
GNSS信号捕获与跟踪算法的改进与实现
2014-02-28 06:17辛富国李荣芳
电信科学 2014年3期
辛富国,李荣芳
(陕西邮电职业技术学院 咸阳712000)
1 捕获与跟踪技术的研究意义
软件接收机的关键技术在于信号的捕获和跟踪。信号捕获重在估计两个重要参数[1,2]:一个是C/A码周期的开始,另一个是输入信号的载波频率。只有完成信号捕获过程,才进入锁定跟踪程序,而GNSS(全球卫星导航系统)接收机花在信号捕获上的时间是所有TTFF(首次定位时间)最冗长的一部分,提高信号捕获的速度对于缩短TTFF意义重大[3]。本文基于FFT循环相关捕获法提出了改进算法,改进后的算法缩短了捕获时间,并仿真验证了该算法的可行性。
捕获只是提供一个粗略的载波频率和码相位。在接收机工作过程中,要时刻对卫星信号保持跟踪,估计精确的码相位和多普勒频移、载波相位并解调导航电文,并计算出卫星与接收机之间的伪距。卫星和接收机之间相互运动,使得接收到的信号有多普勒频移,载波频率和伪码相位时刻在变化,如果没有对载波NCO和伪码NCO持续不断地进行动态调整,捕获的信号很快就会失锁,因此信号跟踪从其本质来说就是为了实现对信号的稳定跟踪而采取的一种对环路参数动态调整的策略[4~6]。
2 基于FFT算法的信号捕获
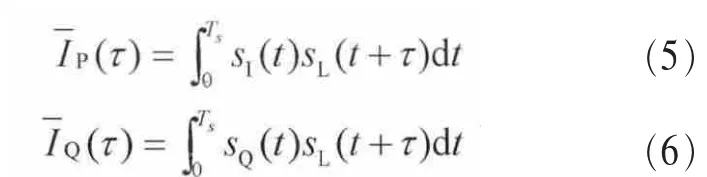
记sI(t)和sQ(t)分别为导航系统中中频信号和本地载波发生器输出的同相和正交信号相乘的结果,即:

将本地伪码发生器输出看作一个本地信号sL(t)=C(t),则I路和Q路积分器的输出量分别为:

其中,τ对应某一个伪码相位。此时,同相路和正交路的积分器输出的相关结果分别为:
x(t)和y(t)的卷积表达式为:

通过式(5)和式(7)的相似性,可以将同样的方法运用到GNSS信号捕获中相关结果的计算上[7~10]。得到互相关的频域表达式后,利用傅里叶逆变换得到其时域表达式,介绍如下。
对式(5)做傅立叶变换,得到:

其中,SL(f)和SI(f)分别是SL(f)和SI(f)的傅立叶变换,SI*(f)是SI(f)的复共轭。从式(8)可以得出,基于FFT算法的信号捕获原理如图1所示。

图1 基于FFT算法的信号捕获原理
实际的处理流程简述如下。输入信号与本地产生的载波信号相乘,如果载波频率与输入信号的载波频率一致,则输入信号的伪随机码信号得到恢复。将恢复后的伪随机码进行离散或快速傅里叶变换,得到其在频域的表示。同时将本地产生的伪随机码进行傅里叶变换并取其共轭,与输入信号的频域结果相乘,再对相乘的结果取逆傅里叶变换,该结果的模即时域的相关结果。如果在结果中出现一个峰值,则这个峰值的索引值对应输入信号的码相位。
3 基于FFT算法的改进
在循环相关捕获法中产生本地码Lsi(n),由于Lsi(n)是复数,频谱是不对称的,如图2(采样频率为16.367 6 MHz,采样点为1.636 7×104)。从图中可以明显看出,信息包含在前一半的谱线中,另一半谱线中的信息很少,因此只采用一半数据进行FFT变换,通过循环相关方法实现捕获的改进思路如图3所示。

图2 本地产生信号频谱

图3 基于FFT算法的改进思路
该方法只采用一半数据进行FFT变换,因此节省了捕获时间。
4 仿真验证改进后的算法
用1 ms采样数据在MATLAB环境下仿真实现卫星信号的捕获,仿真中的采样频率为16.367 6 MHz,中频(IF)为4.130 4 MHz。图4、图5显示的是改进后捕获算法的输出结果。图4显示,19号卫星可见,出现一个峰值,峰值位于码相位3770和频率4.136 94 MHz处;图5显示,17号卫星不可见,没有峰值输出,很难判断码相位和频率。

图4 19号卫星捕获结果

图5 17号卫星捕获结果
5 跟踪实现及仿真结果
载波跟踪环中用来剥离PRN码的本地码来自码跟踪环。同样,码跟踪环中用来剥离载波的两路本地载波信号来自载波跟踪环。相位鉴别器的I路和Q路输入来自码跟踪环的IP和QP相关值,这样可以减少计算工作量。组合的DLL和PLL跟踪环如图6所示。
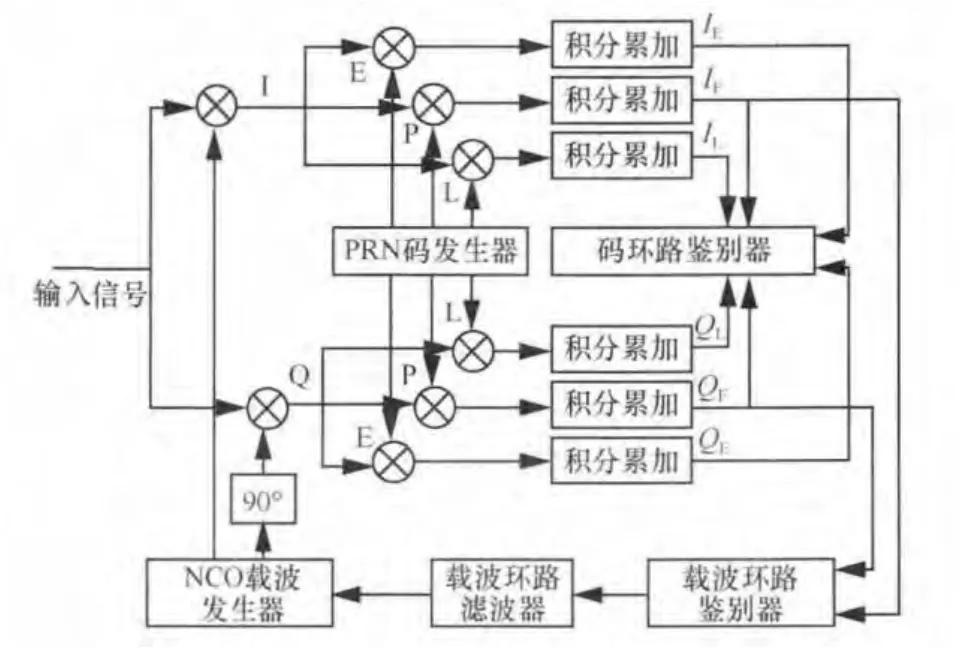
图6 组合的DLL和PLL跟踪环
图7 (a)中,跟踪的两路输出分别为I_P和O_P两支路信号,I_P支路输出为导航数据,跟踪到的数据为没有考虑频率牵引在稳定的跟踪过程中的数据,跟踪环进入稳定跟踪阶段后,I路输出明显的0和1 bit,而Q路输出的是噪声分量,进入稳定的跟踪阶段后,就可以读取I路输出以进行导航电文的解调。跟踪时间为1 s,可以看出导航数据跳变基本出现在20 ms的整数倍,因为电文数据速率为50 bit。
图7(b)是在稳定跟踪阶段输入信号与本地中间码、超前码和滞后码的相关积分结果。纵坐标为积分结果,横坐标为时间,单位是s。可以很明显地看出,中间码的输出结果最强,超前码和滞后码
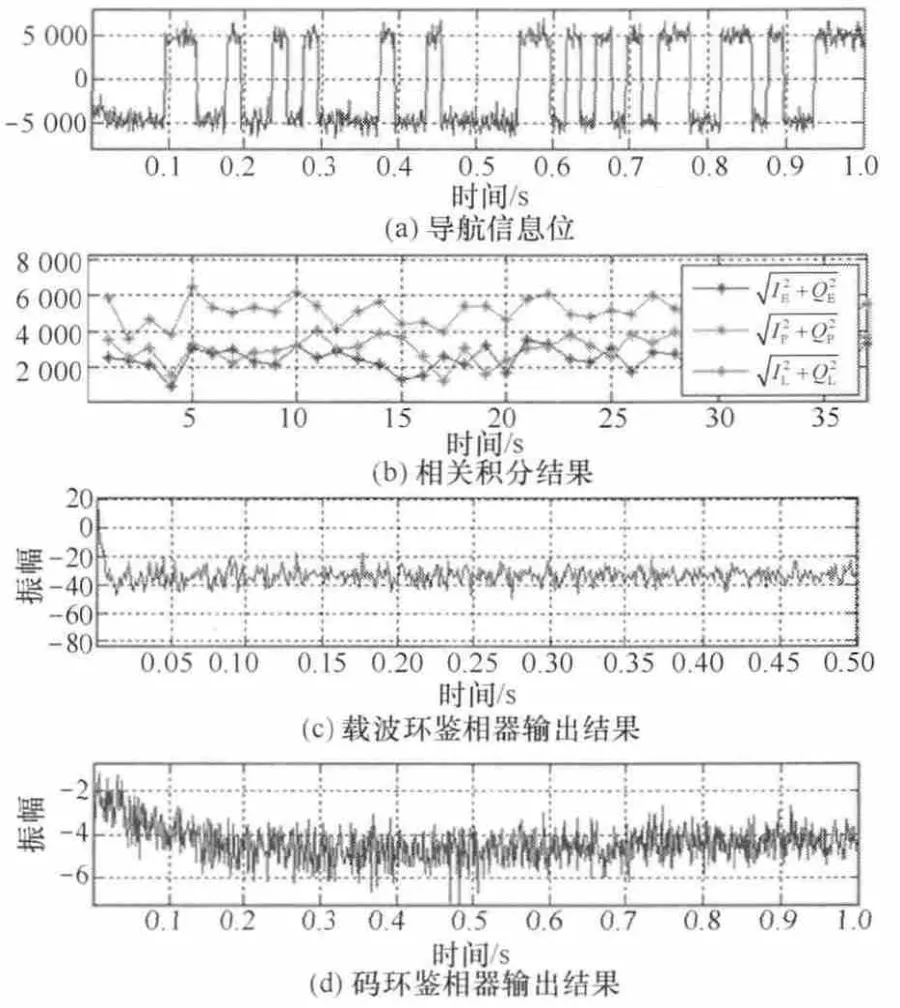
图7 19号卫星跟踪结果
图7(c)和图7(d)是载波环鉴相器和码环鉴相器输出结果。可以看出,载波环的响应时间大概是0.02 s,而码环的响应时间大概是0.15 s,说明跟踪的速度比较快。
6 结束语
根据对导航信号的频谱观察,改进了基于FFT捕获的算法,并对改进后的算法进行了仿真验证,结果表明该算法具有可行性,可以缩短捕获时间;设计了GNSS接收机完整跟踪通道,并采用MATLAB实现了对跟踪性能的仿真,结果表明所设计的跟踪通道达到设计要求。
1 曹冲.卫星导航接收机技术的发展趋势.数字通信世界,2005(5):55~56
2 Kaplan E D.GPS原理与应用.邱致和,王万义译.北京:电子工业出版社,2002
3 田薇,张超,姚长江.基于FFT算法的GPS信号快速捕获方法研究.弹箭与制导学报,2008,28(3):240~242
4 Rinder P,Bertelsen N.Design of a single frequency GPS software receiver.Aalborg University,2004
5 Akopian D.Fast FFT based GPS satellite acquisition methods.IEEE Proceedings Radar,Sonar and Navigation,2005,152(4):277~286
6 张雷,王建宇,戴宁.GPS信号捕获跟踪的仿真分析与研究.现代防御技术,2008,36(2):107~128
7 Li J H,Ba X H,Sheraz A,et al.An adaptive algorithm for fast acquisition of GPS signals.Chinese Journals of Electron Devices,2007,30(3)
8 Olivier J.Design of galileo L1F receiver tracking loops.Alberta Canada:University of Calgary,2005
9 Wang W J.High dynamic signal tracking algorithm based on software GNSS receiver.Journal of Harbin Institute of Technology,2008,40(1):226~230
猜你喜欢
河北大学学报(自然科学版)(2020年2期)2020-05-22
长春工程学院学报(自然科学版)(2019年1期)2019-05-22
数学物理学报(2019年2期)2019-05-10
测控技术(2018年7期)2018-12-09
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
浙江大学学报(工学版)(2016年11期)2016-06-05
舰船科学技术(2016年1期)2016-02-27
