
模糊PID控制的原子力显微镜仿真平台
2014-02-03 03:14:02李英姿张立文蒋沙汝钱建强
实验室研究与探索 2014年1期
阳 睿, 李英姿, 张立文, 蒋沙汝, 钱建强
(北京航空航天大学 a.仪器科学与光电工程学院; b.物理科学与核能工程学院; c.数学与系统科学学院,北京 100191)
0 引 言
原子力显微镜(Atomic Force Microscope,AFM)具有原子级成像能力,是纳米技术研究的主要工具,其工作模式分为动态力模式和静态力模式[1],幅度调制模式为动态力模式的一种,工作在幅度调制模式下的AFM又叫幅度调制原子力显微镜(Amplitude Modulation Atomic Force Microscope,AM-AFM),其对探针和样品的损伤较小,还有较高的分辨率和线性工作范围,已成为AFM应用得较为广泛的一种工作模式[2-3]。
目前,我校本科实验用原子力显微镜仿真平台主要采用传统的PID控制器进行控制[4],实验操作者往往需要反复调试才能找出一组控制效果较好的离线PID参数[5-8],因此,在传统PID控制器基础上加入模糊系统的模糊PID控制器,实现了对PID参数的实时在线调整,相较于传统PID能取得更好的控制效果。本文利用欧拉-伯努利方程对AM-AFM的动态过程进行建模,建立一套AM-AFM的仿真平台,并以此检验模糊PID控制器对AM-AFM的控制效果。
1 仿真平台的建立
AM-AFM工作时,探针在激励信号驱动下进行振动,针尖周期性地与样品接触,将振幅与设定振幅之差输入控制器产生控制量,对压电陶瓷的伸缩量进行调整,使偏差趋于零,进而扫描出样品表面形貌。
AM-AFM系统结构如图1所示。探针在其谐振频率附近以几十纳米的振幅振动,假如样品高度增大,由于探针跟踪的迟滞效应,探针-样品间距离变小,引起探针振幅减小,由激光检测器测得输出振幅与设定振幅的偏差,PID控制器根据该偏差减少z方向压电陶瓷管两端电压,提高探针高度,减小偏差,使得探针振幅尽可能保持在设定振幅,从而控制探针跟踪样品表面。为使模型简化,将压电陶瓷看成比例系数为1的线性环节。
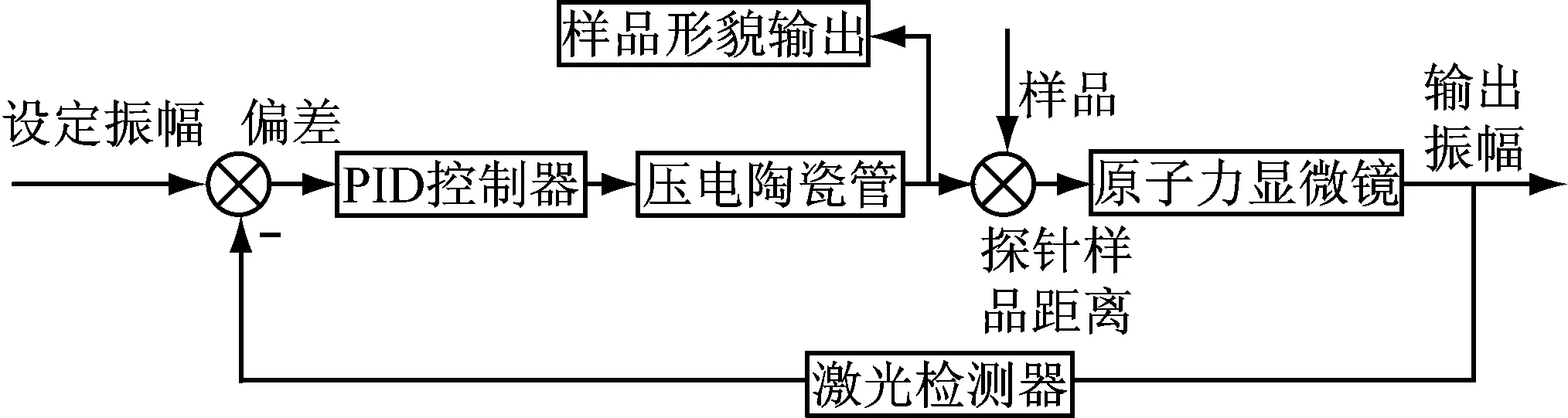
图1 幅度调制原子力显微镜系统结构图
AM-AFM悬臂梁可看做一个弹性梁,其运动可以用欧拉-伯努利方程来描述[9]:
(1)
式中:w(x,t)为挠度,探针运动即为x=L时悬臂梁的挠度w(L,t);F0cosωt为作用于悬臂梁上的激励信号;F(zc,z)为探针与样品之间的相互作用力。
探针在扫描运动过程中会经历接触与非接触两种情形,由原子间距离a0进行划分。当距离大于a0时,针尖与样品之间的相互作用力为范德瓦尔斯力[10];当距离小于a0时,针尖与样品之间的斥力用DMT(Derjaguin-Müller-Toporov)[11]计算,则针尖与样品的相互作用F(zc,z)可以表示为
(2)
式中:A为Hamaker常数;R为探针针尖的曲率半径;E为样品的弹性模量;ν为样品的泊松比;η为黏性系数;h为样品厚度;zc为悬臂梁的平衡位置;a0为原子间距离;E*为等效刚度。
利用振型分解法可以将欧拉-伯努利方程转化成形如下式的n个常微分方程的求解[12]:
(3)
最终求解出探针运动函数w(L,t)为
(4)
2 模糊PID控制器设计
目前,AM-AFM一般采用PID控制器,传统PID控制器的表达式如下:
(5)
式中:e(t)为误差信号;uPID为控制量,即悬臂梁高度;Kp、Ki、Kd分别是比例、积分、微分系数。模糊PID控制器在传统PID控制器上加入模糊系统,从而实现更加有效的控制。
2.1 模糊PID控制器的结构
模糊PID控制器在传统PID控制器的基础上,加入了一层模糊推理机,对PID控制器的Kp、Ki、Kd参数实现了实时在线调整,结构如图2所示,克服了传统PID控制器中存在的参数修改不方便、不能自整定等缺点,进一步完善了控制器性能,更好地适应了控制系统参数和工作条件的变化。

图2 模糊PID控制器结构
2.2 模糊中心和隶属度函数的选择

假定Kp∈[Kpmin,Kpmax],Kd∈[Kdmin,Kdmax],并依据Kp0、Ki0、Kd0,将范围取为:Kpmin=0.004Kp0,Kpmax=1.033Kp0,Kdmin=0.7Kd0,Kdmax=2.35Kd0。
为了方便,本文将参数Kp、Kd归一化为0~1之间的数,有:
(6)

(7)
假定积分时间常数与微分时间存在如下倍数关系:
Ti=αTd
(8)
则积分增益可以通过下面的式子算出来:
(9)

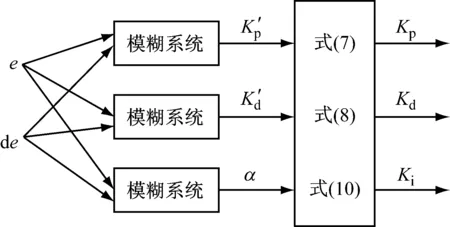
图3 PID参数换算图
假定模糊系统的输入偏差e和偏差变化率de的论域为连续区间[emin,emax]和[demin, demax],将其分为7个模糊子集,分别用负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)来描述,皆选用三角形隶属度函数,如图4所示。

图4e和de的隶属度函数

图5 K′p和K′d的隶属度函数图6 α的隶属度函数
2.3 模糊规则的建立
模糊规则的建立要从系统的稳定性、响应速度、超调量和稳态精度等方面考虑:比例系数Kp的作用是加快系统的响应速度,Kp过大,易产生超调,过小,则会使相应速度变慢,从而延长调节时间;积分系数Ki的作用是消除系统的静态误差,Ki越大,系统的静态误差消除越快,但Ki过大,在响应过程的初期会产生积分饱和现象,引起较大超调,Ki过小,将使系统静态误差难以消除;微分系数Kd的作用是改善系统的动态特性,在响应过程中对偏差变化进行提前预报,但Kd过大,会使响应过程提前制动,延长调节时间。
由此根据专家经验总结出以下规律:



表1 的模糊规则表
3 仿真结果
基于上述仿真平台,分别用PID控制器和模糊PID控制器对两个典型样品信号进行仿真,通过扫描图像的对比,检验模糊PID对AM-AFM扫描过程的控制效果,仿真结果如下:

表2 的模糊规则表

表3 α的模糊规则表
(1) 样品为高20 nm的一维台阶信号,仿真图像如图7所示,其参数设置如下:
PID控制器参数初值:Kp0=0.052,Ki0=618,Kd0=2.109×10-6。激励频率f=44.8 kHz,自由振幅Afree=50 nm,工作振幅Aset=30 nm,扫描速度v=2 μm/s,采样周期与振荡周期之比n=5。Hamaker常数10-19J,探针针尖半径Rtip=20 nm,样品杨氏模量Esample=50 GPa,探针杨氏模量Etip=130 GPa,样品及探针泊松比υsample=υtip=0.3。
图7显示了样品用传统PID扫描和模糊PID扫描的图像。传统PID的参数取为Kp0、Ki0、Kd0,也就是模糊PID控制器的初始值。x坐标是采样周期数,y坐标是垂直高度,扫描图显示为探针平衡位置高度。由图可见,传统PID扫描图像上升沿的调节时间约为50个采样周期,而模糊PID扫描图像约为20个采样周期,

图7 台阶信号扫描对比图
且超调量约为1.85%,由此可知采用模糊PID控制,系统在保持着极高的稳定性的同时,快速性也得到了很大的提高。
(2) 样品为最大起伏至25 nm的三维复杂信号,仿真图像如图8所示,参数设置只需将上例中的扫描速度改为v=6.6 μm/s,采样周期与振荡周期之比改为n=10,其余设置相同。
图8中,深灰色曲面的是样品,浅灰色曲面是扫描图像。图8(a)为传统PID扫描图,图8(b)为模糊PID扫描图。x,y轴表示采样周期数,z轴表示垂直高度,扫描图显示为探针平衡位置高度。三维复杂样品的仿真结果直观地体现了模糊PID对探针扫描过程的控制效果,可以看出(a)中图像较样品图像有较大的滞后,相比之下,(b)中图像更好地跟踪了样品表面,尤其是对于传统PID难于跟踪的凹坑,模糊PID控制的扫描图像滞后明显小于传统PID,更显示出前者控制品质的优越性。

(a) 传统PID

(b) 模糊PID
4 结 语
基于欧拉-伯努利模型对AM-AFM探针动态过程进行建模,建立了一套AM-AFM仿真平台。对AM-AFM扫描样品表面过程进行有效的仿真,不仅为AM-AFM本科生实验操作者提供了一定的指导,也为检验
模糊PID对AM-AFM的控制效果提供了有效的手段;结合Ziegler-Nichols法调出一组初始PID参数,将此初值运用于模糊系统参量范围的确定及模糊中心和隶属度函数的选择上,并通过模糊系统适当地对PID参数进行实时调整,使得模糊PID控制取得了良好的控制效果;通过平台进行扫描仿真直观地反映出模糊PID对表面起伏较大的样品扫描跟踪具有较高的准确性和快速性, 明显地体现出模糊PID相比于传统PID控制的优越性,并为今后将模糊PID等智能控制运用于AFM实际操作等更深一步的工作提供了一定的依据。
[1] Binnig G, Quate C F, Gerber C. Atomic force microscope[J]. Physical Review Letters, 1986, 56(9):930.
[2] Hölscher H, Schwarz U D. Theory of amplitude modulation atomic force microscopy with and without Q-Control[J]. International Journal of Non-Linear Mechanics, 2007, 42(4): 608-625.
[3] Rodríguez T R, García R. Tip motion in amplitude modulation (tapping-mode) atomic-force microscopy: Comparison between continuous and point-mass models[J]. Applied Physics Letters, 2002, 80(9): 1646-1648.
[4] 李小凤,蒋沙汝,朱丽瑗.幅度调制原子力显微镜仿真平台[J].大学物理,2011,30(7):51-55.
Li Xiao-feng, Jiang Sha-ru, Zhu Li-yuan. A simulation platform for amplitude modulation atomic force microscope[J]. College Physics, 2011,30(7):51-55.
[5] 梁 军,符雪桐,吕勇哉.自适应 PID 控制—— I. 基本原理与算法[J]. 浙江大学学报(工学版),1994(5):523-529.
Liang Jun, Fu Xuetong, Lu Yongzai. Adaptive PID controller—Part l. The basic principle and algorithm[J]. Journal of Zhejiang University (Engineering Science), 1994(5):523-529.
[6] Ando T, Uchihashi T, Fukuma T. High-speed atomic force microscopy for nano-visualization of dynamic biomolecular processes [J]. Progress in Surface Science, 2008, 83(7): 337-437.
[7] Rivera D E, Morari M, Skogestad S. Internal model control: PID controller design[J]. Industrial & Engineering Chemistry Process Design and Development, 1986, 25(1): 252-265.
[8] Shaw J A. Analysis of traditional PID tuning methods[C]// Advances in Instrumentation and Control Conference, Chicago, 1993:391-397.
[9] Rabe U, Janser K, Arnold W. Vibrations of free and surface‐coupled atomic force microscope cantilevers: theory and experiment[J]. Review of Scientific Instruments, 1996, 67(9): 3281-3293.
[10] Israelachvili J N. Intermolecular and surface forces[M]. San Diego: Academic Press, 1992.
[11] Derjaguin B V, Muller V M, Toporov Y P. Effect of contact deformations on the adhesion of particles[J]. Journal of Colloid and Interface Science, 1975, 53(2): 314-326.
[12] 张震庭,王志培. 结构振动力学[M].2版.上海:同济大学出版社,2005.
[13] Stark R W, Heckl W M. Fourier transformed atomic force microscopy: tapping mode atomic force microscopy beyond the Hookian approximation[J]. Surface Science, 2000, 457(1): 219-228.
[14] Svrcek W Y, Mahoney D P, Young B R. A real-time approach to process control[M]. Wiley Com, 2013.
[15] Hang C C, Sin K K. A comparative performance study of PID auto-tuners[J]. Control Systems, IEEE, 1991, 11(5): 41-47.
[16] 王立新, 王迎军. 模糊系统与模糊控制教程[M]. 北京:清华大学出版社, 2003.
猜你喜欢
计量学报(2022年11期)2022-12-20 07:57:14
石油沥青(2022年3期)2022-08-26 09:13:44
电子制作(2019年14期)2019-08-20 05:43:44
分析化学(2017年12期)2017-12-25 01:10:38
少年文艺·开心阅读作文(2017年7期)2017-08-05 12:42:46
股市动态分析(2016年24期)2017-01-07 08:56:09
股市动态分析(2016年23期)2016-12-27 19:05:06
股市动态分析(2016年4期)2016-09-29 08:42:21
股市动态分析(2016年25期)2016-07-23 07:31:08
学生天地(2016年33期)2016-04-16 05:16:32
