
永磁同步电机空间矢量控制建模与仿真
2014-02-10 17:45左伟玲
科技创新与应用 2014年5期
左伟玲
摘 要:本设计通过了解和掌握永磁同步电机结构、特点和国内外学者对其最新研究成果,研究永磁同步电机控制理论中经常涉及到的矢量坐标系变换原理,在此基础上给出两种不同坐标系变换的数学模型,并在Matlab/Simulink建立坐标系变换仿真模型并进行仿真研究,然后对逆变器进行数学分析并掌握空间电压矢量脉宽调制的基本原理,设计永磁同步电机空间电压矢量脉宽调制控制系统,最后在Matlab/Simulink环境下进行建模与仿真,并给出仿真结果以及对仿真结果进行分析,仿真结果表明理论分析的正确性。
关键词:永磁同步电机;空间矢量控制;数学模型
永磁同步电动机的定子绕组与一般交流电动机的定子绕组相同, 转子采用永久磁铁, 因此转子磁链(磁通)是恒定的, 电动机方程(电压方程、磁链方程和转矩方程)相对于异步电动机来说都较为简单, 在控制过程中, 磁链的观测模型也不需要进行计算。永磁同步电动机按定子绕组感应电势波形的情况来分类时, 一般可分为:正弦波永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)和梯形波永磁同步电机(Brushless DC Motor, BLDC)。介于前者在现实中应用更为广泛, 本论文主要应用的也是正弦波永磁同步电机。永磁同步电动机具有很多优点, 这些优点也在实际应用中得到了很好的发挥, 例如:根据它谐波少、转矩精度高的特点, 常用于伺服系统和高性能的调试系统;永磁同步电机有转轴上无滑环和电刷的特点, 这也解决了其它电机因电刷而带来的使用寿命问题。与此同时, 永磁同步电动机还具有体积小、功率密度高、转子转动惯量低、运行效率高、调速范围宽等诸多优点。值得注意的是, PMSM是一种强耦合、非线性时变的多变量系统, 这也为其控制工作带来了一定难度, 而加强对其基本构造和工作原理的理解能有助于克服这一问题。
空间矢量控制技术优点众多, 近几年发展非常迅速, 尤其在永磁同步电机中的使用, 更是再次凸显了它的好处。本论文通过对空间矢量控制技术和永磁同步电机的学习及分析, 在熟练掌握相关数学模型的建立和Matlab/Simulink的使用后, 将建立两种不同坐标系变换的数学模型和基于SVPWM控制技术的永磁同步电动机系统模型, 并在Matlab/Simulink环境中进行仿真。最终与理论分析相比较, 验证仿真结果的正确性。
1 控制系统结构模型
根据对永磁同步电机SVPWM控制系统的理解及前期研究, 可得到永磁同步电机空间矢量脉宽调制控制系统设计框图如图1所示。
图1 永磁同步电机SVPWM控制系统设计框图
本控制系统采用的是双闭环控制, 即速度环和电流环, 由图1可看到, 其主要构成为:
三个PI控制器(PIController)、两相旋转(dq)和两相静止坐标系(?琢?茁)坐标变换的变换器(dq/?琢?茁Coordinate Converter)、三相静止(abc)和两相旋转坐标系变换的变换器(abc/dq Coordinate Converter)、逆变器(Inverter)、空间电压矢量调制器(Space Vector Pulse Width Modulation,SVPWM)。
系统运行过程:给电机输入一模拟三相定子电流ia、ib、ic,当传感器检测到这一电流时, 该三相电流通过abc/dq坐标变换器被变换为实际定子的直轴电id和交轴电iq。
参考定子交轴电流i*q通过比对实际转速和参考转速, 再经PI控制器处理后获得。将参考定子直轴电流i*d设为0, 把上述id、i*d、iq、i*q四个变量比较过后交由PI控制器处理, 从而分别产生定子直轴、交轴电压Vd和Vq。将得到的电压量通过dq/?琢?茁坐标转换器处理后输入空间电压矢量调制器, 从而产生一系列触发脉冲, 以控制逆变器, 驱动其产生三相电压, 最终驱动永磁同步电机。
2 控制系统仿真分析
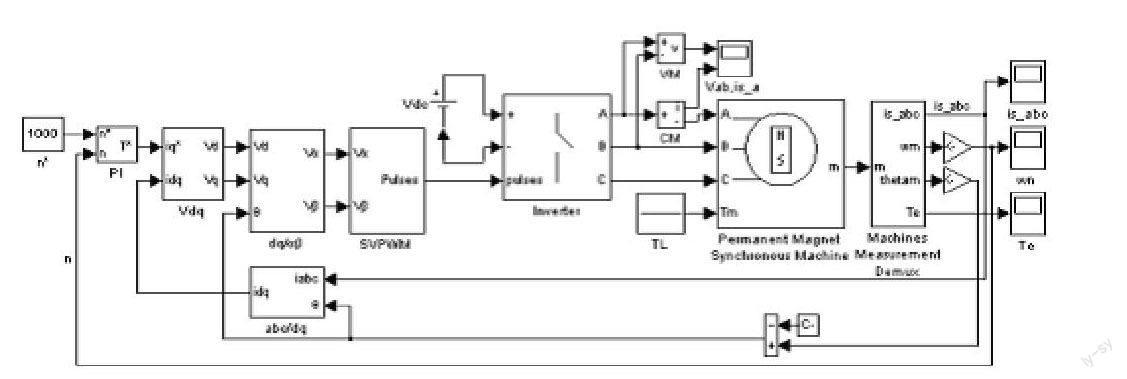
永磁同步电机空间矢量脉宽调制控制系统仿真模型如图2所示, 模型仿真环境为Matlab/Simlink。
图2 基于SVPWM的PMSM控制系统仿真建模框图
如图所示, 系统主要仿真模块为:
坐标转换模块、速度控制器模块、电流控制器模块、矢量控制模块、空间电压矢量控制模块、电压逆变器模块、永磁同步电机模块。
系统部分参数为:总仿真时间为0.3S;系统零时段负载起动转矩TL=5N·m。
(1)速度环闭环时, 系统定子三相相电流、转速、转矩、矢量切换时间、矢量所处扇区响应情况。
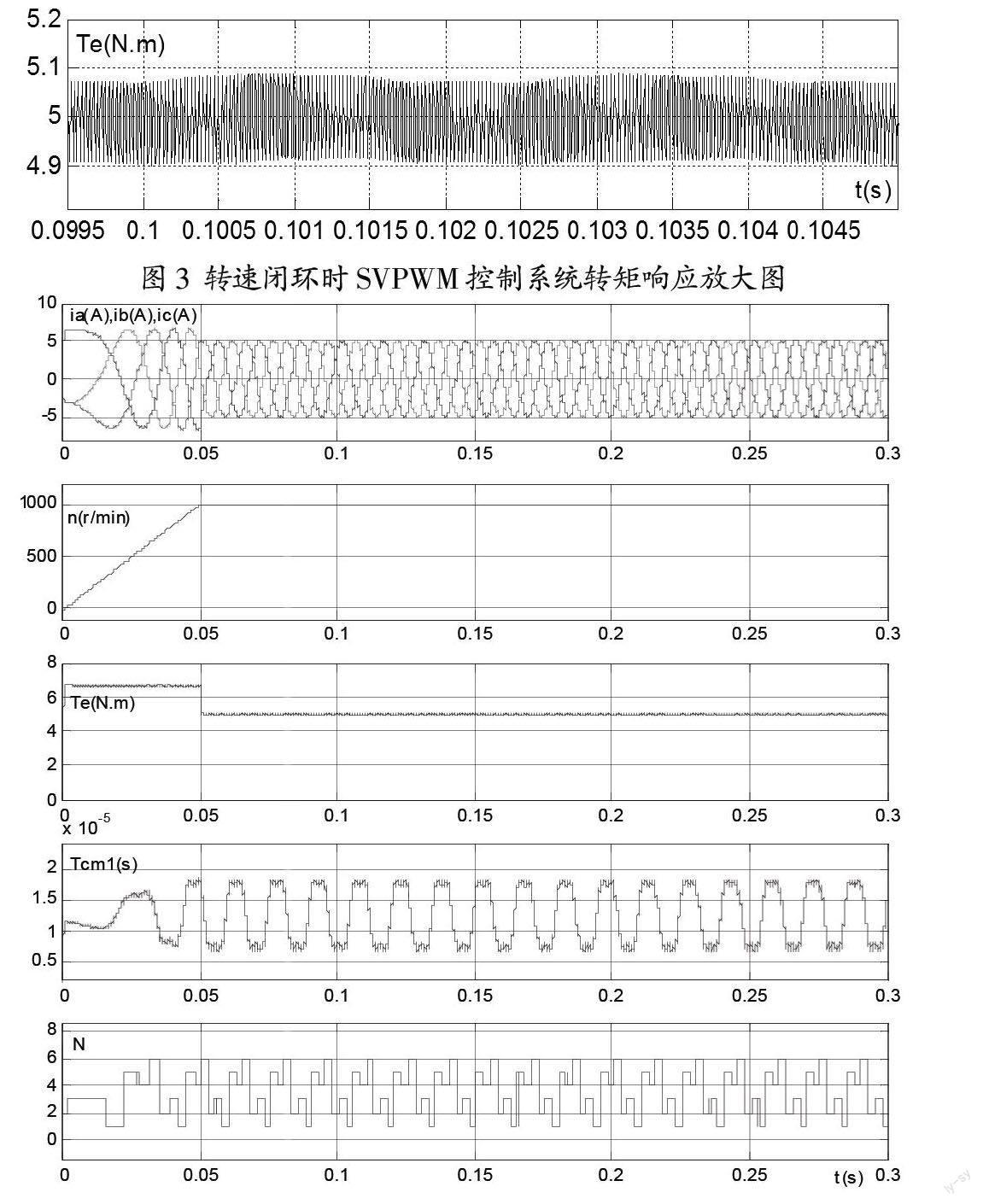
图3 转速闭环时SVPWM控制系统转矩响应放大图
图4 转速闭环时电机三相定子电流、转速、转矩、矢量切换时间
和矢量所处扇区响应图
由图4仿真波形, 可以得到结论如下:
a. 系统在0s~0.05s之间转速响应以斜率20000上升,延迟时间Td=0.025s、上升时间Tr=0.046s、调节时间Ts=0.05s, 无超调量, 系统动态响应快。系统起动时, 带动负载速度快, 转速在0.05s内稳定在设定值n=1000r/min。
b. 系统在稳态运行时,0.05s后都进入稳态阶段, 系统稳态输出误差已趋近零, 反应出该模拟系统控制精度较高, 稳态特性良好, 波形与理论分析结果相符, 静态性能稳定。
c.系统起动时,定子起动转矩6.7N·m,系统稳定运行后,定子转矩稳定在设定值5N·m。转矩脉动控制在0.2N·m内,系统运行稳定。
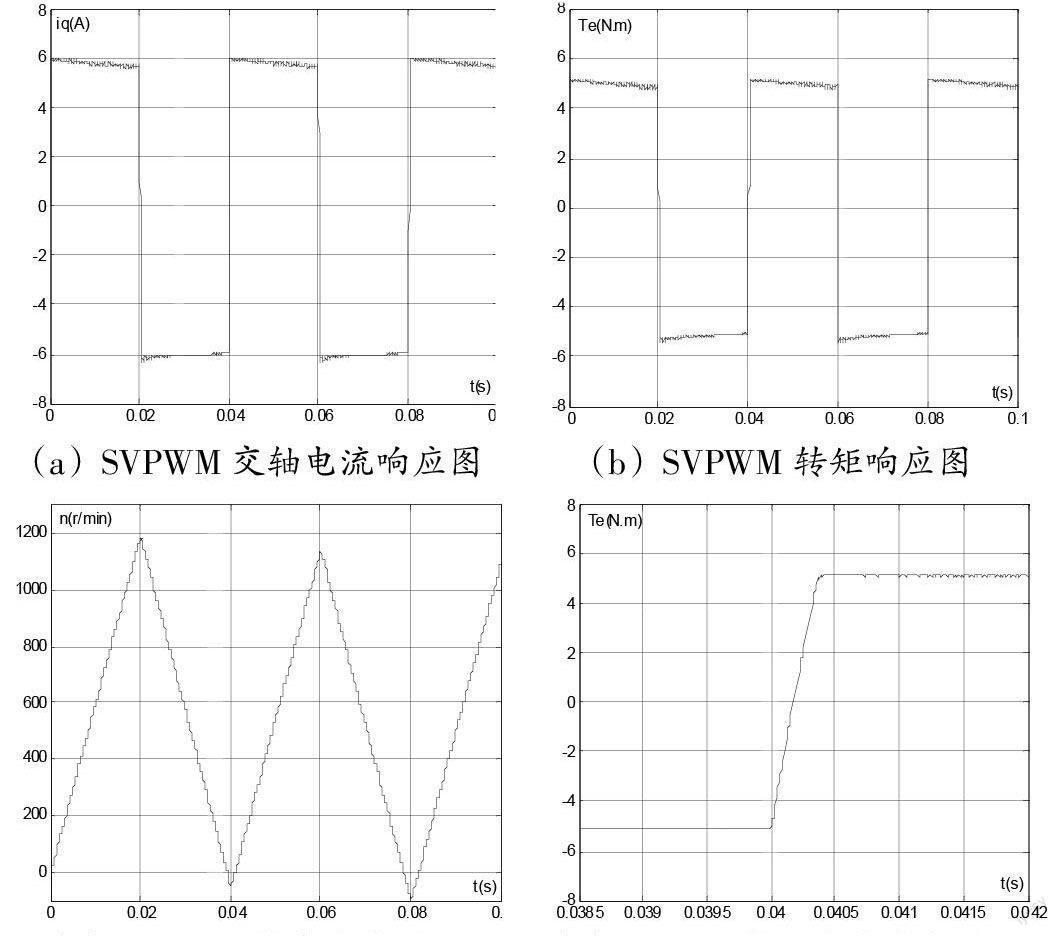
(2)速度环开环时,在系统空载情况下给定幅值为±5A的方波参考交轴电流i*q信号时,系统交轴电流、转速和转矩响应。
由图5仿真波形, 可得出结论如下:
在参考交轴电流±5A切换时, 转矩响应时间为0.00035s, 转矩动态响应快速。波形符合理论分析, 具有较好的动态特性。
3 结束语
本论文通过对矢量坐标变换、逆变器、空间电压矢量脉宽调制等技术的原理分析及建模仿真, 主要设计了一个基于空间电压矢量脉宽调制技术的永磁同步电机控制系统, 并在Matlab/Simulink对其进行仿真模拟。系统设计步骤为:系统构架、模块设计、系统设计和系统仿真结果分析。在这次完成论文的过程中, 我对所学的电力电子技术、自动控制原理、电机与拖动以及控制系统的MATLAB仿真与设计等知识有了更深层次的理解, 并在学习过程中积累了许多宝贵经验。从仿真结果的数据和波形来看, 系统的设计完全符合前期设计要求, 验证了理论的正确性。
参考文献
[1]李静,程小华.永磁同步电机的发展趋势[J].防爆电机.2009, 44(05):17-19.
[2]谭蒂娃.永磁同步电机的发展[J].伺服控制.2010, 22(11):20-22.
[3]唐介.电机与拖动[M].高等教育出版社.2007:32-34.
[4]张佳.变频器的相关研究[J].电气电子教学报.2009, (05):11-15.
[5] 李志武.异步电机矢量控制系统的研究与实现[J].哈尔滨工程大学学术论文期刊.2010:44-46.
[6] 洪乃剛.电力电子、电机控制系统的建模与仿真[M].机械工业出版社.2010:188-191.
[7]赵利.电压空间矢量PWM控制技术的探讨[J].电气电子教学学报.2011, (06):22-27.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
电子制作(2019年23期)2019-02-23
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
中学数学杂志(初中版)(2016年5期)2016-11-01
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
河南科技(2014年5期)2014-02-27
中国石油大学学报(自然科学版)(2013年6期)2013-03-11
