
基于根轨迹法的水轮发电机组自动控制系统设计研究
2014-02-21 02:16黄春刘小兵王旭
西南民族大学学报(自然科学版) 2014年1期
黄春, 刘小兵, 王旭
(1. 西华大学能源与环境学院, 成都 610039; 2. 电子科技大学成都学院, 成都 611731)
基于根轨迹法的水轮发电机组自动控制系统设计研究
黄春1, 刘小兵1, 王旭2
(1. 西华大学能源与环境学院, 成都 610039; 2. 电子科技大学成都学院, 成都 611731)
提出了采用根轨迹法设计水轮发电机组自动控制系统, 并以某电站机组为例, 进行了水轮发电机组自动控制系统设计, 得出了机组能够稳定运行的参数范围, 研究表明根轨迹法设计能准确调整设计精度, 较传统的方法误差小.
根轨迹法; 水轮发电机组; 自动控制系统
1 引言
根轨迹法是经典控制理论中对系统进行分析和综合的基本方法之一, 它根据系统的开环零极点分布, 用作图的方法简便地确定闭环系统的特征根与系统参数的关系, 进而对系统的特性进行定性分析和定量计算, 由于它的形象直观、使用方便, 因此在工程实践中获得了广泛应用[1]. 但截至目前, 根轨迹法在水轮发电机组的自动控制系统设计中应用较少.
水轮发电机组的自动控制系统设计, 通常的方法是: (1)构建系统的Simulink数学模型; (2)对各个模块的传递函数(如检测反馈模块等)的各项系数, 进行设定; (3)展开仿真计算, 从示波器提取计算结果[2]. 这样做的好处是:能够直观地从仿真结果视图中, 判断系统的动态性能和稳定性, 读取系统的各项性能指标, 直观地判断系统设计好坏. 然而, 该方法也存在着一定的弊端, 若结果不满足条件, 就必须调整结构图中每个模块的传递函数增益值Kg, 而该参数的调整, 并无规律可循, 大多情况下, 只能够盲目地取值, 然后试算, 直到得到合理的设计结果为止(如图1所示). 由此可见, 采用传统的设计方法, 工作费时费力, 且系统的精度控制较差. 因此, 本文提出了采用根轨迹法来设计水轮发电机组的自动控制系统, 该方法能够有效地解决盲目调整增益值Kg的弊端, 直接在系统的复平面上显示稳定区域的参数取值范围, 再根据系统的精度控制要求, 便能准确定义参数.
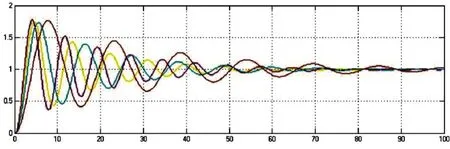
图1 自动控制系统传统设计方法
2 基于根轨迹法的设计原理
水轮发电机组自动控制系统的根轨迹设计方法[3], 本质上是对系统开环传递函数GK(S)求解, 找出所有的特征根. 再利用图解法把所有的特征根连接成光滑的曲线. 由该曲线的分布情况, 便能够判定系统稳定的范围, 从而达到选定增益值Kg的目的. 具体的操作步骤是:
(1)选定控制系统的开环传递函数GK(S). 在该步骤的操作中, 主要是根据电站的参数(如流量、功率、转速、转轮直径等), 确定合适的控制系统元件. 当元件型号选定(如差压变送器、伺服电机、液位信号器等), 开环传递函数GK(S)特征方程的各项系数, 便都已确定[4].
(2)根轨迹的绘制. 绘制系统根轨迹的操作, 包括计算轨迹曲线条数、绘制渐近线、判断轨迹区间、定义汇合点等. 由于自动控制系统的元件精密且复杂, 所以其完成的方式, 主要通过Matlab编写程序实现.
(3)控制系统根轨迹的结果分析. 当显示出轨迹曲线图之后, 便能够直接从图形中判断系统能够稳定运行的范围(取所有在复平面左边的根, 都能确保系统稳定)、动态过程是否存在振荡、调节时间长短、主导极点的坐标等. 再结合这些数据, 即可选择出合理的系统参数.
3 根轨迹法在水轮发电机组自动控制系统设计中的应用
本研究以一混流式水轮发电机组自动控制系统的部件--电磁式继电器为例, 其型号为DL-32, 结构为三阶闭环控制系统, 其开环传递函数为:
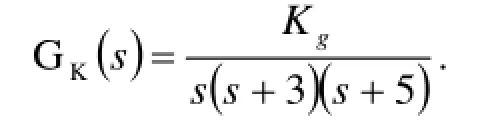
拟采用单位阶跃信号, 作为系统的典型输入信号, 只要该信号下系统能够稳定运行, 那么其余任何典型输入信号下, 系统性能都能够满足要求. 利用Matlab编制程序[5-7], 绘制其根轨迹, 绘制出的根轨迹如图2所示.
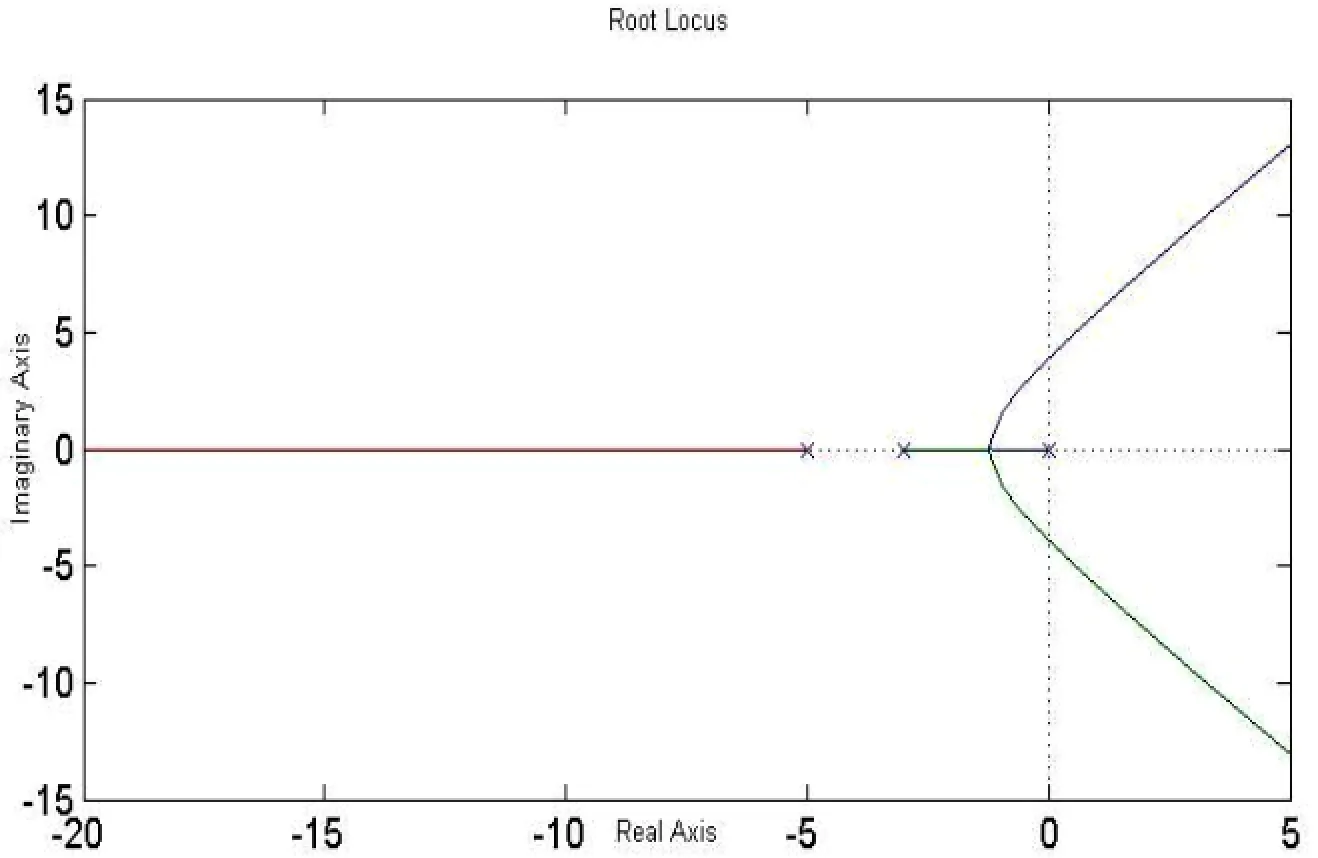
图2 自动控制系统根轨迹
(1)由图2可知, 该仿真模型的增益值Kg∈(0,∞). 当Kg∈(0,117.8)时, 开环传递函数的特征根, 全部处于复平面的左半部分, 故此时系统稳定. 而当Kg不属于这个范围的时候, 系统的特征根全部处于复平面的右边, 系统将不能稳定运行, 设计不合理.
(2)该系统的特点是只有极点, 不存在零点, 且闭环极点均为实数极点. 因此, 时间响应单调, 整个动态过程均无振荡, 处于单调下降的趋势. 且极点能够增大系统的阻尼, 所以峰值时间tp, 超调量σ等性能指标较好.
(3)复平面左边的主导极点靠近虚轴, 其他极点距离较远, 因此, 该极点对系统的性能影响极大, 其他极点对系统的性能影响可以忽略[8].
(4)根据水轮发电机组控制元件的确切设计要求(主要是电站对控制精度的要求), 选择合理的稳定裕量σ, 即在保证系统稳定的条件下,再提高其稳定的精度, 继而设计出性能良好的自动控制系统, 如图3所示.
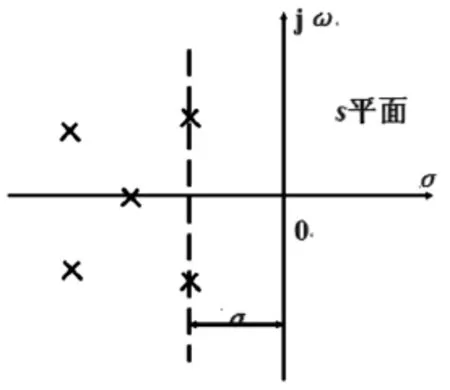
图3 系统稳定裕量
4 结论
本文采用根轨迹法对水轮发电机组自动控制系统进行了设计.研究表明该方法具有很强的可操作性并有下列特点:
(1)根轨迹法只要元件型号确定, 系统的开环传递函数系数便是定值. 因此, 可以绘制出其所有增益值的轨迹图. 再根据仿真结果,直接从图中读取系统稳定的取值范围, 少了取不同增益值的试算过程, 工作量大为减小.
(2)从结果的图示中, 可以判断出(通过有无零、极点)系统在动态过程的振荡幅度, 从而避免了计算验证的过程.
(3)还可以根据电站的具体要求, 准确调整设计精度, 较之传统的方法, 误差较小.
[1] 张琦. 根轨迹图绘制方法对比分析[J]. 机电技术, 2012(5): 22-23.
[2] 余成波, 张莲, 胡晓倩. 自动控制原理[M]. 北京: 清华大学出版社, 2009.
[3] 王泽南. 一种简易的根轨迹方程-根轨迹极坐标方程的建立[J]. 天津大学学报, 2002(1): 75-79.
[4] 余洋. 基于Simulink的电力系统稳定器(PSS)应用仿真[J]. 科技风, 2012(9): 62-63.
[5] 孙浩, 李艳. 基于Matlab/Simulink的电力系统故障仿真与分析[J]. 硅谷, 2012(22): 23-24.
[6] 董宇. 根轨迹分析的新方法[J]. 中国科技论文, 2012(10): 1-9.
[7] 中国机械工程学会,中国机械设计大典编委会. 机械设计手册[M]. 2版. 北京: 电子工业出版社,2007.
[8] 韦超毅, 谢美芝. 根轨迹法在汽车操纵稳定性研究中的应用[J]. 农业机械学报, 2007, 38(9): 19-22.
Research on the design of automatic control systems of hydroelectric generating sets by root locus method
HUANG Chun1, LIU Xiao-bing1, WANG Xu2
(1. School of Energy and Environment, Xihua University, Chengdu 61003, P.R.C.;
2. Chengdu College, University of Electronic Science and Technology of China, Chengdu 611731, P.R.C.)
The root locus method is used to design the automatic control system of the hydroelectric generating sets. The generating set in a hydropower plant is taken as the example, and the scope of parameters during the stable operation of the set is obtained. The research results show that the root locus method can accurately adjust the design accuracy and has smaller error than that of traditional system.
root locus method; hydroelectric generating set; automatic control system
TV734
A
1003-4271(2014)01-0124-03
10.3969/j.issn.1003-4271.2014.01.25
2013-10-18
黄春(1988-), 女, 四川内江人, 在读硕士研究生, 研究方向: 水电动力工程; 刘小兵(1965-), 教授, 博士, 主要从事水力发电工程研究.
研究受到四川省科技创新研究团队项目资助(项目号: 2011JTD16)
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
燃料化学学报(2022年5期)2022-05-30
防爆电机(2021年4期)2021-07-28
装备制造技术(2020年3期)2020-12-25
水泥工程(2020年4期)2020-12-18
制造技术与机床(2019年10期)2019-10-26
中国工程咨询(2016年9期)2016-02-13
海军航空大学学报(2015年1期)2015-11-11
