
基于电动牵引交流传动控制系统研究
2014-02-27 01:17刘树华
船电技术 2014年8期
刘树华
基于电动牵引交流传动控制系统研究
刘树华
(海军驻武汉七一二所军事代表室,武汉 430064)
为了使电机在高速下仍然有足够的转矩输出,采用特殊的弱磁控制策略。介绍了全阶磁链观测器的原理推导与弱磁控制基本原理,并在360 kW电机控制上进行了验证,结果证明了算法的有效性。
感应电动机 弱磁 矢量控制
0 引言
在电动牵引领域通常采用矢量控制的感应电动机交流调速系统,感应电机的优点是转子结构坚固,电机的可靠性高、成本低。采用电压源逆变器作为驱动装置时,由于受到驱动器最大输出电压和电流的限制,需要采用弱磁等方法来实现高转速下的正常运行。低速时,一般采用定子励磁电流恒定而调节定子转矩电流分量大小的控制方法。这种方法在轻载时系统效率不高。在转矩控制的感应电动机驱动系统中,最大的输出转矩和输出功率依赖于逆变器的电流和电压限制。为了使电机在高速下仍然有足够的转矩输出,考虑到电压和电流的限制,应采用特殊的弱磁控制策略,以便在整个速度范围得到最大转矩。另外,当逆变器的功率能力大于电机的功率时,逆变器的输出功率应该得到限制以保证电动机的安全。
本文在基于全阶磁链观测的基础上实现了异步电机交流传动控制,当系统处于轻载或者加速工况时采用弱磁控制。弱磁控制算法有以下几个优点:1) 充分利用了逆变器的最大输出电压和电流的能力,实现了全速度范围内的最大转矩控制,包括低速和高速;2)算法基本上不依赖于电机的参数,也不依赖于转速,使用简单方便;3)各运行工况之间平滑切换,使电机在任何转速和转矩下都能稳定运行。另外本文还研究了低速下的最大转矩控制方法以满足系统满载低速启动的工况要求。
1 全阶磁链观测器原理
控制系统由控制台、两台变频器、两台电机、一台柴发机组构成,其控制结构框图如图1所示,其中PLC主要采集控制台的操作指令并下发到两个逆变控制器,并协调处理控制逻辑与开关状态。逆变控制器控制两台异步电机,采用功率控制模式以确保两边的出力一致和在起动阶段实现低速大转矩的输出,两台逆变器与制动单元采用共直流母线的结构。
异步电机矢量形式的动态数学模型基本描述公式:

图1 电动牵引交流传动控制系统框图




由式(1)可得:

由式(2)可得:

由式(3)可得:

由式(4)可得:

式(7)和式(8)相减得到:

将式(9)代入式(6)可得:
同理由式(3)和式(4)按照如上同样的转换可得到:


式(11)和式(12)相减得到:

将式(13)代入式(5)可得:

式(13)表示成矩阵形式为:

将式(10)和式(14)表示成矩阵形式为:

那么,同时观测定子磁链和定子电流的全阶磁链状态观测器,可以用下面公式描述:
其中,简化后的增益矩阵为:

设定观测器的极点配置为电机极点的k倍,则:

以上的增益矩阵具有普遍性,适合于任意型号的异步电机。
另有简化的增益矩阵为:
可取1=2=0.125
如果采用上述的最简化的增益矩阵,则全阶磁链观测器简化为:

2 弱磁控制原理

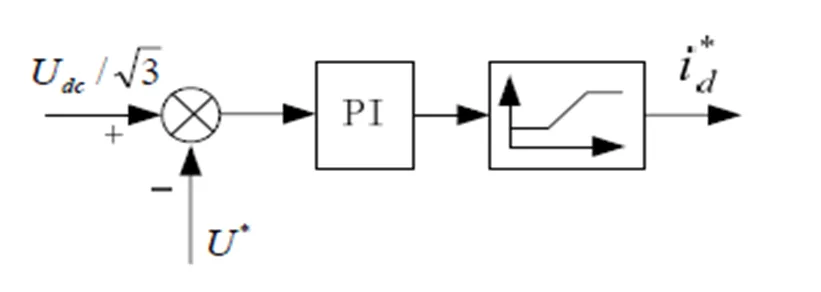
图2 传统的弱磁控制算法框图

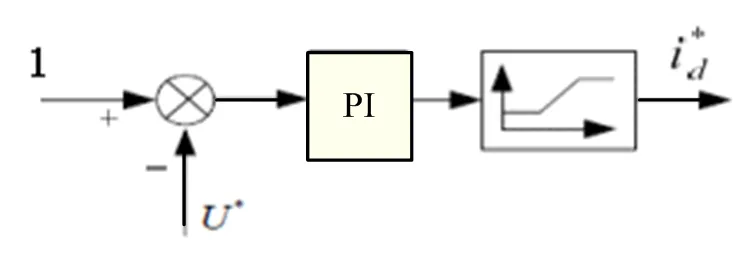
图3 弱磁控制算法框图
3 验证结果
根据以上的原理进行了一系列的试验,控制对象为360 kW异步电机,电机参数为:额定电压690 VAC,额定电流418 A,额定转速875 rpm。极对数为3。

图4 电流920 A堵转电流(1.82 Hz)
采用四阶runge_kutta算法进行全阶磁链观测器的离散化处理,其堵转工况的电流波形如图4所示,500 rpm时电流波形如图5所示,弱磁到3200 rpm时的电流波形如图6所示,3200 rpm(3.65倍弱磁)时励磁电流给定与控制波形如图7所示。
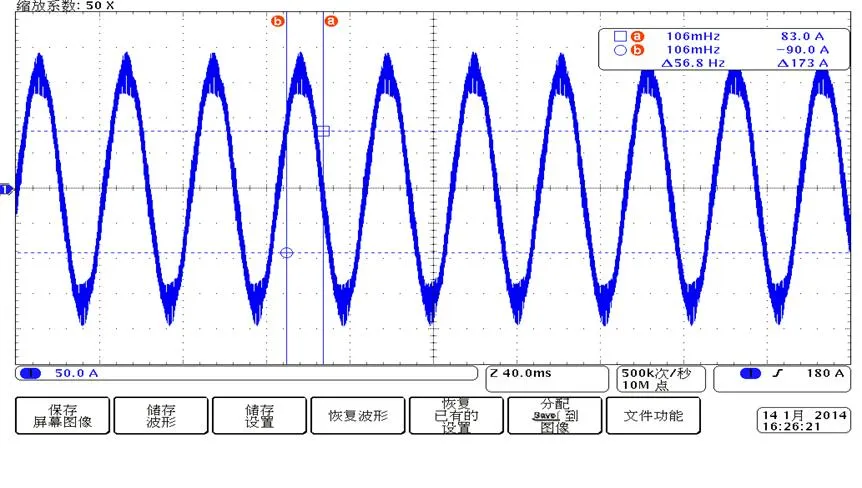
图5 500 rpm时A2相电流波形

图6 3200 rpm空载时A2相电流波形

图7 3200 rpm时励磁电流给定与反馈
4 结论
介绍了全阶磁链观测器的原理推导与弱磁控制基本原理,通过试验进行了验证,对控制系统进行了充分的验证,证明了算法的可行性与有效性。
[1] Xu Xingyi. Selecting the flux reference for induction machine drives in the field weakening region[J]. IEEE Transaction on Industry Applications, 1992, 28(6): 1353~1358.
[2] Kim S H, Sul S K. Maximum torque control of an induction machine in the field weakening region[J]. IEEE Transaction on Industry Applications, 1995, 31(4): 787~794.
[3] Feri Y, Tahakiro H, Mitsuhiro Saro. Iq Added Flux Weakening Strategy for the Rotor Flux Oriented Control of a Sinusoidal PWM VSI-fed Induction Motor. IECON01: The 27th Annual Conference of the IEEE Industrial Electronics Society.
[4] Kim S H, Sul S K. Voltage control strategy for maximum torque operation of an induction machine in the field-weakening region[J]. IEEE Transactions on Industrial Electronics, 1997,44(4): 512~518.
[5] Horst G and Josef W. Torque Capability and Control of a Saturated Induction Motor Over a Wide Range of Flux Weakening. IEEE Transactions on Industrial Electronics, 1995, 42(4): 374~381.
[6] 李磊. 异步电机无速度传感器直接转矩控制系统的研究与实践[D]. 南京: 南京航空航天大学, 2001.
[7] 李红. 数值分析. 武汉: 华中科技大学出版社, 2003.
Control System of Induction Motor for Electric Traction
Liu Shuhua
(Naval Representatives Office of 712 Research Institute, Wuhan430064, China)
TM346
A
1003-4862(2014)08-0065-04
2014-03-11
刘树华(1964-),男,高级工程师。研究方向:船舶电气工程。
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年19期)2015-04-09
新高考·高一物理(2014年4期)2014-09-17
电测与仪表(2014年11期)2014-04-04
