区域地基增强PPP-RTK 模糊度快速固定方法研究*
2014-02-13 05:43唐卫明刘经南
大地测量与地球动力学 2014年1期
邹 璇 唐卫明 施 闯 刘经南
(武汉大学卫星导航定位技术研究中心,武汉 430079)
1 引言
精密单点定位方法基于单台GNSS 接收机的非差观测值,无需高密度参考网的实时观测数据即可实现广域甚至全球范围内的精密定位[1,2]。然而,基于实数解的PPP 要达到mm ~cm级的定位精度通常需要数小时以上观测时间。因此,如何减少模糊度收敛时间,有效获取非差模糊度固定解已成为PPP 方法亟需突破的关键性难题[3,4]。
为了加快PPP 模糊度收敛速度,区域地基增强PPP-RTK 方法应运而生。该方法本质上是一种非差/星间单差模式的网络RTK,利用该方法可以有效实现PPP 与网络RTK 数据处理模式的统一和无缝衔接,并且由于区域地基增强PPP-RTK 的增强信息可以由每个参考站独立播发,因此能够有效解决常规网络RTK 方法可同时服务用户数量受限的问题。国内外已有多位学者对区域地基增强的PPPRTK 方法进行了研究,并取得了一系列研究成果[5-10]。现有各种方法一般基于CORS 网提出,这些实现方法虽各具特点,但本质上都是将参考站间双差模糊度通过添加适当的基准转换为非差模糊度的形式,从而利用参考站处消除模糊度影响的载波相位非差观测值残差对每颗可视卫星方向分别建模,用户则在PPP 数据处理模式下通过固定星间单差模糊度实现快速精密定位。本文分析了单参考站生成PPP-RTK 区域地基增强信息相比双差模式建模的独特优势,在现有方法的基础上提出了一套区域地基增强PPP-RTK 模糊度快速固定方法,并利用实测数据验证了该方法的可行性。
2 区域地基增强信息生成方法
2.1 单参考站建模相比双差模式建模的优势分析
区域地基增强PPP-RTK 方法在最初提出时是将参考站间双差模糊度通过添加具有整数特性的模糊度基准映射为非差模糊度的形式[5,6]。由于参考站间双差模糊度解算需要采用同步观测数据,并且整个地基增强网的双差模糊度在解算后需设定相一致的模糊度基准,才能使映射得到的各参考站与可视卫星间非差模糊度仍保留原有双差模糊度间约束关系。因此,双差模式统一构建区域地基增强信息难以满足大规模乃至全国范围的实时应用需要。此外,双差模式下建模还存在地基增强信息有效性难以判定的问题。如图1 所示,假定测区A、B 对应各条基线的双差模糊度均能有效解算,按照区域地基增强PPP-RTK 方法,参考站a、b 和参考站c、d 处生成的非差地基增强信息分别可用于测区A 和测区B内用户进行模糊度快速固定[5]。此时,如基线ad和基线bc 对应双差模糊度无法有效固定,则参考站a、b、c、d 处生成的地基增强信息在测区C是无效的。如果不对地基增强信息的有效性加以区分,将会影响用户的模糊度固定效率,甚至引起模糊度固定错误并最终导致定位结果发生偏差。因此,如按照双差模式建模,每个参考站在生成地基增强信息时必须将该信息对应的有效测区范围发送给用户,这无疑将极大增加整个系统实时运行时的数据播发量。
与双差模式建模相比,广域PPP-RTK 方法对参考站个数要求相对较少,在卫星UHD 实时建模时无需采用参考站间严格同步的观测数据,卫星UHD 在一定时间内的变化也较为稳定[4]。因此,可利用实时估计的卫星UHD 计算每个参考站同一基准下的非差模糊度。按照这一研究思路,整个区域地基增强系统可根据观测状况灵活增减和选择参与建模的参考站,并且由于单站数据处理时对软件、硬件和网络数据传输的要求相对较低,误差改正信息可在各参考站微机上独立或分子网计算,因此地基增强参考站的个数和地区分布将不再受到制约。此外,即使某一参考站的非差模糊度解算错误,也不会影响其余参考站所生成增强信息的有效性。
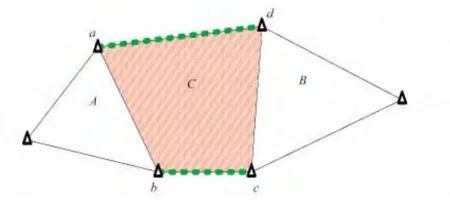
图1 地基增强信息有效性判定示意图Fig.1 Validity determination of ground-based augmentation information
2.2 附加伪距精化的区域地基增强信息单参考站生成方法[5 -10]
由于参考站坐标精确已知,可反算得到卫星轨道、卫星钟差、大气延迟等造成的CA/P1 伪距误差改正信息,即此时参考站处消除坐标影响的伪距非差观测值残差为:

与载波相位误差建模类似,按照

对用户周边至少3 个地基增强站的CA/P1 伪距非差观测值残差进行平面拟合建模,并利用内插得到的伪距误差信息精化用户的CA/P1 伪距观测值。其中x、y、z 为平面拟合系数。参考站处所生成伪距增强信息的噪声与P1伪距噪声相一致,而测站卫星方向的对流层、电离层等区域大气延迟误差可以通过平面拟合建模的方式有效消除,其残余误差部分与伪距观测噪声相比可忽略不计,因此认为用户处内插所得伪距误差改正信息omcP的噪声只受的噪声以及平面拟合系数影响。由于用户位于参考网内,拟合系数x、y、z 均大于0。假定P1的噪声为εP,根据误差传播定律,omcP的最大观测噪声为εP,最小观测噪声为0.58εP。


其中f1和f2为载波相位观测值L1、L2的频率。
假定P2的观测噪声与P1的相等均为εP,由误差传播定律有PC伪距的观测噪声为:

因此,即使不考虑模型改正后的载波相位观测值与原始PC伪距中所包含对流层延迟的不一致性,P2伪距较P1伪距相对更大的观测噪声,以及某些与卫星相关的伪距系统性误差影响,采用精化后的伪距,其最大观测噪声不到原始PC伪距观测噪声的一半。
3 区域地基增强PPP-RTK 用户模糊度快速固定方法
利用模型精化后更为精确的CA/P1 伪距观测值可得到一个较为可信的模糊度初始解,此时如能进一步优化模糊度搜索空间,将有效改善现有方法的模糊度搜索效率和可靠性,进而实现用户模糊度快速解算。按照区域地基增强PPP-RTK 方法的实现原理,用户利用增强信息可以有效消除观测信号在测站卫星方向所受的电离层延迟、对流层延迟、卫星轨道误差、卫星钟差、卫星硬件延迟等影响[5],此时用户处载波相位星间单差观测方程为:
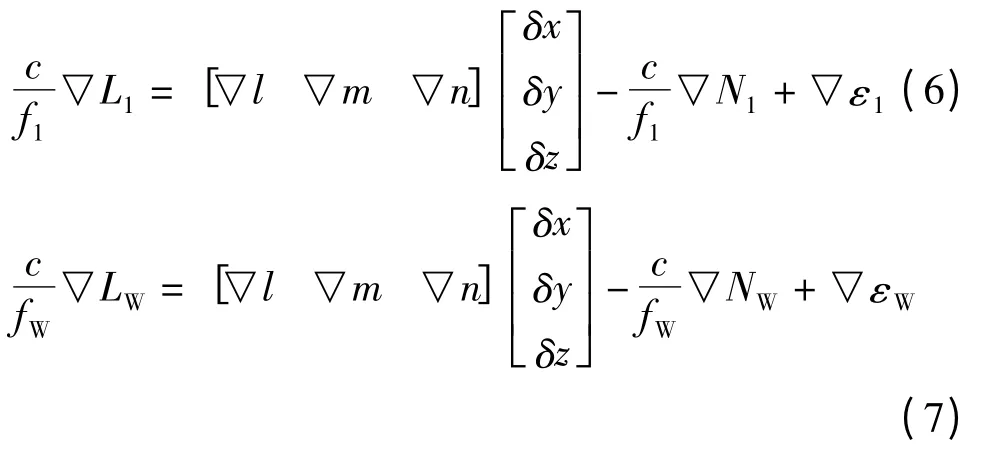
其中:c 为光速,f1和fW分别为模型改正后载波相位观测值L1、宽巷(LW)的频率,l、m、n 为线性化系数,δx、δy、δz 为用户近似坐标在三个方向的误差分量,N1、NW为2 个频率上的载波相位模糊度,ε 为观测误差,▽为星间单差标识符。
由公式(6)、(7)相减得:

故有:

当不考虑观测误差ε 的影响时,可得到用户处L1、LW星间单差模糊度间的线性约束关系:

因此,当▽NW有效确定后,由公式(10)得到的L1模糊度初值与L1的模糊度固定解▽N1间存在以下关系:

利用该方法计算得到模糊度▽NW、▽N1,便可根据获得无电离层组合观测值(LC)对应模糊度的固定解(▽NC)[8],并得到相应的模糊度固定解定位结果。
4 实例分析
4.1 数据准备
选取江苏省CORS 网2011年324天采样间隔为1 秒的一组实测双频数据,对本文提出的区域地基增强PPP-RTK 模糊度快速固定方法进行验证分析,整个测试网的位置分布如图2 所示。为确定检测站的真实坐标作为对比分析时的基准,首先利用PANDA 处理软件[11],将全部43 个测站全天的观测数据按照静态网解模式进行联合解算,得到测站间精确的相对位置关系。
图2 中三角为选取的地基增强参考站,圆点为模拟的动态检测站。由于在收集该组数据时并未同时保存对应的实时精密卫星轨道和精密卫星钟差产品,本文虽采用IGS 事后精密卫星轨道和精密卫星钟差,但这并不影响本文方法在实时应用中的有效性。

图2 测试网位置分布示意图Fig.2 Distribution of testing network
4.2 检测站数据解算
算例采用递推最小二乘法进行逐历元解算,估计每个历元的测站坐标、接收机钟差、模型精化后残余的天顶对流层延迟,因此至少需要5 颗有效观测卫星的数据才能进行解算。在模糊度解算时,通过LAMBDA 算法搜索星间单差LW和L1模糊度[12],并辅以RATIO 检验和公式(11)判断模糊度固定结果的有效性。以上数据处理方法同样可扩展至多频数据处理。
步骤1:利用模型精化后的CA/P1 伪距观测值和LW相位观测值组成星间单差联合观测方程,快速固定LW模糊度。在LW模糊度不能全部固定时,通过对备选模糊度的有效性进行排序,使用部分模糊度固定技术以及模糊度分步固定、迭代解算的处理方式,固定尽可能多的模糊度参数;
步骤2:利用模型精化后LC观测值和LW观测值组成星间单差联合观测方程,利用固定的LW模糊度和LC模糊度浮点解,根据公式(12)得到L1模糊度的浮点解,采用与LW模糊度解算类似的方式进行L1模糊度固定。并进一步利用公式(11)对L1模糊度固定结果进行可靠性检验;
步骤3:利用LW模糊度和L1模糊度固定解按照公式(12)得到LC模糊度固定解,最终实现区域地基增强PPP-RTK 用户模糊度的实时快速解算。
4.3 区域地基增强信息精度分析
检测站处地基增强信息的模型改正值与其真实大气延迟的一致性是评判非差模式下误差建模可行性,以及设定公式(11)中阈值e 最为直接的手段。为避免接收机钟差的影响,采用星间单差观测值进行验证分析。
以检测站CK 处共视时间最长的PRN10 与PRN17 卫星对为例,图3 给出了模型精化后星间单差L1、L2观测值残余误差在该时段内的变化以及对应时刻的卫星高度角。从图3 可知,PRN10 与PRN17 的星间单差L1、L2观测值残余误差变化较为平稳,其数值均在-0.09 ~0.09 m 内,因此本文算例设定公式(11)中阈值e 为0.5 周。L2观测值的星间单差标准差为0.036 m,比L1观测值略大,这主要是因为L2观测值的观测噪声相对较大所致。

图3 精化后PRN10 与PRN17 的星间单差L1、L2 观测值残余误差Fig.3 Observation residuals of L1 and L2 between satellites PRN10 and PRN17 after refining
4.4 伪距单点定位精度分析
以检测站CK 为例,给出采用原始PC伪距观测值,以及采用模型精化后的CA/P1 伪距观测值进行单点定位时的定位精度。如图4 所示,采用原始PC伪距观测值进行单点定位时每个历元的误差均在10 m 以内,在X、Y、Z 三个方向的定位精度(RMS)分别为1.22、1.58 和1.42 m。当对CA/P1 伪距观测值进行精化后,检测站CK 的单点定位精度得到了显著提升,每个历元的定位误差均优于2 m,在X、Y、Z 三个方向的RMS 分别为0.30、0.35 和0.33 m。其余26 个检测站均能得到与CK 站相一致的伪距单点定位结果,由于篇幅所限,在此不逐一复述。
4.5 区域地基增强PPP-RTK 模糊度快速固定有效性及定位精度测试
采用用户端模糊度快速固定方法分别对两种区域地基增强模式进行验证,以满足RATIO 检验阈值为3.0、公式(11)中阈值e 为0.5 作为模糊度固定成功与否的判定依据。如表1,本文算例总计进行了1 944 027 组测试。如采用原始的PC伪距,分别有637 635、616 936 组测试可单历元固定检测站的LW和LC/L1模糊度,相应的模糊度单历元固定成功率仅为32.80%和31.73%;如采用模型精化后的CA/P1 伪距进行测试,则LW、LC/L1模糊度可单历元有效固定的时段提升为1576957 和1429627组,相应的模糊度单历元固定成功率高达81.12%和73.54%,与采用原始PC伪距进行区域地基增强PPP-RTK 时LW、模糊度单历元固定的成功率相比分别得到了约147.31%和131.73%的改善。
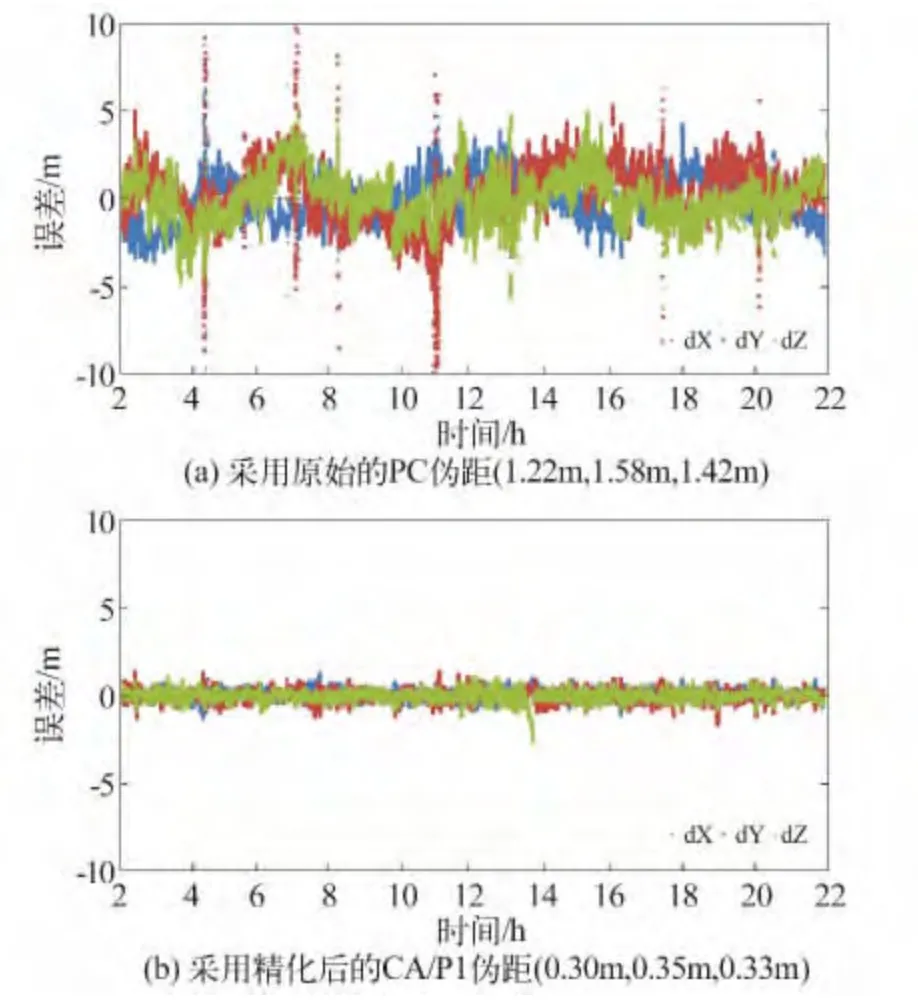
图4 分别采用原始的PC 伪距和精化后的CA/P1 伪距对检测站CK 进行单点定位Fig.4 Single point positioning with original PC and refined CA/P1
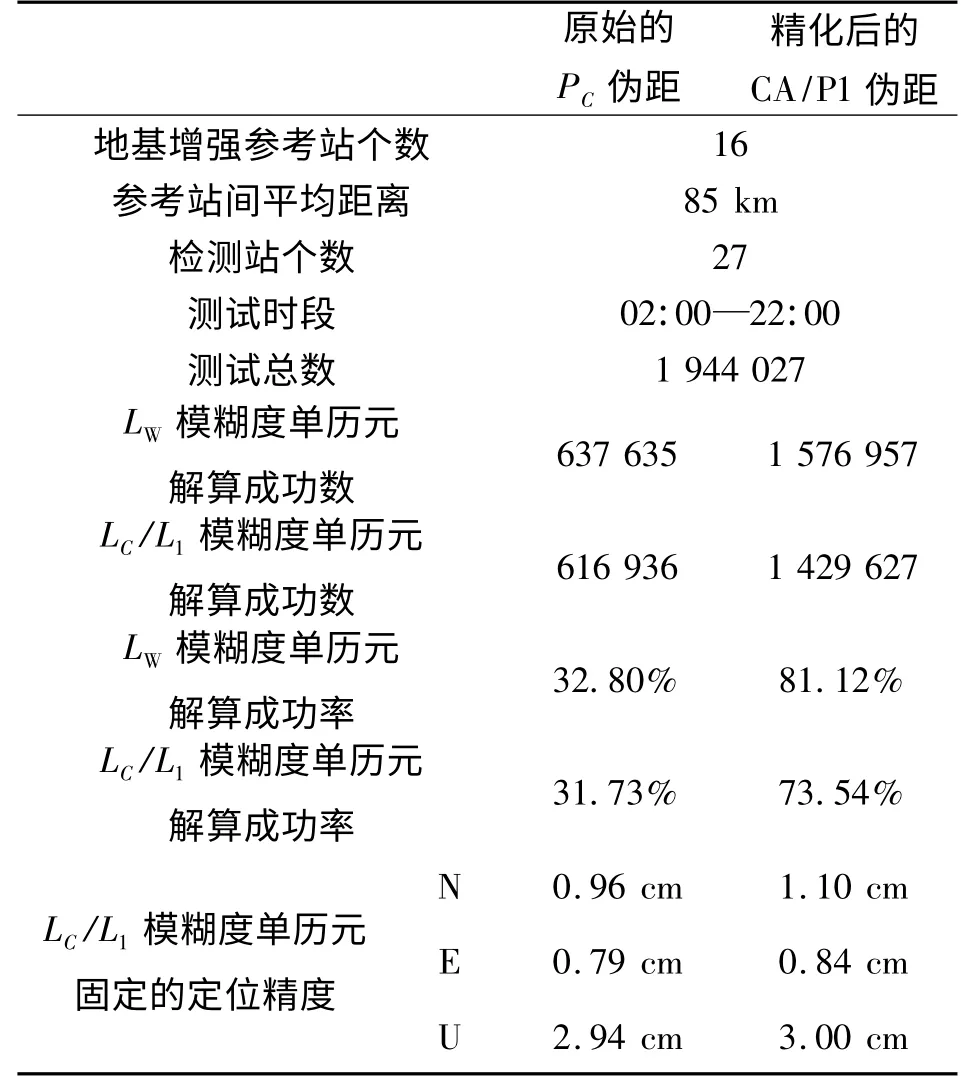
表1 区域地基增强PPP-RTK 模糊度单历元固定测试结果Tab.1 Results of single-epoch ambiguity resolution tests for PPP-RTK using the ground-based augmentation information
在LC/L1模糊度可单历元固定的测试时段中,进一步分析两种处理模式下的定位精度。当采用原始的PC伪距时,LC/L1模糊度单历元固定后用户定位精度在N、E、U 方向分别为0.96 cm、0.79 cm 和2.94 cm。当采用模型精化后的CA/P1 伪距时,区域地基增强PPP-RTK 用户LC/L1模糊度单历元固定后的定位精度在N、E、U 方向分别为1.10 cm、0.84 cm 和3.00 cm,与采用原始PC伪距时的定位精度基本一致。
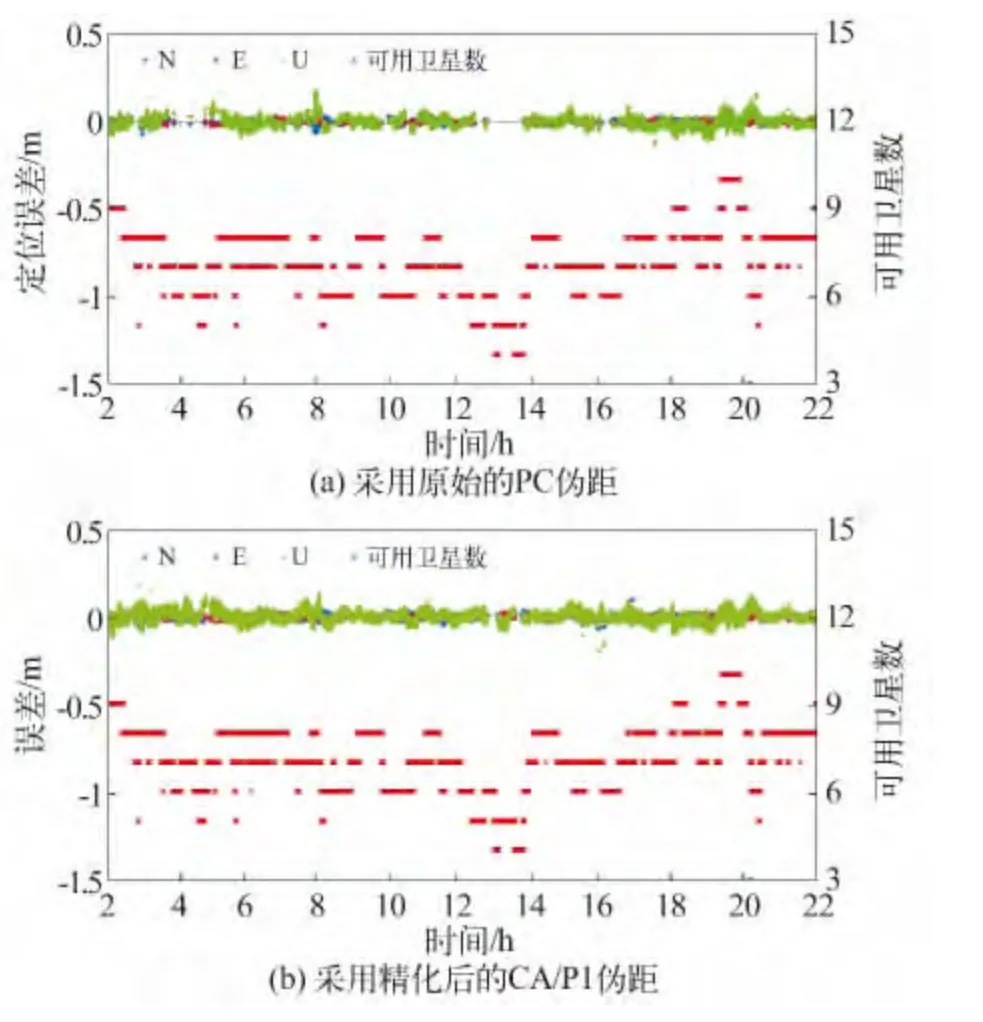
图5 检测站CK 在模糊度单历元固定时的定位误差变化图Fig.5 Positioning errors of single-epoch resolution with fixed ambiguities at checking station CK
为了进一步展示本文对原有区域地基增强信息生成方法的改进,以及本文所提出区域地基增强PPP-RTK 用户模糊度快速固定方法的有效性,对每个历元的观测数据分别进行模糊度固定,图5 给出了检测站CK 分别采用新旧两种区域地基增强信息生成方法时的LC/L1模糊度单历元固定结果。
对比图5 可以发现,当采用原始的PC伪距观测值进行测试时,LC/L1模糊度可单历元固定的时段较为稀疏,并且在03:30—04:30(当地时间11:30am—01:30 pm)以及12:10—13:20 存在连续的、模糊度无法单历元固定的时段。这主要是由于电离层处于全天较为活跃的时期,以及可用卫星数相对较少所引起的。与其相比,采用模型精化后的CA/P1 伪距时用户LC/L1模糊度单历元固定结果具有更好的连续性和有效性,并不存在长时间无法单历元固定LC/L1模糊度的时段。
5 结论
本文给出了一套区域地基增强PPP-RTK 用户模糊度快速固定方法,并设计了相应实验方案验证该方法的可行性和有效性。在不能固定用户全部的模糊度时,本文采用部分模糊度固定技术以及模糊度分步固定、迭代解算的处理方式,固定尽可能多的模糊度,取得了令人满意的结果。
与采用双差模式建模相比,基于广域PPP-RTK方法在每个参考站分别生成区域地基增强信息的模式更加适合大规模地基增强网的实时应用,整个区域地基增强系统可根据观测状况灵活增减和选择参与建模的参考站。此外,单参考站建模方式还能有效解决双差模式建模时地基增强信息有效性难以判定的问题。
因此,按照本文给出的方法,区域地基增强PPP-RTK 用户仅利用几个历元数据即可实现厘米级定位,这改变了现有方法在精密单点定位时需要较长观测时间的局限性。
1 Bisnath S and Gao Y.Current state of precise point positioning and future prospects and limitations[R].International Association of Geodesy Symposia 133,2007,Springer,Berlin.
2 张小红,等.基于服务系统的实时精密单点定位技术及应用研究[J].地球物理学报,2010,53(6):1 308-1 314(Zhang X H,et al.Server-based real-time precise point positioning and its application[J].Chinese J Geophys.,2010,53(6):1 308-1 314)
3 Ge M R,et al.Resolution of GPS carrier-phase ambiguities in Precise Point Positioning(PPP)with daily observations[J].Journal of Geodesy,2008,82(7):389-399.
4 Geng J H,et al.Ambiguity resolution in precise point positioning with hourly data[J].GPS Solutions,2009,13:263-270.
5 Ge M R,et al.An alternative network RTK approach based on undifferenced observation corrections[R].Proceeding of ION GNSS.Porland,Oregon ION,2010.
6 Teunissen P J G,Odijk D and Zhang B.PPP-RTK:Results of CORS network-based PPP with integer ambiguity resolution[J].Journal of Aeronautics,Astronautics and Aviation,Series A,2010,42(4):223-230.
7 Zhang B,Teunissen P J G and Odijk D.A novel un-differenced PPP-RTK concept[J].Journal of Navigation,2011,64(S1),doi:10.1017/S0373463311000361.
8 Zou Xuan,et al.URTK:Undifferenced network RTK positioning[J].GPS Solutions,2012,doi:10.1007/s10291-012-0277-5.
9 Li X X,Zhang X H and Ge M R.Regional reference network augmented precise point positioning for instantaneous ambiguity resolution[J].Journal of Geodesy,2011,85(3):151-158.
10 姜卫平,邹璇,唐卫明.基于CORS 网络的单频GPS 实时精密单点定位新方法[J].地球物理学报,2012,55(5):1 549-1 556.(Jiang W P,Zou X and Tang W M.A new kind of real-time PPP method for GPS single-frequency receiver using CORS network[J].Chinese J Geophys.,2012,55(5):1 549-1 556)
11 Liu J N and Ge M R.PANDA software and its preliminary result of positioning and orbit determination[J].Wuhan University Journal of Natural Sciences,2003,8(2):603-609.
12 Teunissen P J G.The least-squares ambiguity decorrelation adjustment:a method for fast GPS integer ambiguity estimation[J].Journal of Geodesy,1995,70(1-2):65-82.
猜你喜欢
国际太空(2021年11期)2022-01-19
数理化解题研究·综合版(2021年11期)2021-12-22
导航定位学报(2021年5期)2021-10-13
小学教学研究(2021年5期)2021-09-29
导航定位与授时(2021年3期)2021-05-18
导航定位学报(2021年2期)2021-04-22
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
全球定位系统(2020年4期)2020-09-18
初中生世界·九年级(2020年2期)2020-04-10
中国化妆品(2017年12期)2017-06-27