平带系统非线性振动实验研究*
2014-03-01 08:41:30宫苏梅张伟
动力学与控制学报 2014年4期
宫苏梅 张伟
(北京工业大学机电学院,北京 100124)
引言
带传动是一种应用十分广泛的柔性件传动,它具有结构简单、传动平稳、能在远距离内以最少构件传递大功率等优点.其中,传动带是带传动系统中一个关键部分,连接主动轮与从动轮,但由于其刚度低使得带在运动的过程中产生较大的横向振动.
平带驱动系统的特点是包含张紧装置,可以调节带的张紧程度使带的张力在一定范围内保持为设定值.尽管平带驱动系统的使用已使得发动机运转过程中的噪声和振动大为减小,但为改进设计仍有必要分析系统的振动特性和振动响应,相关问题近年来取得若干进展[1,2].平带驱动系统振动分析的重要方面是对转动振动的研究,此时滑轮绕其固定的中心转动,滑轮间的带作弹性伸缩.Kraver等[3]采用复模态分析法研究振动响应,其中的非线性干摩擦阻尼根据耗散能量相等的准则等效为线性粘性阻尼,结果与已有的实验值基本吻合.李滨城等[4]通过实验指出带传动装置的横向振动特性以及工作负荷对传动带的振动有着重要的影响.Tokoro和Nakamura[5]用实验方法研究了齿形同步带的横向振动,发现张力的波动周期对振动有很大的影响.张红星[6]等用实验的方法研究了粘弹性传动带的横向振动,发现了同步带在转动过程中存在周期运动及混沌运动等现象.刘义伦[7]等运用实验手段来分析磁力激励以及非线性对金属带的横向振动影响水平.研究了金属传动带的横向振动幅频响应曲线和金属传动带在不同的非线性项的情况下横向振动幅频响应曲线,实验结果与理论分析的结果相同.
本文搭建了平带系统实验平台,通过对带在运转过程中的横向振动进行测量分析,总结出带传动系统转动时的振动响应.
1 实验设备及原理
实验装置包括安川公司的SGMPH-01AAA2S型伺服电机及SGDM-02ADA型控制器,日本Keyence公司的LK-G80型激光位移传感器及LK-GD500型传感器控制器,研华公司的PCI-1710U型多功能数据采集卡,以及计算机和平带.实验装置如图1:

图1 平带系统实验装置Fig.1 Experimental equipments of flat-belt system
为使传动带在运转的过程中转动平稳,不发生跑偏,设计时增加了轮子的导轨设计.
计算机通过研华PCI-1710U多功能控制卡输出0~10V的模拟量到伺服电机控制器,电机的转速便会随电压的变化而变化.当驱动电机的转速改变时,带中的张紧力也会随之变化,传动带的横向振动也会发生变化.
激光位移传感器进行数据采集时,用传感器自带的LK-Navigator软件将采集到的横向振动位移存储在计算机内.激光位移传感器的工作原理是,传感器向传动带发出一束激光,通过镜头将反射的光斑投影到传感器的线阵CCD上,检测及转换电路通过检测到的位移转换成电压值,计算机内的多功能采集卡将采集的电压通过计算机计算出带的振动位移.实验中采样频率设为1000Hz.
2 实验结果与数据分析
2.1 平带系统匀速转动下的实验研究
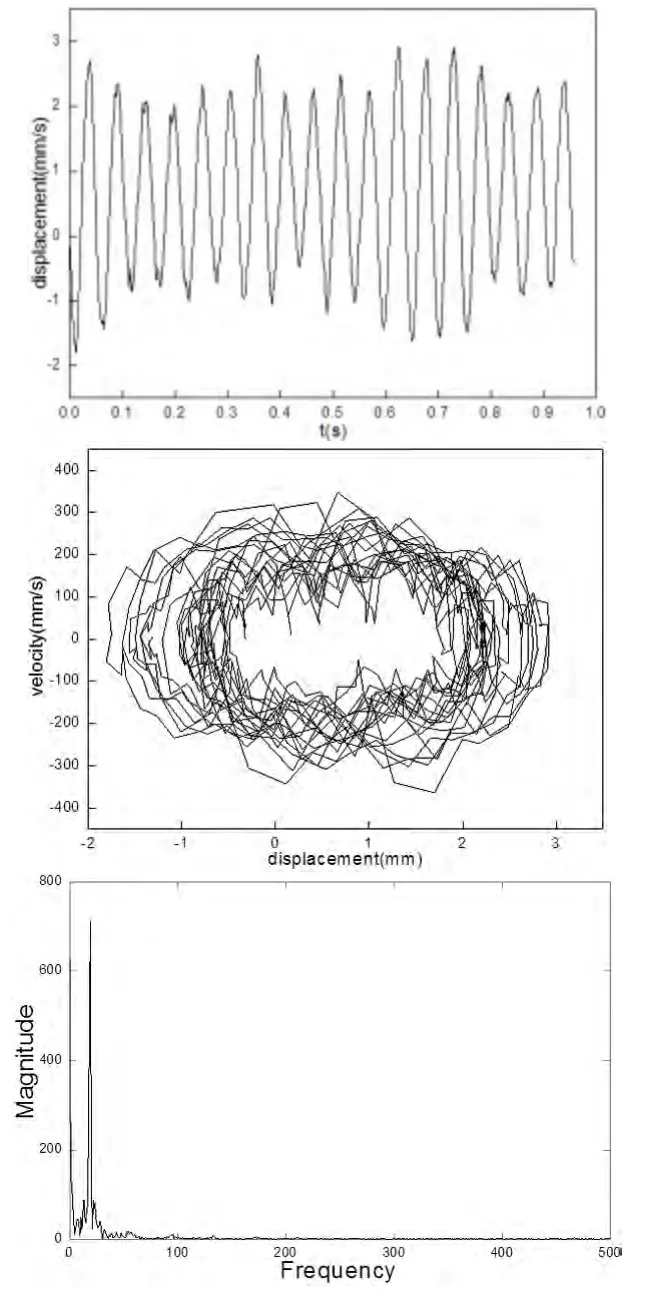
图2 V=500r/min一倍周期运动Fig.2 V=500r/min Period-one motion
传动带上一点的横向振动位移随时间变化的响应情况,每一个分析结果包括3部分,波形图、相图及频谱图.波形图的横轴为时间,单位为秒,纵轴为该点的横向位移,单位为毫米.相图的横轴为振动的位移,纵轴为该点的当时的移动速度,是通过对位移数值微分得到的,单位为毫米每秒.频率谱图为振动的频域响应,横轴为频率,纵轴为振动中该频率下的能量,该图中只给出了能量的比例关系,没有具体单位.下面是平带在不同转速下的振动响应.
当电机转速以V=500r/min匀速转动时,振动的响应结果如图2:
当电机转速为800r/min时,振动响应结果如图3:
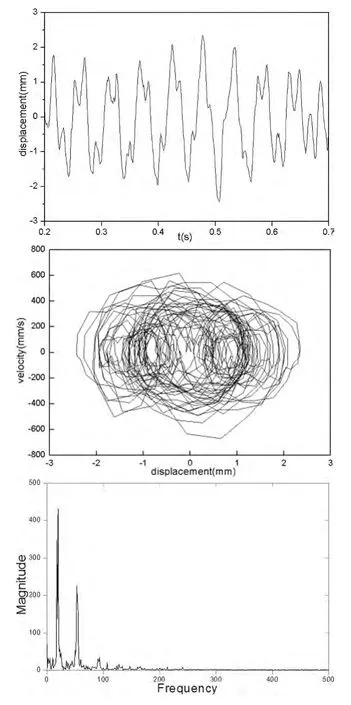
图3 V=800r/min二倍周期运动Fig.3 V=800r/min Period-two motion
电机转速为1100r/min时,振动响应结果如图4:

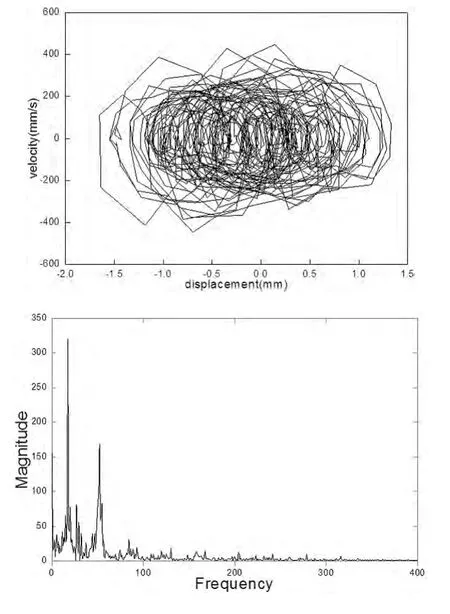
图4 1100r/min混沌运动Fig.4 V=1100r/min Chaotic motion
由上述实验分析可知:平带系统在匀速转动的过程中存在周期运动、倍周期运动以及混沌运动现象.
2.2 平带系统在参数激励下的实验结果
实验通过控制程序输出电压值控制电机转速,可输出带有正弦激励的扰动电压,设为V=V1+V2sin(wt),电机的基本转速由V1控制,扰动电压由V2控制,激励频率为f=本实验主要研究平带系统在参数激励下的振动响应情况.选取电机的基本转速为500r/min,扰动速度为30r/min,激励频率15Hz-28Hz.

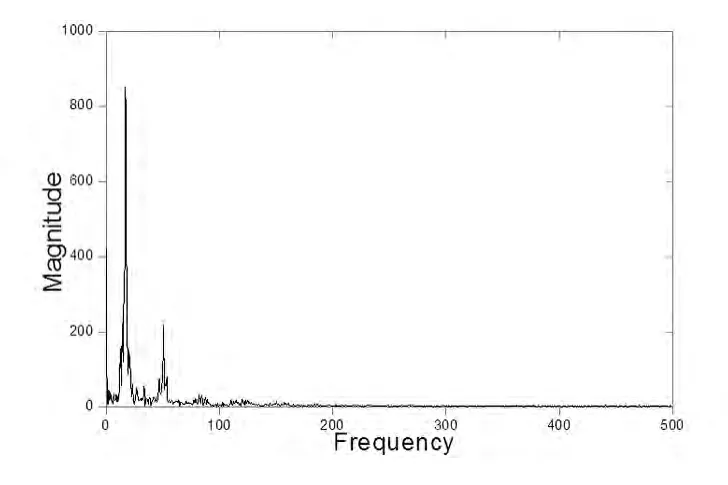
图5 V1=500r/min V2=30r/min f=15.8Hz二倍周期运动Fig.5 V1=500r/min V2=30r/min f=15.8Hz Period-two motion
当电机转速为500r/min,扰动转速为30r/min,激励频率为15.8Hz时,振动结果如图5:
当电机转速为500r/min,扰动转速为30r/min,激励频率为19.4 Hz时,振动结果如图6:
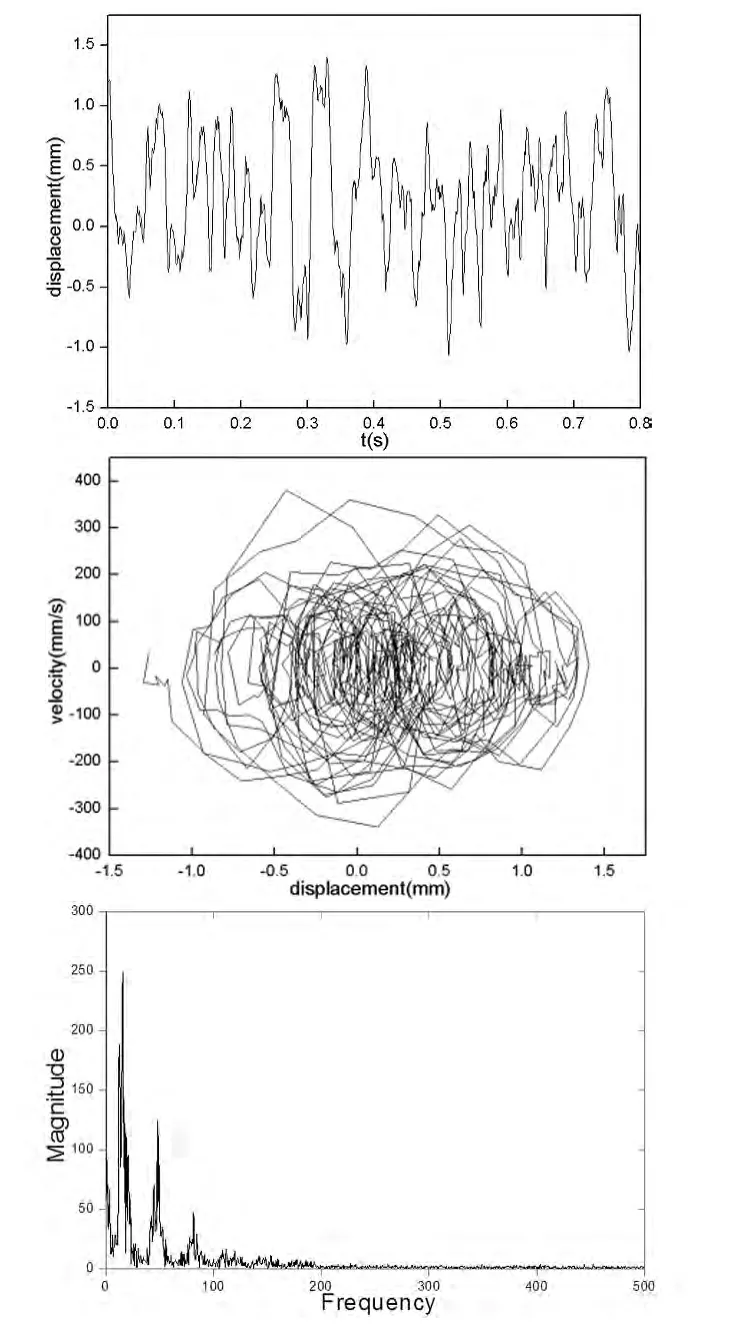
图6 V1=500r/min,V2=30r/min f=19.4Hz混沌运动Fig.6 V1=500r/min,V2=30r/min f=19.4Hz Chaotic motion
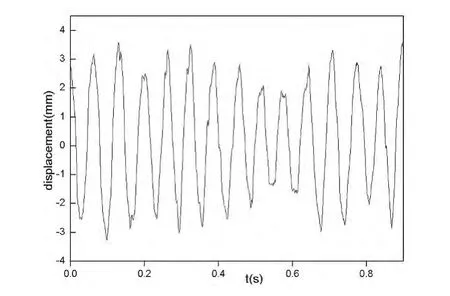
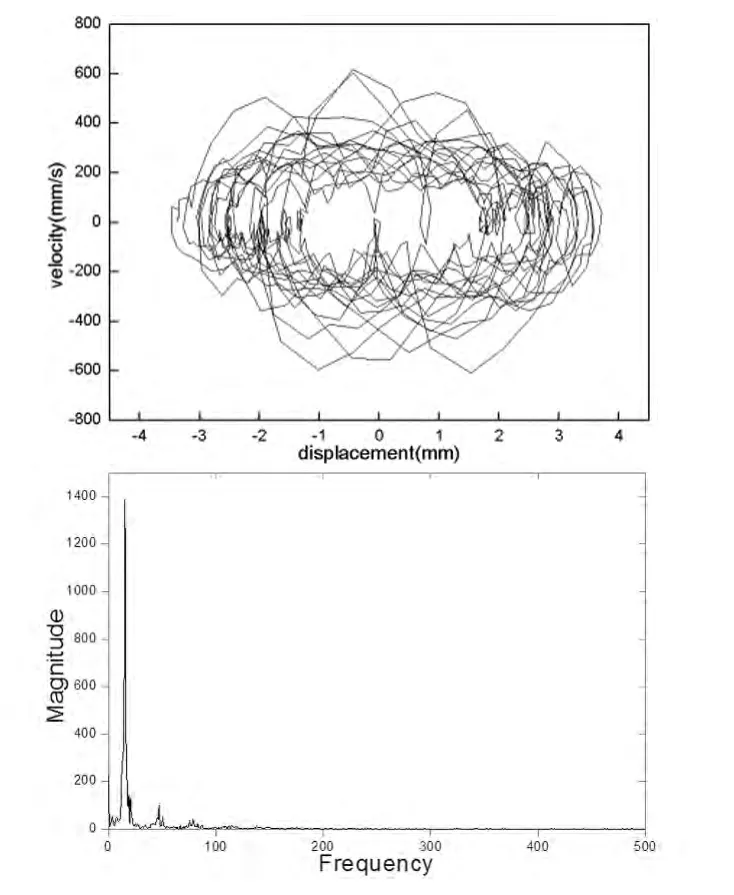
图7 V1=500r/min,V2=30r/min,f=26.2Hz一倍周期运动Fig.7 V1=500r/min,V2=30r/min,f=26.2Hz Period-one moyion
当电机转速为500r/min,扰动转速为30r/min,激励频率为26.2 Hz时,振动结果如图7:
没有参数激励情况下,电机以基本转速500r/min转动时的振动结果如图8:
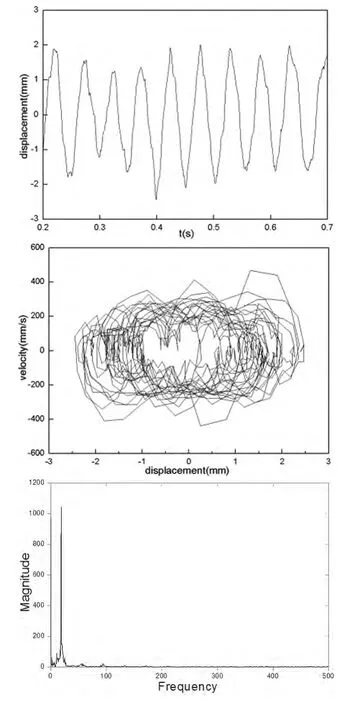
图8 V=500r/min一倍周期运动Fig.8 V=500r/min Period-one motion
由实验结果分析可知:参数激励对平带系统的转动有一定影响.当电机以一恒定速度转动时,系统呈现一倍周期运动,而当电机在基本转速和扰动转速固定的情况下,激励频率为15.8Hz时,系统呈现二倍周期运动,继续增加至系统19.4Hz时为混沌运动,当频率增加到26.2Hz时又为一倍周期运动.整个转动过程呈现交替的非线性关系.
3 结论
本实验主要测试了平带系统固定张紧装置后在匀速转动以及参数激励下转动的横向振动响应.通过对带在不同速度,不同参数激励的振动响应结果得出:传动带系统在转动的过程中存在周期、倍周期、混沌运动现象.
1 Abrate S.Vibration of belts and drives.Mechanism and Machine Theory,1992,27(6):645~659
2 陈立群,Zu J W.平带驱动系统振动分析研究进展.力学与实践,2001,23(4):8~12,18(Chen L Q,Zu J W.Vibration analysis research of flat belt drive system.Mechanics and Practice,2001,23(4):8~12,18(in Chinese))
3 Kraver T C,Fan G W,Shah JJ.Complex modal analysis of a flat belt pulley system with belt damping and coulombdamped tensioner.ASME Journal of Mechanical Design,1996,118(2):307~311
4 李滨城,Shrisch A等.机床带传动装置的横向振动及其影响因素.华东船舶工业学院学报(自然科学版),2004,18:66~70(Li B C,Shrisch AS,et al.Transverse vibration and influencing factors of machine belt transmission device.Journal of East China Shipbuilding Institute(Natural Science Edition),2004,18:66~70(in Chinese))
5 Tokoro H,Nakamura M,Sugiura N.Analysis of transverse vibration in engine timing belt.JSAE Review,1997:33~38
6 张红星,张伟,姚明辉等.粘弹性传动带非线性振动实验研究.动力学与控制学报,2007,5(4):361~364(Zhang H X,Zhang W,Yao M H,et al.Experimental research on nonlinear vibration of an axially moving viscoelastic belt.Journal of Dynamics and Control,2007,5(4):361~364(in Chinese))
7 时彧,刘义伦.稀土永磁体辅助金属带传动的非线性动力学研究[博士学位论文].长沙:中南大学,2010.(Shi Y,Liu Y L The nonlinear dynamics research of rare earth permanent-magnet auxiliary metal belt transmission[PhD Thesis].Changsha:Central South University,2010(in Chinese ))
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
汽车维护与修理(2020年23期)2020-06-06 13:33:34
汽车维护与修理(2020年15期)2020-02-04 01:51:26
汽车维护与修理(2019年21期)2019-12-03 09:55:50
数学物理学报(2019年4期)2019-10-10 02:38:56
能源(2016年2期)2016-12-01 05:10:31
贵州师范学院学报(2016年3期)2016-12-01 03:53:52