为能驱动整车,效率有所降低,但在城市工况下,整体效率依然占优。因此,笔者采用串联混动结构的EREV动力系统,如图1。串联混动动力系统主要由主动力系统(蓄电池组和驱动电机)、辅助动力系统(发动机和发电机)和减速器等部件组成。辅助动力系统中的发动机仅用于驱动发电机发电,所发出的电能一部分直接供给驱动电机,驱动EREV行驶;一部分电能向电池充电,来延长EREV的行驶里程。另外,蓄电池组还可以单独向驱动电机提供电能来驱动汽车,此时EREV运行在纯电动模式,汽车在零污染状态下行驶。

图1 串联混动结构的EREV动力系统结构Fig.1 EREV power system structure of SHEV
2 基于FC理论的能量分配策略设计
EREV能量分配控制的目的是实现能量在APU和蓄电池之间的合理有效分配,使整车系统效率达到最高,同时获得最优的燃油经济性、最低的排放以及平稳的驾驶性能[2]。
笔者提出基于模糊控制(Fuzzy Control,FC)的稳态能量分配策略,采取双输入、单输出的二维结构,以蓄电池SOC、驱动电机需求功率作为模糊控制器输入,辅助动力单元的需求功率作为输出。
2.1 蓄电池SOC
为了保证蓄电池SOC维持在最佳范围,并避免电池的过充或者过放,结合整车参数及电池性能将SOC的运行区间定为0.3~0.9之间。在电池SOC达到0.9设定电池电量为满,电池电量降至0.3就显示电量已降至0,超过0.9定义为过充,低于0.3定义为过放。
考虑到档级多,规则制定灵活、细致,共设有7个模糊子集,分别是极低(EL)、很低(VL)、较低(LO)、正常(ST)、较高(HI)、很高(VH)、极高(EH)。其中模糊子集正常的取值范围是[0.5,0.7],其隶属度在SOC=0.6时达到最大,此时蓄电池作为主动力源驱动整车运行,车辆运行于纯电动模式。结合大量的实验数据和理论分析,设计了电池SOC的隶属度函数如图2。

图2 动力电池组SOC隶属度函数Fig.2 Membership function of power train batteries
2.2 电机需求功率Pmot
驱动电机作为整车唯一的驱动单元,对电机的选择要考虑到整车的动力性等相关因素。笔者采用的驱动电机为三相交流异步电机,四象限可再生制动,通过拟合得到驱动电机在驱动模式及再生制动模式下的特性曲线如图3。


图3 驱动模式及再生制动模式下的特性曲线Fig.3 Characteristic curves in drive model and regenerative braking model
由于驱动电机可工作在驱动模式和再生制动模式两种不同状态,Pmot作为模糊控制器的输入,取值范围为[-20,88] kW,与实际电机工作功率范围相符,其中需求功率为负值表示电机处于再生制动状态,88 kW是电机的理论最大输出功率值。电机需求功率Pmot包含9个模糊子集,分别为负大(NB)、负小(NS)、正零(ZE)、正小(PS)、正中(PM)、正大(PB)、正很大(PVB)、正极大(PEB)、正超极大(PVEB)。驱动电机Pmot的隶属度函数如图4。

图4 电机需求功率的隶属度函数Fig.4 Membership function of motor needing power
2.3 APU的输出功率Papu
APU的输出功率Papu作为模糊控制器的输出,范围为[0,35] kW。为了能制定出更加详细的控制规则,对电机需求功率Pmot与蓄电池SOC的不同输入组合能做出更加细致的响应,APU输出功率Papu共包含的8个模糊子集,分别为极小(ES),很小(VS), 较小(SM),中等 (MI),较大(BG),很大(VB),极大(EB),超极大(VEB)。隶属度函数如图5。

图5 APU输出功率隶属度函数Fig.5 Membership function of APU output power
2.4 模糊控制规则设计
根据仿真实验和长期积累的经验制定出相应的模糊控制规则库,如表1[3]。

表1 APU功率分配模糊推理规则
功率分配的模糊推理,一共有63条规则,根据模糊输入和规则库中蕴涵的输入输出关系,通过模糊推理得到模糊控制器的输出模糊值,用重心法进行解模糊。
模糊控制系统结构如图6。模糊控制器稳态输出APU的目标功率,APU模块中发电机作为发动机负载,通过PID实现对发动机的转速闭环控制,通过调节发电机在相应转速下的输出功率即可实现发动机的对外输出转矩控制,这样发动机便一直工作在燃油经济区最优曲线上。

图6 模糊控制系统模型Fig.6 Fuzzy control system model
3 基于FC的能量分配策略仿真
通过分析发动机万有特性曲线,依据APU发动机最优工作点连续拟合得到最优工作曲线,如图7中粗线。
在Simulink模型中,二维模糊控制器输出Papu,然后利用发动机的万有特性曲线计算出最小BSFC曲线对应的转速,将转速信号作为目标值发送给PID控制模块,同时检测发动机瞬时转速作为实际值,取差值作为PID控制器输入, PID控制器输出一个取值范围在[0,1]之间的发动机油门踏板开度信号,并将该值赋值给发动机,实现发动机转速的闭环控制。
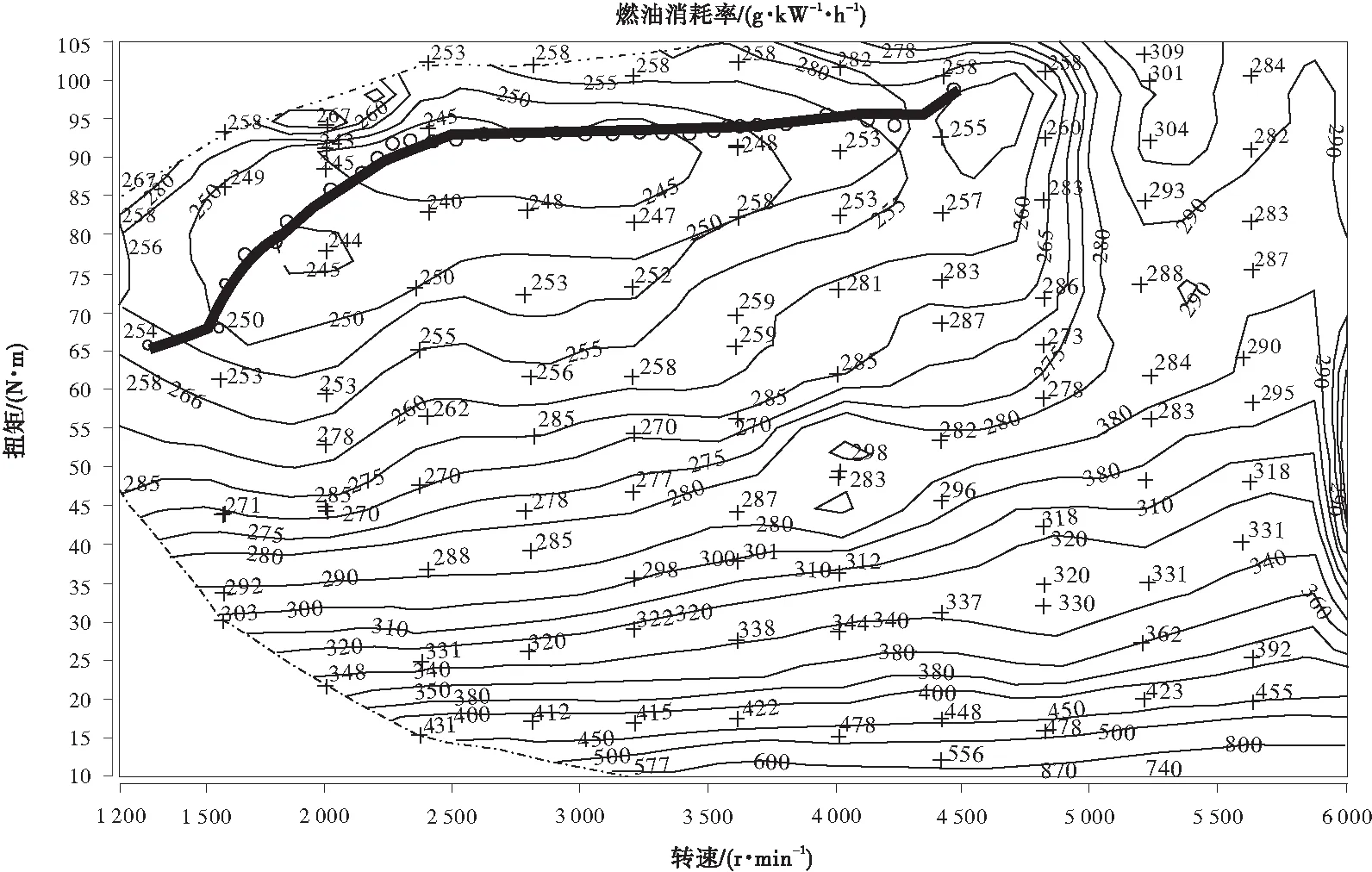
图7 APU发动机运行特性Fig.7 Operation characteristics of APU engine
如图8,为利用发动机燃油经济性最优曲线逆向拟合计算出的最小燃油消耗率曲线对应的目标转速与实际转速的比较,A线为经过模糊控制策略依据实时输入蓄电池SOC与电机的需求功率推算出来的发动机目标转速值。B线为发动机实际转速,对转速进行PID控制。由图8可以看出,它们速度在趋势上保持一致,基本实现了对发动机转速的有效控制。
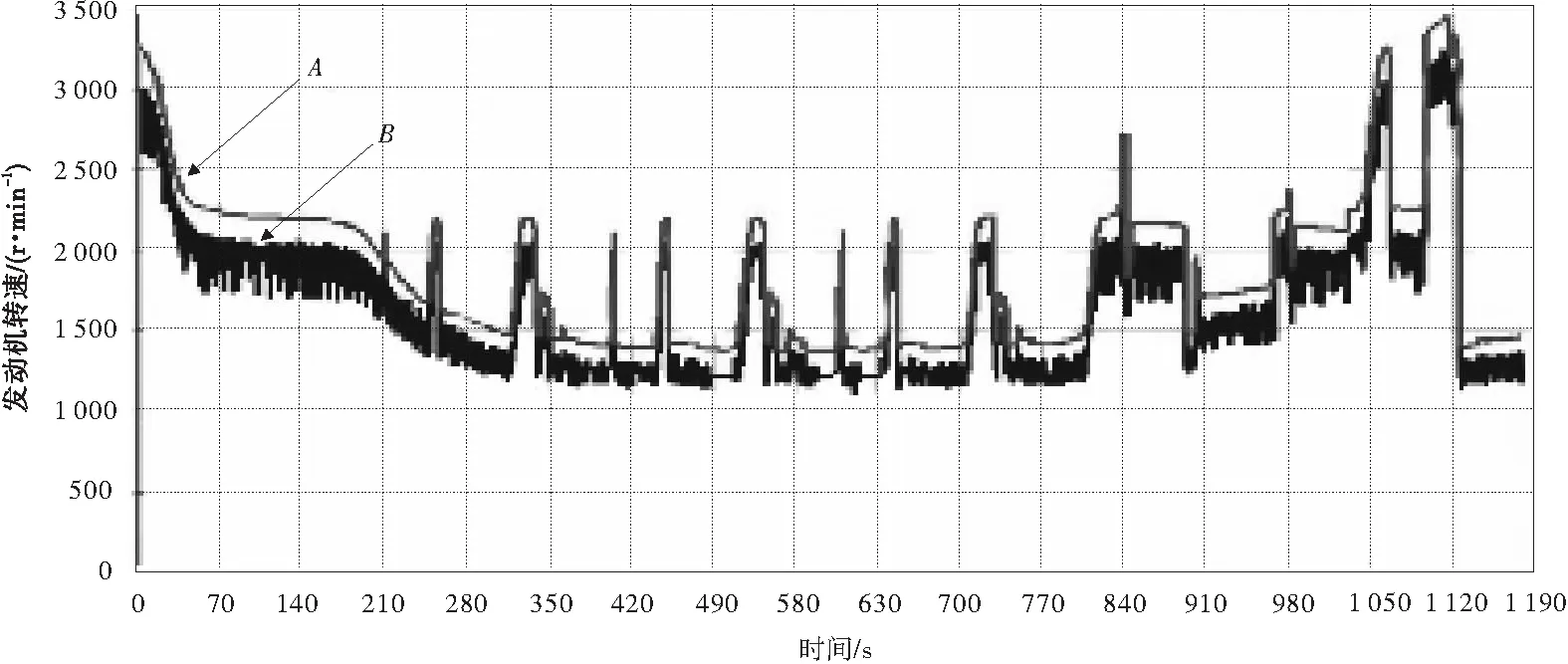
图8 发动机目标转速与实际转速曲线Fig.8 Relationship between engine desire speed and actual speed curve
Cruise搭建整车模型进行NEDC工况测试。仿真参数如表2。
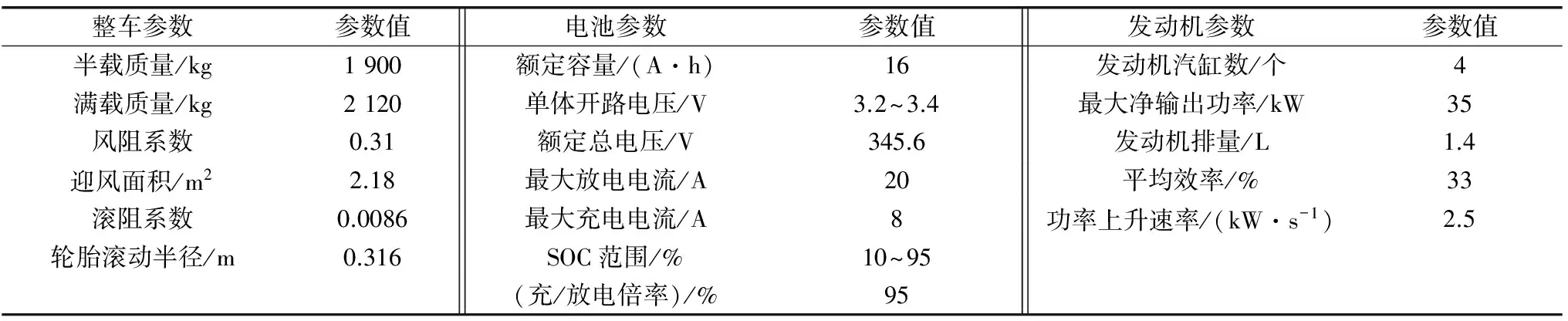
表2 仿真参数
4 仿真结果分析
应用模糊控制策略进行仿真,结果见表3。可以看出应用模糊逻辑控制策略整车油耗明显减少,排放降低,达到了提高EREV系统整体效率的目的。这说明,基于模糊逻辑的能量分配策略能够很好的实现增程式电动汽车的性能优化。
表3性能仿真结果
Table3Performancesimulationresults

性 能仿真结果 动力性最高车速/(km·h-1)131加速性(0~96.6km/h)/s14.5 排放NOx/(g·km-1)0.174CO/(g·km-1)1.743HC/(g·km-1)0.35 续驶里程/km500 油耗/(100km·L-1)5.94 传动系统效率/%16.2
5 结 语
增程式电动汽车能够有效解决纯电动汽车续驶里程不足的问题,笔者结合蓄电池SOC和驱动电机的需求功率提出了基于模糊控制的能量分配策略,通过Cruise与MATLAB/Simulink联合仿真及NEDC工况试验验证了该策略能够有效降低排放,并维持电池SOC在理想范围内。由于车辆实际运行工况复杂,该控制策略需进一步完善,兼顾车辆动力性。
[1] 雷惊雷,张占军,吴立人,等.电动车,电动车用电源及其发展战略[J].电源技术,2001,25(1): 40-46,59.
Lei Jinglei,Zhang Zhanjun,Wu Liren,et al.Electric vehicles, power sources for electric vehicles and their developing strategy in China [J].Chinese Journal of Power Sources, 2001, 25(1): 40-46, 59.
[2] 卢兰光,何彬,欧阳明高.燃料电池城市客车能量分配算法研究[J].机械工程学报,2005,41(12):8-12.
Lu languang,He bin,Ouyang Minggao.Energy management strategies for fuel cell hybrid electric vehicle [J].Journal of Mechanical Engineering, 2005, 41(12): 8-12.
[3] 窦国伟,马涛峰,马先萌.基于模糊控制算法的增程式电动车能量分配策略[J].上海汽车,2012,3(3):10-14.
Dou Guowei,Ma Taofeng,Ma Xianmeng.A kind of distribution control strategy for extended range electric vehicle based on fuzzy control technology [J].Shanghai Auto, 2012, 3(3): 10-14.
[4] 段岩波,张武高,黄震.混合动力汽车模糊逻辑控制策略仿真[J].内燃机工程,2003,24(2):66-69.
Duan Yanbo,Zhang Wugao,Huang Zhen.Simulation of fuzzy logic control strategy for HEV [J].Chinese Internal Combustion Engine Engineering, 2003, 24(2): 66-69.
[5] 姜海斌.纯电动车整车控制策略及控制器的研究[D].上海:上海交通大学,2010.
Jiang Haibin.Research on Vehicle Control Strategy and Controller of Electric Vehicle[D].Shanghai: Shanghai Jiaotong University,2010.
[6] 安东尼·索左斯基. 混合电动车辆基础[M].陈清泉,孙逢春,译.北京:北京理工大学出版社,2001:109-118.
Antoni Szumanowski. Hybrid Electric Vehicle Basic[M].Chen Qingquan,Sun Fengchun, translation.Beijing:Beijing Institute of Technology Press,2001:109-118.
[7] Tate E D,Harpster M O,Savagian P J.The electrification of the automobile:From conventional Hybrid,to Plug-in Hybrids,to Extended- Range Electric Vehicles[C]//Advanced Hybrid Vehicle Powertrain: Proceedings of the SAE 2008 World Congress & Exhibition.Detroit,MI: SAE,2008:1-11.
[8] Jalil N,Kheir N A,Salman M.A rule-baed energy management strategy for a series hybrid vehicle[C]//Proceedings of the American Control Conference.Albuquerque,New Mexico:IEEE,1997:689-693.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
西北工业大学学报(2015年1期)2016-01-19
噪声与振动控制(2015年4期)2015-01-01