化妆品自动装盒机取盒-开盒机构的设计与仿真
2014-02-11 05:57:44余杰先李克天
机电工程技术 2014年8期
余杰先,李克天,向 飞
(广东工业大学机电工程学院,广东广州 510006)
化妆品自动装盒机取盒-开盒机构的设计与仿真
余杰先,李克天,向 飞
(广东工业大学机电工程学院,广东广州 510006)
通过对化妆品装盒机取盒-开盒机构的分析,研究了实现内摆线运动轨迹的行星轮式取盒-开盒机构。确定了两旋转中心距离和吸头半径等关键参数对取盒效率的影响,建立了数学模型,分析了机构运动的速度和加速度,利用Matlab软件对机构中的吸头的运动轨迹、位移、速度、加速度进行仿真并绘制出相应的曲线,为机构的优化提供理论依据。最终设计出能够实现高取盒效率的取盒机构。该机构有易于制造、运行平稳、结构紧凑等特点。
自动装盒机;取盒机构;行星轮;摆线;仿真
0 引言
自动装盒机属于包装机械的一种,在制药行业、食品加工行业、化妆品行业的包装中应用非常广泛。自动装盒机一般包括取盒-开盒机构、物品输送机构、说明书折叠机构、纸盒输送机构、推料机构、封盒机构等。而取盒-开盒机构起着至关重要的作用,其性能的好坏直接影响自动装盒机的整机质量[1-2]。
随着化妆品行业的蓬勃发展,市场对化妆品自动装盒机的要求越来越高,集中体现在对装盒速度的要求不断提高。而传统化妆品自动装盒机中的凸轮-摆杆式取盒-开盒机构不利于装盒速度的提高,故要大幅提高化妆品自动装盒机的装盒速度,改进取盒-开盒机构势在必行[3-4]。
本文提出一种连续式的取盒-开盒机构,通过建立数学模型,并进行该机构的运动学分析,确定关键参数,并通过Matlab软件对该机构的运动方程进行仿真绘制出吸头的位移、速度、加速度曲线。
1 机构的动作和轨迹分析
1.1 取盒-开盒动作分析
如图1所示,采用三个吸头同时连续工作能明显提高取盒-开盒的效率,三个吸头在空间上圆周均布列,相临两个吸头之间的角度为120°。通过对吸头上吸盘进行通气和断气即可实现对纸盒的吸取和释放。吸头从供盒架处吸取纸盒,并做圆周运动,转过120°后,通过碰撞斜块的圆弧面,使纸盒的棱边因为受到一定的挤压作用而处于半打开状态,继续做120°圆周运动后到达输送带的卡槽上,这时由于纸盒还有一个水平的速度分量,在卡槽里半打开的纸盒将会完全打开,并由输送带卡槽保持完全打开的状态,以便接下来推料机构把化妆品和说明书推进纸盒内。这样就完成了一个取盒-开盒动作流程。

图1 取盒—开盒动作简图
1.2 轨迹分析
由上述的取盒-开盒动作分析可见,在一个取盒-开盒流程中,要重点考虑的地方是呈120°圆周分布的三个工作点,亦即是吸盘在供盒架吸取纸盒的地方、运动过程中纸盒碰撞斜块圆弧面的地方、还有就是在卡槽吸盘释放纸盒的地方。在吸盒的地方吸取纸盒后要迅速沿着原路退出来,以免碰到供盒架的支架。在和斜块圆弧面碰撞的地方也要求只能一瞬间碰撞,以免对纸盒造成伤害。在卡槽释放纸盒的时候也要求吸盘释放纸盒后迅速向上运动,以免吸盘碰到运动着的卡槽。显然,在这个工作点,都有一个“下降→上升→下降”的趋势。故把轨迹设计为如图2所示的内摆线形状[5]。

图2 内摆线形状
2 机构的原理以及设计
机械制造中一般采用行星轮系来实现内摆线的运动轨迹,本文也采用这种原理来实现吸头的内摆线运动轨迹,图3是机构的原理图。
吸头连杆4连接在从动齿轮5上,而从动齿轮5、定齿轮2、转向齿轮3组成了行星轮系,故当转盘1转动的时候既能带动从动齿轮5公转,又能通过转向齿轮3使从动齿轮5自转,只要控制齿轮间的传动比合适,就能使吸头形成内摆线轨迹[6]。
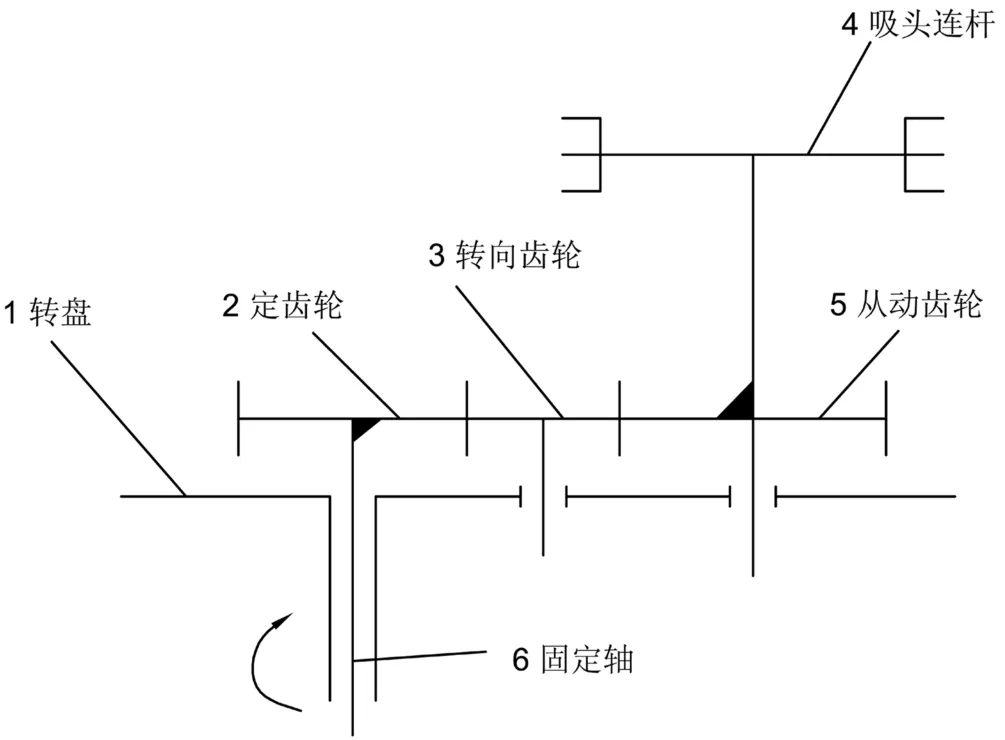
图3 机构的原理简图
3 数学模型的建立
运动模型如图4所示。以转盘的圆心为坐标原点建立坐标xoy系作为基本坐标系。以从动齿轮的圆心作为原点建立坐标系x'o'y',为了方便起见,以吸盘在吸盒位置作为起始位置,令圆心o'在xoy坐标系的30°上,即θ0=30°,oo'=r,r为从动齿轮圆心到转盘1圆心的距离,r1为吸头到从动齿轮5的距离。由轨迹要求知道当转盘1转动了(θ·θ0)角度时,从动齿轮5实际转动了3(θ·θ0)。把吸头的位移分解到基坐标系xoy下求解得[7]:
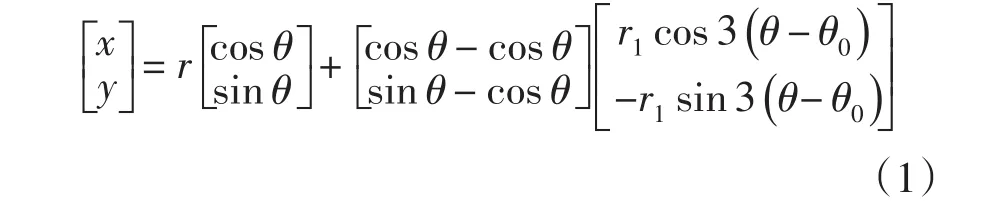
化简(1)式得:

令θ0=30°时,吸头的运动方程为:
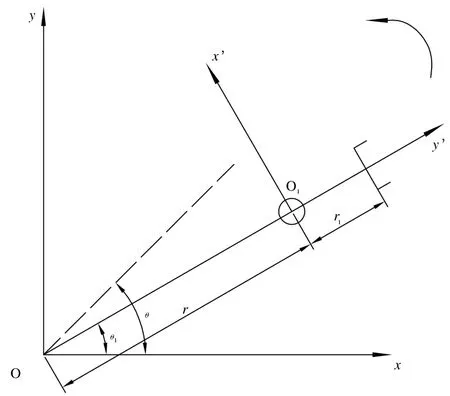
图4 运动模型图

利用Matlab软件对上述运动方程进行仿真得出图5和图6的吸头轨迹图,验证了以上运动方程的正确性。

图5 吸头运动轨迹图
4 机构运动学分析及仿真
对运动方程组(2)进行一次求导可以得到吸头的速度大小为v= x’2+y’2,将方程用Matlab进行仿真得到图7吸头的速度曲线图[8-9]。
代入方程并化简得:

当θ=30°、θ=120°、θ=240°时,cos3θ等于1,此时加速度a达到最大值。这三个角度恰好是吸头在运动轨迹中的三个工作点。把方程用Matlab进行仿真得到图8吸头加速度曲线图。
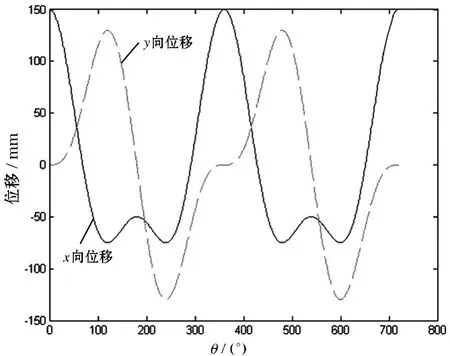
图6 吸头xy方向位移曲线图
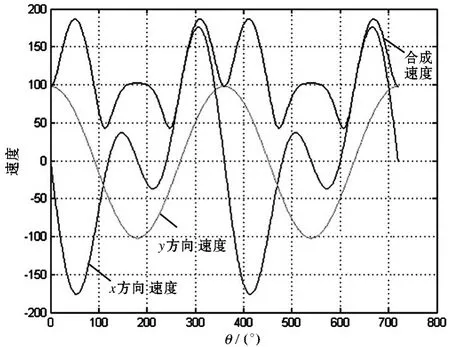
图7 吸头速度曲线图

图8 吸头加速度曲线图
5 结束语
由上述图表可知吸头的运动轨迹是准确的,而且位移、速度、加速度曲线都是连续平滑的,故不会产生冲击。而且运动方程是关于θ的函数,通过改变r、r1两个参数就能产生符合生产需求的内摆线轨迹形状。该机构具有结构紧凑、零部件容易加工、体积小、性能稳定、成本低等特点。所以该机构的取盒-开盒机构在化妆品自动装盒机市场将会有很大的应用和发展前景。
[1]黄丽文.国产药品装盒机的现状及发展研究[J].包装与食品机械,2006,24(3):36-38.
[2]陈靖菲,钱炜,熊磊.间歇式药品自动装盒机[J].包装与食品机械,2009,27(6):5-7.
[3]高军,吕金丽.装盒机构的设计[J].机械传动,2002,26(3):71.
[4]陈闽,曹巨江.自动装盒机打开机构运动方案设计与分析[J].机械传动,2010,34(3):76-77.
[5]吴旭,任子文.具有速度和姿态要求轨迹的凸轮连杆机构设计[J].机械设计与研究,2008,24(2):117-120.
[6]李龙,田晓鸿,曹巨江.高速取盒机构运动轨迹设计与研究[J].包装与食品机械,2011,29(3):28-30.
[7]李龙,曹巨江,田晓鸿.行星轮式取盒机构的研究与分析[J].机械传动,2011,12(3):60-62.
[8]欧长劲,洪尉尉,彭宽栋.细丝拉丝机张力控制系统设计与仿真 [J].机电工程,2012(10):1191-1194.
[9]苗国军,陈军.装盒机说明书抓取装置的运动学分析[J].包装与食品机械,2004,22(4):10-13.
(编辑:王智圣)

图3 收线排线系统流程图
考虑到整个控制系统的功能要求、信号输入输出个数、控制稳定性、指令系统、以及响应速度等因素,选用三菱的FX2N-32MT的PLC,收线和排线电机均采用台达伺服电机EC⁃MA-C20401ES, 配 套 的 伺 服 放 大 器 为ASD-B20121-B,额定速度可大3 000 r/min,输出扭矩0.32 N·m,功率0.1 kW。触摸屏选用威纶通MT506MV,TFT型LCD显示器:5.6",256色,分辨率:320×234,多圈绝对值编码器采用海德HEDSS光电旋转编码器。
5 结束语
根据微细扁线材的收卷过程,本文提出了一种基于交流伺服电机的收线排线控制方法,排线系统采用联动式排线系统,以PLC为上位机控制整个系统的收线排线过程,用绝对值编码器代替接近开关,通过人机界面可以方便的设置排线移动区间和线材宽度,PLC接受收线电机发送的脉冲信号,经内部运算控制排线电机转速,从而使收线和排线过程满足一定关系,经实践,该系统在收卷截面形状为扁平的微细扁线材时,运行可靠,速度控制精度高,排线均匀平整,系统稳定,并能自动适应不同长度的收卷辊。
参考文献:
[1]周伟春,郭钟宁,何建文.微细扁线材生产工艺及其装备开发[J].机电工程技术,2008,37(12):46-49,94.
[2]刘全军,何建文,郭钟宁.微细扁线材恒张力绕卷系统[J].机电工程技术,2013,42(09):98-102.
[3]中达电通.ASDA-B2系列伺服驱动器应用技术手册[Z].2012.
[4]三菱电机株式会社.FX1S,FX1N,FX2N,FX2NC系列编程手册[Z].2010.
第一作者简介:贾 锐,男,1988年生,河北唐山人,硕士研究生。研究领域:先进制造技术,超精密加工技术。
(编辑:阮 毅)
Design and Simulation of Boxing Taking Mechanism in a Automatic Cartoner for Comestics
YU Jie-xian,LI Ke-tian,XIANG Fei
(College of Mechanical&Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
This paper analyzed the motion and trajectory of a boxing taking mechanism in a automatic cartoner,designed a new type of high-efficiency boxing taking mechanism,worked out how the key parameters influence on the efficiency of boxing taking mechanism,provided theoretical principle for optimal design by its kinematic analysis.In fact,the designed mechanism has some advantages such as easy to manufacture,work steadily,tight in structure etc.
automatic packing machine;box-taking mechanism;gear planet;cycloid;simulation
TH122
A
1009-9492(2014)08-0090-04
10.3969/j.issn.1009-9492.2014.08.027
余杰先,男,1988年生,广西玉林人,硕士研究生。研究领域:机构优化设计。
2014-02-27
猜你喜欢
现代制造技术与装备(2023年8期)2023-11-02 06:16:26
汽车实用技术(2021年23期)2022-01-05 11:21:42
防爆电机(2021年1期)2021-03-29 03:02:50
计算机测量与控制(2017年6期)2017-07-01 16:23:59
制造技术与机床(2017年3期)2017-06-23 08:11:51
消费电子(2015年7期)2015-12-11 15:58:02
机电信息(2014年26期)2014-02-27 15:53:39
机电信息(2014年23期)2014-02-27 15:53:30
机电信息(2014年20期)2014-02-27 15:53:23
机电信息(2014年5期)2014-02-27 15:51:48