
制袋机连续送料嵌入式控制系统开发*
2014-02-10 10:34:55彭泽光许美强张宪民
机电工程技术 2014年3期
彭泽光,陈 忠,许美强,张宪民
(1.广东中包机械有限公司,广东潮州 515638;2.华南理工大学机械与汽车工程学院,广东广州 510640)
制袋机连续送料嵌入式控制系统开发*
彭泽光1,陈 忠2,许美强1,张宪民2
(1.广东中包机械有限公司,广东潮州 515638;2.华南理工大学机械与汽车工程学院,广东广州 510640)
论述了制袋机不间断接驳恒张力送料的动作特点与完成了其嵌入式顺序/伺服控制系统设计。针对制袋机高速运行下对连续送料的要求,提出了基于ARM 7 TDMI与嵌入式mC-OSII实时操作系统的连续送料单元的控制系统体系结构,实现了嵌入式顺序/伺服控制系统。实际运行表明,所提出的制袋机恒张力连续送料嵌入式顺序/伺服控制系统达到预期要求。
制袋机;连续送料;控制
包装机械是机械工业的重要组成部分,而软包装机械是包装机械的重要分支。制袋机装备是完成制袋工艺的软包装机械,主要是利用塑料的热塑原理,涉及牵引、送料、烫压热封、冲切等工艺,将印刷好的薄膜制成包装袋,广泛应用于食品、化工、医药等众多关系国计民生的重大行业[1-3]。制袋机送料工序的不停机膜料接驳是确保制袋机工作进程连续运行的关键[4]。目前,国内很多制袋机采用停机接驳换料的方式,由操作者采用停机、膜料始末端接驳、启动的步骤。这种接驳方式一方面增加了工人的劳动强度,另一方面严重影响了制袋机运行效率,制约了其工作节拍的提高。
为此,本文针对现有制袋机送料动作与接驳的缺点,提出了一种基于嵌入式控制系统的制袋机不间断送料接驳控制系统,实现了制袋机高速连续送料。论文简述了制袋机一般加工工序及送料动作要求与特点,设计一个基于ARM嵌入式不间断送料控制子系统,包括系统结构设计与软件模块设计。该控制子系统在高速三列制袋机上得到了成功应用。
1 制袋机加工工艺与送料工序的动作特点
1.1 制袋机加工工艺
软包装制袋机的加工过程是在薄膜连续运动的过程中完成的。卷状膜料经过动定送料对辊及恒张力送料控制系统完成膜料的输入,通过缓冲与纠偏机构,由输出牵引辊把膜料折叠成型段,成型后的膜料通过定长牵引送入纵向热封段,然后又经定长定位牵引,把膜料送入横向热封段,其输出的热封后的膜料经过冲切,完成具有良好密封性的成品袋的加工。其过程如图1所示。
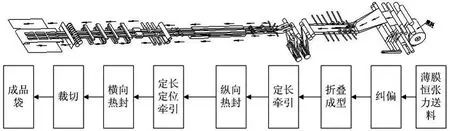
图1 制袋机工作流程示意图
1.2 制袋机送料段的动作特点
如图2所示,制袋机薄膜送料的动作包括牵引送料电机的驱动、纠偏电机的驱动、储膜架提升气缸的驱动、下置膜架的驱动和磁粉恒张力单元的制动。对这些动作的协调控制即可以实现不间断恒张力薄膜送料。一般制袋机工作时,放置于上置膜架上的膜料从送料牵引辊恒张力送出,进入储膜架。膜料经过储膜段的缓冲,再由输出导向辊输出。纠偏动作贯穿于整个送料过程,通过光感的膜料位置探测,控制器连续自动发出纠偏指令,驱动纠偏电机调整膜料的横向位置。这是一个正常连续的带有纠偏动作的送料过程。
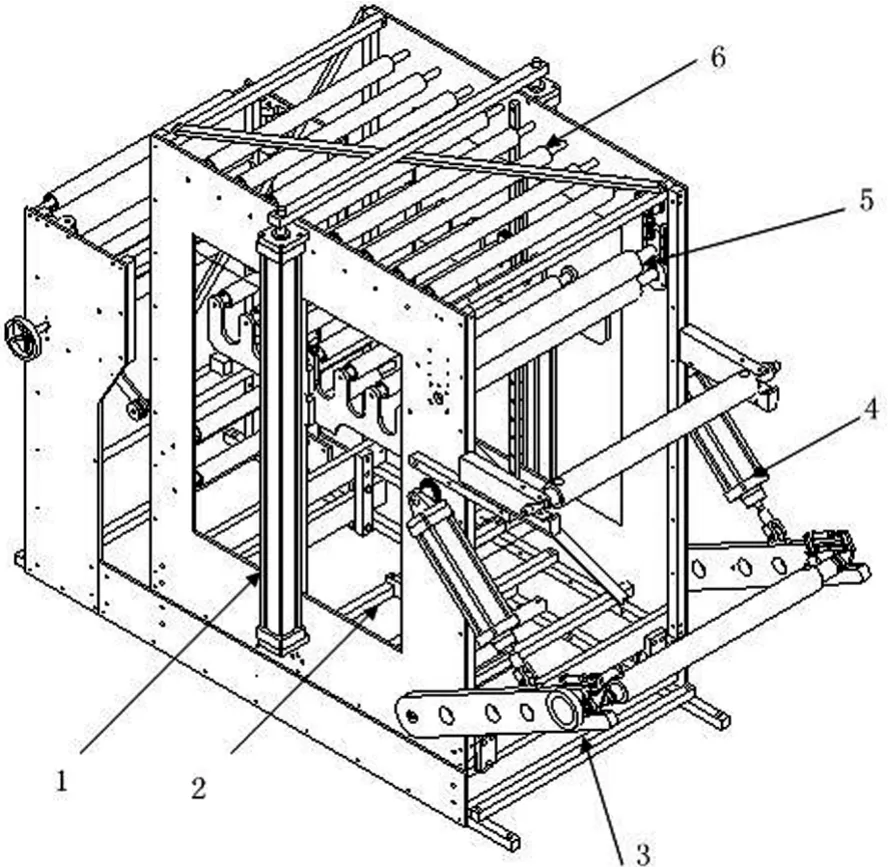
图2 制袋机送料段结构示意图
当上置膜架上的膜料快要用尽时,要更换新的薄膜卷材。涉及到一个动作序列:膜料抬升气缸抬升已放好新的薄膜卷材的下置膜辊到上置膜架;送料牵引辊电机停止运转并锁死;缓冲辊提升气缸把下缓冲辊缓慢提升;手工接驳膜料;送料牵引辊电机启动、缓冲辊提升气缸缓慢下降到位。在这个动作序列中还涉及两个持续的控制过程:膜料纠偏反馈控制和送料电机启动后的恒张力送料控制。
2 制袋机送料端的嵌入式控制子系统
针对制袋机不间断接驳送料动作的特点,设计了嵌入式顺序与伺服驱动控制系统,完成控制体系规划、软件系统设计。
2.1 送料嵌入式控制子系统体系结构
针对制袋机不间断接驳送料与恒张力送料的要求,设计如图3所示的嵌入式顺序与伺服运动控制体系结构。采用触控式人机界面,并与所设计的嵌入式控制器采用MODNUS通讯协议,实现监控与指令数据的通讯传输。不间断接驳恒张力送料的嵌入式控制器采用ARM 7 TDMI微处理器,并采用mC-OSII嵌入式实时操作系统,完成了送料牵引伺服驱动的恒张力PID控制模块、纠偏电机薄膜横向位置调控的PID控制模块以及不间断接驳顺序顺序控制模块等。实现了不间断接驳恒张力送料的独立控制单元,并与制袋机中央控制器组成了集总控制系统。
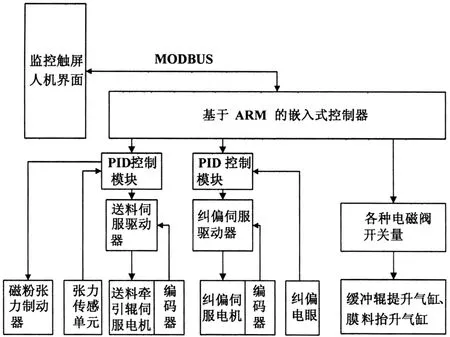
图3 嵌入式伺服驱动同步控制系统
2.2 嵌入式软件系统
由于制袋机对送料段的要求是不间断连续送料,因此在软件设计上针对其动作特点,以顺序控制模式设计了一个不间断接驳过程的自动控制流程,如图4流程图的左边所示。同时针对在送料过程中对恒张力控制与薄膜横向位置纠偏控制的独立性,专门设计了张力控制模块与纠偏控制模块,其流程图如图4流程图的右边所示。为了尽可能做到薄膜接驳过程的自动化与智能性,采用了两个传感信号:膜料用尽与膜料接驳完毕。对膜料用尽的感知采用光电探测器的探测信号;对膜料接驳完毕采用人工触发信号,因为接驳过程要采用人工操作。
Development of Embedded Control System for Continuous Film Feeding of Bag-Making Machine
PENG Ze-guang1,CHEN Zhong2,XU Mei-qiang1,ZHANG Xian-min2
(1.Guangdong ZHONGBAO Machine Co.,Ltd.,Chaozhou515638,China;2.School of Mechanical&Automotive Engineering,South China University of Technology,Guangzhou510640,China)
Disscussed the action characteristics of contineous feeding of films with constant tension in a bag-making machine and designed its embedded real-time sequential/servo control system.According to the requirements of contineous feeding in high running speed of a bag-making machine,a control architecture of contineous feeding based on ARM 7 TDMI micro-processor and mC-OSII embedded real-time operating system is presented,and an embedded sequential/servo control system is realized.The practical application indicates that the embeed control system for contineous feeding of films with constant tension attain the expected requirements.
bag-making machine;contineous feeding;control
TP273
A
1009-9492(2014)03-0045-02
10.3969/j.issn.1009-9492.2014.03.013
*2012年广东省数控一代机械产品创新应用示范重大项目(编号:2012B011300001)
2013-09-29
猜你喜欢
建材发展导向(2023年5期)2023-03-15 03:30:10
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
光源与照明(2019年4期)2019-05-20 09:18:18
中华诗词(2018年4期)2018-08-17 08:04:12
铁道通信信号(2018年2期)2018-04-18 12:18:23
电线电缆(2017年2期)2017-07-25 09:13:35
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
电镀与环保(2016年3期)2017-01-20 08:15:32
电源技术(2015年12期)2015-08-21 08:58:58
