车辆实时智能并行停车系统
2014-02-03 11:55
汽车文摘 2014年2期
车辆实时智能并行停车系统
平行停车对于驾驶员来说是一项较困难的操作,提出了一种在线运动规划的方法,通过寻找停车空间、规划停车路径这两个阶段,使车辆象在非完整约束下的移动机器人一样自动向后平行停车。
在寻找停车空间过程中,常用到红外线、超声波和无线电传感器。随着技术的发展,图像处理和神经元网络方法也应用于该过程中,每隔一段时间在停车场地拍照,然后应用图像处理技术提取停车场地的特点,通过多组图片估计车辆可能的停车位。
在停车路径的规划中,由于障碍物的存在,控制系统必须考虑两个方面:避开障碍、到达指定停车位置。目前通常使用模糊逻辑算法来计算停车路径,该算法通过熟练驾驶者的行为经验得出,同时与神经网络结合,在传感器信息的基础上建立神经-模糊控制网络。
为了避免与障碍物相撞,停车路径起始点适合区域的确定要考虑3个方面的限制:障碍物所处环境、车辆和障碍物的距离、相对于最终位置的车后轮转角(图1)。
采用Matlab软件进行仿真验证。仿真环境为二维笛卡尔坐标,将车辆看成特定尺寸的矩形,其尺寸小于停车场地。车的长度和宽度分别设定为4.5m和1.5m,停车空间的长度是车长的1.8倍。仿真结果如表1。
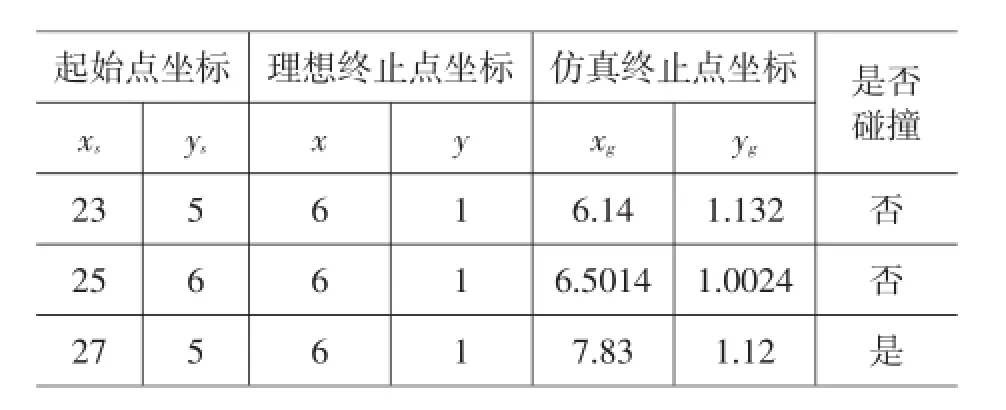
表1 仿真结果
仿真结果表明,起始位置对智能停车过程有着关键性的影响。
Parisa Masoumi Moghri et al.2012 IEEE The 16th CSI International Symposium on Artificial Intelligence and Signal Processing(AISP 2012).
编译:周冲
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
动漫界·幼教365(大班)(2021年4期)2021-05-23
阅读(快乐英语高年级)(2020年6期)2020-08-28
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
数学大王·低年级(2019年12期)2019-08-14
好孩子画报(2019年10期)2019-01-10