
光电稳定跟踪平台跟踪控制回路性能测试系统
2014-02-27 03:39李红光寿少俊胥青青
中国测试 2014年1期
李红光,姜 旭,石 波,寿少俊,韩 伟,胥青青
(西安应用光学研究所,陕西 西安 710065)
光电稳定跟踪平台跟踪控制回路性能测试系统
李红光,姜 旭,石 波,寿少俊,韩 伟,胥青青
(西安应用光学研究所,陕西 西安 710065)
针对光电稳定跟踪平台跟踪性能测试困难的问题,依据光电产品跟踪系统的特点,设计一套光电平台跟踪控制回路性能测试系统。该系统中将运动物体放置在平行光管或者凹面反射镜的焦面处,通过控制物体的运动规律模拟无穷远处运动目标,实现在实验室内对跟踪角速度、跟踪角加速度等指标的测试。实验表明该系统结构简单,测试准确、方便,测试效率高。
性能测试;自动跟踪伺服回路;光电稳定跟踪平台
0 引言
随着科技的发展,现代战争要求武器系统具有打击高机动目标的能力,作为武器子系统的光电系统需要瞄准跟踪这类目标。而人工控制光电系统瞄准高机动目标相对比较困难,尤其是空中目标,主要依靠自动跟踪捕获、跟踪和瞄准。因此,跟踪控制回路的性能必须进行各种指标的测试。目前,测试跟踪系统主要有两种方法[1-2]:(1)利用频谱仪测试控制回路带宽或者输入阶跃信号分析输出信号,这些方式都是从控制学的角度测试控制回路的性能;(2)在外场试验中跟踪远处实际的运动目标进行测试,但是该方法需要大量的人力、物力。因此,需设计一种实验室内测试跟踪角加速度、平稳跟踪速度等指标的测试系统。
本文设计一种实验室内测试跟踪控制回路性能指标的测试系统,该系统利用平行光管或者凹面镜模拟无穷远处,在平行光管后端或者凹面镜前面利用旋转或者移动的靶板模拟远处的运动目标[1,3],通过控制旋转或者运动靶板的运动特征,测试出光电稳定跟踪平台跟踪回路的跟踪角加速度、平稳跟踪速度等指标。本文首先分析跟踪控制回路的特点,然后分析测试系统的工作原理,最后根据实际要求进行跟踪控制回路性能测试系统设计。
1 光电稳定跟踪平台跟踪控制系统
光电稳定跟踪平台跟踪系统是一套复杂的控制系统,主要由视频自动跟踪处理器、跟踪回路控制器和稳定回路组成,稳定回路包括陀螺、稳定回路控制器、被控转台和电机等[4],结构框图如图1所示。稳定控制回路主要隔离载体扰动,保证视频图像清晰,是跟踪回路的基础。跟踪回路由视频跟踪处理器获得瞄准线与目标在两个方向上的像素差,跟踪回路控制器依据视场角度信息将像素差值转换为方位俯仰轴向的位置差,并且经跟踪控制算法处理后送给稳定回路驱动光电平台的瞄准线瞄准目标。
视频自动跟踪处理器每一场图像间隔20ms,视频图像的处理时间需在20ms内完成,即处理结果要延时20ms,因此视频自动跟踪处理器直接决定了跟踪回路的带宽[5]。

图1 光电稳定跟踪平台伺服回路简化模型
利用频谱分析仪可以测试出跟踪控制回路的带宽、相位裕量等控制学指标[6],但是实际应用中光电稳定跟踪平台系统能够跟踪具有怎样运动特性的目标并不明确,只有通过外场试验对实际运动目标进行跟踪测试才能获得,这样需要大量的资源支持。因此,系统跟踪角速度和跟踪角加速度等指标需要一套实验室测试系统。
2 平台跟踪控制回路性能测试系统原理
光电稳定跟踪平台主要的工作状态为利用小视场搜索、观察、瞄准、锁定、跟踪远距离目标,实验室内由于距离太近小视场无法成像,因此测试系统需要模拟远处的目标,并且要能控制目标的运动特性,原理框图如图2所示。最左侧为光电观瞄系统小视场光学镜头组件,中间凸透镜的焦距为f,A点为凸透镜的焦点,B点为凸透镜焦平面上的一点,依据凸透镜的光学原理,当目标位于A点时,经过凸透镜后转换为平行于凸透镜轴线的平行光,此时光电观瞄系统CCD小视场瞄准线要平行于凸透镜轴线才能瞄准凸透镜后面的A点目标。
当目标位于B点时,如图3所示,依据凸透镜的光学原理,经凸透镜转化为平行于BO的平行光,BO与凸透镜轴线的夹角为θ,此时光电观瞄系统要旋转θ角,使CCD小视场瞄准线平行于BO才能瞄准凸透镜后面的B点目标。

图2 光电平台跟踪回路测试系统原理框图一
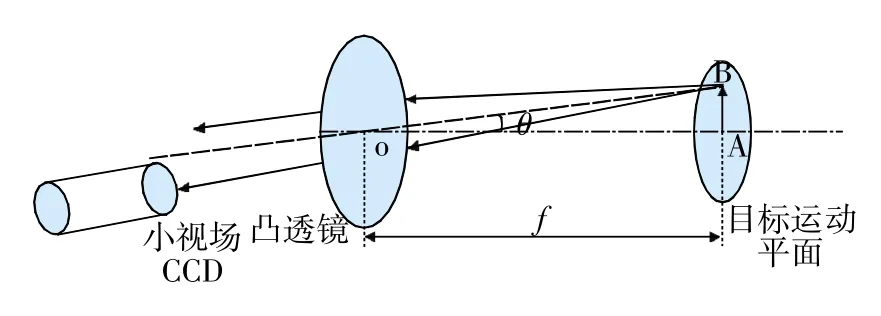
图3 光电平台跟踪回路测试系统原理框图二
假设A点和B点的距离为h,凸透镜焦距为f,则如果在A点放置一运动的目标靶,该目标靶以速度ν运动,则瞄准凸透镜后面的目标靶光电观瞄系统必须转动,且转动角度的正切值为当光电观瞄系统处于自动跟踪工作模式时,视频跟踪器锁定凸透镜后面的运动目标靶,当目标靶以速度νm运动时,此时光电观瞄系统跟踪目标时转动的角度[2]为当取时间t为单位时间时tgθs=光电观瞄系统的跟踪角速度为因此,只要控制目标靶运动速度νm的大小,就可以测试出光电观瞄系统的平稳跟踪角速度,包括最小平稳跟踪角速度和最大平稳跟踪角速度等指标。
假设目标点以凸透镜的焦点A为圆心,在凸透镜的焦平面内,做半径为R的圆周运动,运动周期为T,运动角速度如图4所示。
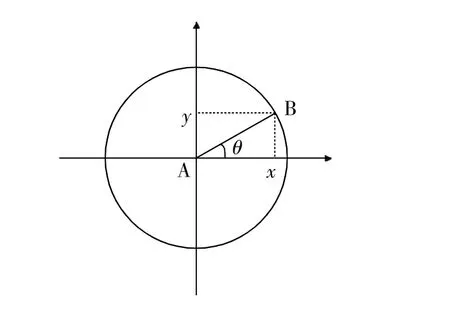
图4 目标点的运动轨迹示意图
此时,以A点为坐标系原点建立坐标系,则目标点B的坐标方程为

则B点在两个坐标轴上的运动速度方程为

因此,依据上面的结论,此时光电观瞄系统的跟踪角速度方程为

对式(3)等式的两侧求正切后再对时间t求导,得到光电观瞄系统的跟踪角加速度方程为
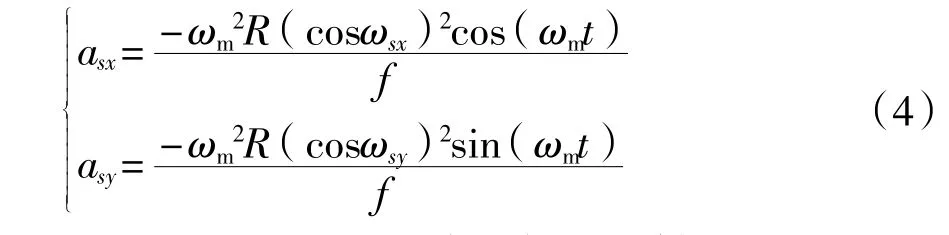
因此依据上述公式,当目标匀速做圆周运动时,运动周期T一定时,可以求出光电观瞄系统的最大跟踪角速度为

光电观瞄系统两个轴向的最大角加速度大小一致,只是达到最大值的时刻不同,这样就可以测试出光电观瞄系统的最大跟踪角加速度。
3 平台跟踪回路性能测试系统设计及实验
光电观瞄系统是多频谱的观察、瞄准、跟踪系统,传感器组包括可见光、激光等,普通的平行光管前端凸透镜一般无法通过所有频段的光,因此实际设计中选用大尺寸凹面镜代替平行光管,如图5所示。
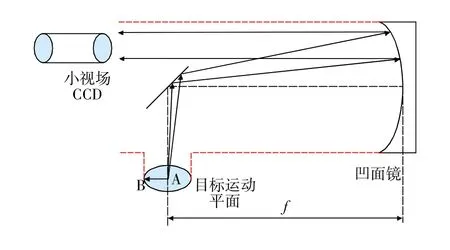
图5 光电平台跟踪回路测试系统示意图
图5中最右侧为凹面反射镜,在其轴线上焦点处放置一面小反射镜,其法线与凹面反射镜轴线的夹角为45°,目标靶面放置在另一侧与法线夹角为45°的位置,光电观瞄系统位于最左侧,且瞄准线平行于凹面镜的轴线。示意图中红色虚线表示整个设备的外壳,起到隔离杂光和支撑的作用,运动靶先通过平面反射镜进行反射,然后再经过凹面反射镜反射后转换为平行光进入光电成像系统后成像。
运动靶包括两种,一种是直线运动靶装置,测试光电观瞄系统的跟踪速度指标;另一种是圆形靶装置,测试光电观瞄系统的跟踪加速度指标。直线运动靶装置包括运动控制板和运动装置,如图6所示。运动装置的轨道一端安装带有减速齿轮组的高速电机,另一侧安装有传动轴承,运动轨道上安装有滚动轮,在该滚动轮中心轴上固定十字靶。电机旋转通过电机轴上的动力轮带动钢带运动,钢带通过传动轮后两端固定在十字靶的两端,在运动轨道的两端安装有换向开关,当十字靶运动到该位置时,换向开关把换向信号传给控制电路,改变高速电机的运动方向,控制电路改变高速电机两端的电压控制电机的转速,从而控制十字靶的速度。

图6 直线靶结构示意图
当进行系统测试时,将运动靶放置在测试系统靶位的中心位置。假设地面目标以时速70km/h移动,距离光电产品1km,如图7所示。此时的目标每秒种运动19.444 4 m,光电转塔转动角度为θ,由于该等腰三角形的一边远远小于另外两个边,因此即运动角的正切值近似等于运动距离与目标距离的比值。设此时的运动角速度为ω,则此时目标移动的角速度ω为1.114°/s,该速度为实际系统要求的最大跟踪角速度,最小跟踪角速度为0.02°/s,焦距为1.6m。依据公式当测试最大跟踪角速度时运动十字靶的运动速度为0.0311m/s,测试最小跟踪角速度时十字靶运动速度为0.5585mm/s。
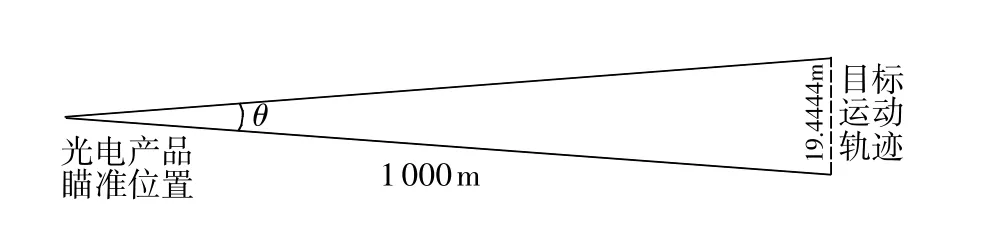
图7 光电产品跟踪角速度示意图
圆形靶装置主要由高速电机和运动盘组成,如图8所示,高速电机安装在支架上,运动盘中心安装
在高速电机的转动轴上,其半径小于测试系统中靶面开孔的半径,运动盘最外侧某位置放置一发光二极管、打码开关和纽扣电池,打码开关控制二极管是否工作,通过串联一定阻值的电阻控制二极管的亮度。
系统测试时将该装置放置在靶面中心位置,利用可调稳压电压控制高速电机的转速。系统要求的最大跟踪角加速度为30°/s2,依据式(5)计算此时运动盘的运动周期为4.6s。如果光电平台能够稳定的跟踪目标点,则说明系统满足最大跟踪角加速度为30°/s2的指标要求。
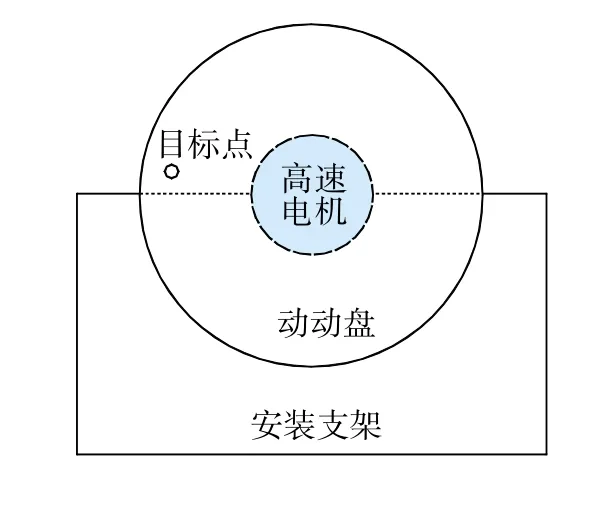
图8 圆形靶结构示意图
无论光电系统的跟踪角速度测试还是跟踪角加速度测试,都需要将测试时小视场CCD的视频记录下来,然后通过单帧视频播放分析跟踪目标和光轴十字之间的像素误差x[7-9],得到跟踪误差值的σ值。
4 结束语
本文设计的跟踪控制回路性能指标的测试系统利用凹面反射镜模拟无穷远处,在凹面反射镜焦平面位置放置平面反射镜,平面反射镜的另一侧利用旋转或者移动靶板模拟远处的运动目标,通过控制旋转或者运动靶板的运动特征完成测试。通过实际测试表明,该系统可以在实验室内完成对光电稳定跟踪平台跟踪回路的跟踪角加速度、平稳跟踪速度等指标的测试,测试精度高,测试过程简单,易于操作,提高了产品自动跟踪回路的调试和测试效率,避免了试验外场对光电观瞄系统跟踪回路性能进行测试工作,提高了工作效率。
[1]刘正云,苏建刚,等.瞄准线稳定精度的室内测试技术[J].光学精密工程,1999,7(5):95-99.
[2]耿延洛,王合龙,周洪武.机载光电探测跟踪系统总体精度分析方法研究[J].电光与控制,2004,11(2):18~20.
[3]朱华征,范大鹏,马东玺,等.动载体光电成像系统视轴稳定精度研究[J].应用光学,2009,30(4):537-541.
[4]纪明.多频谱光电综合系统高精度稳定技术研究[J].应用光学,1996(3):55-60.
[5]黄一,吕经芳,卢广山.机载光电跟瞄平台稳定与跟踪控制方法研究[J].飞规设计,2003(3):38-42.
[6]段志姣,王宇.机载光电系统稳定精度测试方法研究[J].光学与光电技术,2008,6(3):53-56.
[7]秦嘉,卢志刚,李勇,等.坦克火控系统稳定精度图像测试分析方法[J].火力与指挥控制,2009(10):175-179.
[8]刘正云.PSD用于稳像仪稳像精度测试方法探讨[J].应用光学,1995(1):50-52.
[9]张瓅,秦开宇.实时频谱分析仪中CCDF测量功能的实现[J].中国测试技术,2007,33(1):40-42.
Testing system for control loop tracked by photoelectric stabilization and tracking platform
LI Hong-guang,JIANG Xu,SHI Bo,SHOU Shao-jun,HAN Wei,XU Qing-qing
(Xi’an Institue of Applied Optics,Xi’an 710065,China)
Aiming at the problem that it is difficult to test the track performance of photoelectric stabilization and tracking platform,the authors designed a testing system to test the performance ofcontrolloop track ofphotoelectric stabilization and tracking platform according to the characteristic of photoelectricity tracking system.In this system,the moving object is placed on the focus of parallel light pipe or concave reflector,and be controlled by moving rule to simulate moving target infinitude far.The system can test performances such as tracking angle velocity and tracking angle acceleration.The experimentalresultsindicate thistesting system issimple,efficient,and convenient.
performance testing;servo loop of automatic track;photoelectric stabilization and tracking platform
O212.6;TP872;TP752.2;TP273
:A
:1674-5124(2014)01-0133-04
10.11857/j.issn.1674-5124.2014.01.033
2013-01-16;
:2013-03-19
李红光(1983-),男,山东巨野县人,博士研究生,主要从事光电观瞄系统和先进伺服控制等技术的研究。
猜你喜欢
新能源科技(2022年9期)2022-11-20
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
环境技术(2020年1期)2020-03-06
电子技术与软件工程(2019年5期)2019-06-20
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中国光学(2015年1期)2015-06-06
