视线离开前方区域时的驾驶人操作行为
2014-03-01 02:53郭应时宋殿明
重庆交通大学学报(自然科学版) 2014年3期
王 畅,郭应时,付 锐,袁 伟,宋殿明
(长安大学 汽车学院,陕西 西安 710064)
0 引 言
驾驶人正常驾驶过程中通常最为关注自车的前方区域,但实际驾驶过程表明,驾驶人除了对前方区域进行观察之外对其他区域也会进行观察,如后视镜、车内仪表、路边风景或其他非交通对象等[1-2]。正常情况下,驾驶人对非前方区域的观察时间较短,并且次数较少,但一旦驾驶人受到其他对象的干扰而对非前方区域投入过多的观察行为时,驾驶人对车辆行驶状态的把握程度将严重下降,从而引发驾驶人注意力分散问题。例如,行车过程中驾驶人使用移动电话、被路边无关紧要的对象所吸引等情况下的行车过程存在一定风险。
针对驾驶人的注意力分散问题,J.L.Harbluk,等[3]研究了使用移动电话对驾驶人的视觉特性和车辆操作方式的影响;R.Karlsson[4]研究了驾驶人处于注意力分散状态下的转向行为。正常驾驶过程中,驾驶人会经常出现视线离开前方区域的行为,而注意力分散的直接表现就是视线离开前方区域,因而,如何界定正常的视线离开前方区域行为和注意力分散成为一个重要的问题。此外,要分析驾驶人注意力分散情况下的驾驶操作行为特征,首先需要确定正常视线离开前方区域时的驾驶操作行为特征。针对此问题,笔者通过对多名被试在真实道路上进行自然驾驶试验,采用眼动仪追踪记录驾驶过程中驾驶人的注视数据,并同步采集驾驶人的操作行为数据和车辆运动状态数据,对视线离开前方区域时的驾驶人操作行为进行分析。
1 试验数据来源
1.1 注视行为监测仪器
试验过程中采用非接触式眼动仪FACELAB对驾驶人的注视行为进行监测,该眼动仪在使用过程中不需要驾驶人佩戴任何设备,克服了传统头戴式眼动仪对驾驶过程存在干扰的缺点,其能够采集到完全符合正常驾驶过程的注视数据,且长时间连续工作能力较强。FACELAB眼动仪利用场景摄像机同步记录试验过程中自车的前方视频,并与驾驶人注视区域数据进行视频渲染叠加,形成带注视点的前方道路视频,从而使得后续注视行为分析过程更加直观和有效。FACELAB眼动仪的采样频率为60 Hz,注视角度测量精度为0.5°,其安装于试验车仪表盘上方,镜头朝向驾驶人安装,如图1。

图1 眼动仪安装位置Fig.1 Install place of eye movement tracker
1.2 驾驶人操作行为监测仪器
正常驾驶过程中,驾驶人的主要操作行为体现在速度控制和方向控制方面,因此试验中重点监测驾驶人对方向盘、加速踏板、制动踏板以及转向灯等的操作。利用CAN总线数据采集卡,在工控机平台下自行设计开发了多通道同步CAN总线数据采集程序。同时,试验车上还安装了测距雷达、差分GPS系统等仪器,所使用的试验车如图2。

图2 试验车Fig.2 Test vehicle
1.3 车辆运动状态监测设备
车辆的运行状态由车辆的速度、车辆在各个方向上的加速度和角速度、车辆相对于车道线的距离,车辆行驶轨迹等。笔者通过在试验车上安装三轴陀螺仪、车道线监测系统等仪器,并结合CAN总线数据采集卡,实现了对车辆运行速度、纵向加速度、横向加速度、横摆角速度、俯仰角速度、车辆与车道线距离、车辆运行轨迹等参数的同步采集。利用数据同步软件,实现了车辆运动状态数据、驾驶人操作行为数据和眼动仪注视行为数据的同步。
1.4 被试驾驶人与试验线路
试验过程中以自愿原则召集了6名被试参加试验,所选择的被试均身体健康,无心脑血管疾病。6名被试的平均年龄为38.3岁,平均驾龄为10.8年。驾驶试验过程中对驾驶人没有提出任何要求,只需按照指定的试验线路正常驾驶即可,对行车速度等不作任何要求。
试验线路包括了高速公路与国道。相比于其他道路,高速公路上车辆行驶速度块,因此注意力分散带来的事故隐患也更大。因此笔者只对高速公路情况下的视线离开前方区域行为进行分析。所选择的试验线路为双向四车道的干线高速公路,路线全长57.4 km,道路限速100 km/h,试验线路中无隧道、特大桥梁等特殊路段。
2 驾驶人操作行为分析
2.1 视线离开前方区域的定义
行车过程中,驾驶人的注视行为呈现复杂多变的特性。为分析驾驶人注视点在不同区域或者不同目标上的注视行为,通常采取对注视区域进行划分的办法,进而分别研究驾驶人的注视行为特性。笔者研究目的在于分析驾驶人视线离开前方区域时的操作行为,因而首先需要定义出前方区域的概念。参考其他研究人员的结论[7-8],并结合实际试验过程特点,笔者对驾驶人的注视区域划分方法如图3。

图3 注视区域划分方法Fig.3 Division method of gazing area
根据图3,利用眼动仪所记录得到的注视点视频,对驾驶过程中驾驶人的注视区域进行分析,当驾驶人注视点没有落在前方区域时,即驾驶人对左后视镜、右后视镜、车内区域或其他区域进行观察时,即可认为当前驾驶人的视线离开了前方区域,进而对这种状态下的驾驶人操作行为数据进行分析。
2.2 视线离开前方区域时操作行为总体概况
截图某次视线离开前方区域时驾驶人的操作行为数据,以时间为横轴,相关操作行为数据为纵轴,对视线离开前方区域时的操作行为数据进行初步分析,结果如图4。

图4 时间窗内的参数变化Fig.4 Parameters variety in time window
图4中,阴影区域为驾驶人视线离开前方区域区间,驾驶人视线在0.6 s左右开始离开前方视野而观察仪表盘,这个过程持续了1.1 s。在1.7 s左右,驾驶人的视线重新回到前方区域,即图4中阴影区域覆盖所代表的这段时间。相比于视线未离开前方区域时,驾驶人的视线离开前方区域后,操作行为具有以下特征:
1)方向盘角速度稳定,无明显波动。而正常驾驶情况下方向盘角速度呈现出一定的波动。这表明驾驶人视线离开前方区域之后,由于无法正确感知前方道路场景,因而驾驶人控制方向盘保持当前状态,从而使得方向盘角速度为0。
2)加速踏板开度呈现出下降趋势,驾驶人视线转移回前方区域之后踏板开度重新上升。这表明,驾驶人视线离开前方区域之后,驾驶人对前方道路的感知把握程度下降,从而使得驾驶人下意识的松开部分加速踏板,提高对车辆行驶状态的把握程度。
3)车道偏离距离持续变化。这表明视线离开前方区域之后,由于方向盘失去了微调过程,从而使得车辆的行驶轨迹发生变化,并使得车辆相对于车道中心发生持续位移。如果驾驶人不对方向盘进行调整,则会使得车辆偏离出车道,典型的疲劳驾驶过程引发的冲出道路事故发生机理就体现在此处。
4)车速呈现轻微的下降趋势,但趋势不明显。图4中车速呈现出一定的下降过程,但在视线离开前方区域时的下降量不超过1 km/h,这与正常驾驶过程中的车速波动范围接近,从而无法确认车速的下降是驾驶人的主观行为引起还是车速的正常变化范围。
以上过程为某一次视线离开前方区域时的相关操作行为数据变化过程,类似的,笔者对大量视线离开前方区域时的驾驶操作行为数据进行了分析。
2.3 方向盘稳定性
视线离开前方过程中,驾驶人的转向操作行为可以由方向盘的转动角速度来表征,具体处理方法如下。首先,求取视线离开前方区域过程中方向盘转动角速度的平均值。然后,选择该过程之后2 s的方向盘转动数据作为正常情况下的对比数据,按照同样的办法求取对比数据中转向角速度平均值。以此类推,将所有视线离开前方区域时的数据都筛选对比数据,得出两种情况下转向角速度平均值的箱线,如图5。

图5 方向盘转向角速度箱线Fig.5 Box line diagram of angular velocity of steering wheel
图5中,左侧的箱线图表示视线离开前方区域时所有角速度均值的分布特性,而右边的箱线图则是视线未离开前方区域时的对比角速度均值的分布。对比两个箱线图知:左侧箱线图的4分位数均较小,并且箱线图的箱体整体较小。采用独立样本T检验方法对两类数据进差异性检验,p= 0.012 < 0.05,从而二者之间存在显著的差异性。左侧箱线图中数据的平均值为0.325(°)/s,标准差为0.578(°)/s,而右侧箱线图中数据的平均值为0.853(°)/s,标准差为0.858(°)/s。
综上,视线未离开前方时驾驶人的转向行为要比视线离开前方区域时的转向行为灵活,原因在于驾驶人不断观察前方区域的情况后会实时的对车辆运动状态进行持续的微调,从而使得车辆适应道路线形的变化。相反的,驾驶人视线离开前方区域后将失去对前方道路线形的把握,从而为了安全起见驾驶人将紧握方向盘防止车辆发生偏离现象而引发交通事故,直接表现为方向盘的转动行为稍显僵硬,这是由于驾驶人的潜在谨慎性而决定的。
2.4 车道保持特性
试验过程中,车道线识别系统实时监测自车与左侧车道线的距离L1、自车与右侧车道线的距离L2。基于上述两参数,同时结合自车的宽度,可以计算出车辆中心线偏离车道中心线的距离J。车辆纵轴中心线在车道平面上的投影线与车道中心线的距离J用于表征驾驶人控制车辆在车道内横向位置保持稳定的能力。J值越大,则表明驾驶人的横向控制能力越差,车辆相对于车道中心线的漂移情况就越严重。J按式(1)计算:
(1)
数据处理过程中,对于驾驶人视线离开前方区域的数据,采用式(1)计算参数J。同时对每个视线离开前方区域的阶段,计算该阶段内参数J最大值和最小值的差值。该差值即表明了这一次视线离开前方区域过程中车辆相对于车道中心线的偏离幅度Js。根据大量实测数据,按照时间长短(单位:s)将视线离开前方区域数据分为(0, 0.5),[0.5, 1.0),[1.0,2.0)等3类。对这3类数据分别求取参数Js,并计算Js的均值。相应的,对驾驶人视线未离开前方区域时的数据进行同样处理,得到驾驶人的车道保持能力与视线离开前方区域时长之间的关系,如图6。

图6 车道偏离幅度Fig.6 Range of lane departure
图6中,横坐标为3类时间长度,而纵坐标则是相应时间长度情况下的两类Js均值。图中曲线表明,对于视线离开前方区域和视线未离开前方区域两类情况,车道偏离幅度的均值都随着时长的增加而逐渐上升。时长<0.5 s时Js均值相差不多,而在[0.5 s,1.0 s)和>1.0 s两种情况下,视线离开前方区域时的均值要明显大于视线未离开前方区域的数据。这表明,驾驶人视线离开前方区域时间越长,则车辆在车道内横向位置发生变化的可能性也越大,从而引发车道偏离的概率也将大大增加。
2.5 加速踏板开度变化特性
筛选驾驶人视线离开前方区域时的车辆加速踏板开度数据,以视线离开前方区域时间长度为横坐标,绘制加速踏板的开度变化量ΔP曲线,如图7。
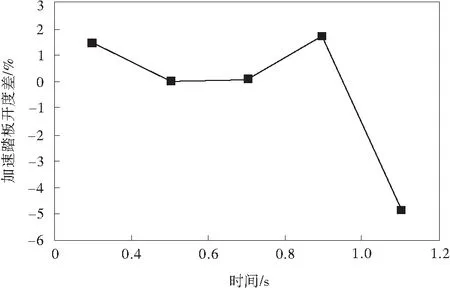
图7 加速踏板开度随时间区间的变化Fig.7 Stretch degree of accelerate pedal charging with the time
图7表明,当驾驶人视线离开前方区域持续的时间≤1.0 s时,车辆加速踏板的开度基本保持在0%左右,这表明加速踏板开度基本保持稳定。而当持续时间超过1.0 s以后,加速踏板开度呈现迅速的下降,这表明车辆的加速踏板出现了迅速释放的特点。分析其原因,当驾驶人视线离开前方区域时间超过1.0 s以后,驾驶人对于车辆的控制把握心理程度出现明显的下降,驾驶人无法准确感知车辆的运行速度、横向稳定性等参数,从而下意识的松开加速踏板以降低车辆的行驶速度。速度的降低意味着车辆安全性的增加,这是驾驶人内在潜在特性的外部直接表现。随着视线离开前方区域时间的进一步增加,驾驶人释放加速踏板的概率也将随之增加。
2.6 行驶速度特性
速度控制行为是驾驶人对车辆操控能力的重要表征因素。筛选视线离开前方区域过程中的车辆运行速度数据,采用视线离开前方区域过程结束时的车速与该过程开始时的车速差ΔV表示。ΔV>0表示经过视线离开过程后车辆行驶速度增加;反之则表示速度降低或者保持不变。统计视线离开前方区域时的速度变化特性,结果如图8。
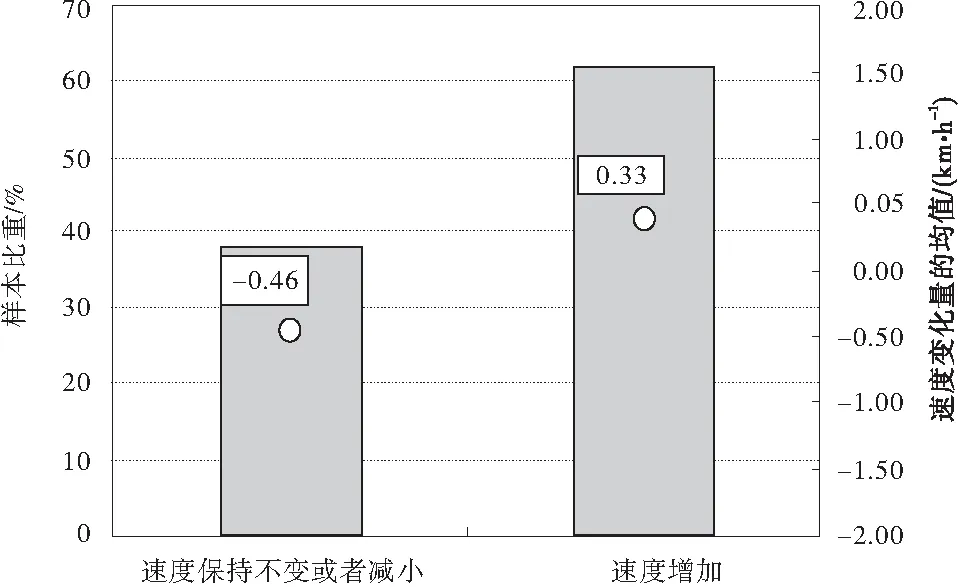
图8 速度变化特性Fig.8 Velocity variety characteristics
图8表明,驾驶人视线离开前方区域过程中, 38.14%的样本出现了速度下降,而其他的样本数据均出现速度上升。加速踏板的释放特性表明,视线离开前方区域后驾驶人会出现释放加速踏板的趋势,从而车速也应该出现相应的下降。但图8中数据没有出现此类规律。分析车辆在道路上的实际运行过程,车辆在高速公路上行驶时,车辆的运行速度会受到多方面因素的影响,最直接的因素包括道路的坡度、风阻系数、车辆动力传递系统对加他踏板的响应特性等。高速行驶时,驾驶人轻微的松开加速踏板后,车辆的速度并不会出现迅速的下降,原因在于高速行驶时的状态没有被打破,从而图8的结论与文中的结论有一些偏差。
一般认为,当驾驶人视线离开前方区域时车辆速度应该会降低,但图8数据表明,速度增加或不变的比例反而占到了大部分。分析其原因为:高速行驶过程中,车辆的行驶速度受到多种因素的影响,主要的因素包括风阻、道路坡度、发动机与传动系统对加速踏板的响应时间等。当驾驶人轻微的踩下或者松开加速踏板时,车辆的速度并不能立即得到响应,从而图8所得到的结论无法和图7所示结论相匹配。此外,车辆正常行驶过程中车速也会存在一定的波动,且波动范围与-0.46 km/h或0.38 km/h处于相同范围,因而使得速度参数无法正确反应驾驶人视线离开前方区域时的操作行为,但加速踏板的释放过程则清晰的表征了驾驶人的驾驶特性。
3 结 论
1)通过利用非接触式眼动仪、车道线监测系统、CAN总线采集卡,基于小型试验车对多名被试进行了实际道路驾驶试验。基于试验所采集数据,对高速公路环境下驾驶人视线离开前方区域时驾驶人的操作行为进行了研究。
2)视线离开前方区域和视线停留在前方区域时方向盘的转动角速度存在显著差异,视线离开前方区域后驾驶人的转向操作行为要差于正常情况。
3)视线离开前方区域时,驾驶人的车道保持能力会相应的下降,车辆发生车道偏离的可能性增加。
4)视线离开前方区域后,随着离开时长的增加,驾驶踏板开度呈现下降的趋势,但此过程中加速踏板与车速之间的变化特性并不明朗。
[1] Sivak M.The information that drivers use: is it indeed 90% visual.[J].Perception,1996, 25(9): 1081-1089.
[2] Sodhi M,Reimer B,Llamazares I.Glance analysis of driver eye movements to evaluate distraction [J].Behavior Research Methods,Instruments & Computers, 2002, 34(4): 529-538.
[3] Harbluk J L,Noy Y I,Eizenman M.The Impact of Cognitive Distraction on Driver Visual Behavior and Vehicle Control [R].Ottawa:Transport Canada, 2002.
[4] Karlsson R.Evaluating Driver Distraction Countermeasures [D].Sweden: Linköping University, 2004.
[5] 张良力,吴超仲,黄珍,等.汽车驾驶行为试验系统信息采集模块设计与实现[J].武汉理工大学学报,2012,34(5):77-81.
Zhang Liangli,Wu Chaozhong,Huang Zhen,et al.Design and implement of information collecting module embedded in a real-vehicle experimental system for driving behavior study[J].Journal of Wuhan University of Technology, 2012, 34(5): 77-81.
[6] 蒋文娟,黄海斌.基于预瞄驾驶员模型的车辆操控稳定性分析[J].重庆交通大学学报:自然科学版,2011,30(6):1420-1424.
Jiang Wenjuan,Huang Haibin.Stability analysis for a vehicle control system based on a spatial previewed driver model [J].Journal of Chongqing Jiaotong University: Natural Science, 2011, 30(6): 1420- 1424.
[7] Brackstone M A,Waterson B J.Are we looking where we are going an exploratory examination of eye movement in high speed driving[C]//Proceedings of the 83rdTransportation Research Board Annual Meeting.Washington,D.C: TRB, 2004: 2602-2626.
[8] Klauer S G,Dingus T A,Neale V L,et al.The Impact of Driver Inattention on Near-Crash/Crash Risk:An Analysis Using the 100-Car Naturalistic Driving Study Data [R].Washington,D.C.:National Highway Traffic Safety Administration, 2006.
猜你喜欢
车主之友(2022年6期)2023-01-30
特区文学·诗(2021年6期)2021-12-22
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
知识经济·中国直销(2018年3期)2018-04-12
金色少年(奇趣科普)(2017年11期)2017-11-28
传媒评论(2017年8期)2017-11-08
黄河之声(2017年13期)2017-01-28
当代贵州(2015年19期)2015-06-13
汽车零部件(2014年5期)2014-11-11