真空吸盘式管片拼装机在盾构上的应用
2014-01-31 03:44常巍峰袁文征
建筑机械化 2014年4期
常巍峰,王 鑫,袁文征
(中铁工程装备集团有限公司,河南 郑州 450016)
盾构是一种大型暗挖隧道掘进设备,管片拼装机是盾构的一个重要组成部分,用来拼装衬砌管片,具有锁紧、平移、升降、仰俯、回转、横摇和偏转等动作,各种动作配合使用来实现管片的定位与安装。
拼装机夹具的构造因管片构造的不同而异,并将影响管片组装作业及效率。通常使用的夹具有手动螺旋机械式、液压缸机械式和真空吸盘式。其中手动螺旋机械式需要手工劳动,效率较低,已经很少使用;液压缸机械式抓举管片动作可靠,具有联锁功能,当管片过重时机械式抓举头的抓举力将超过管片的承受力,此时液压缸机械式也不再适用。因此,真空吸盘式的抓举方式是适用范围更广、使用安全性更高的一种方式。
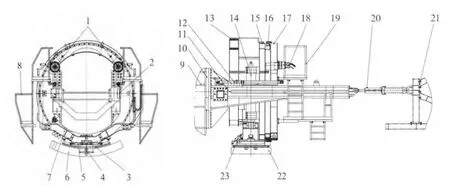
图1 真空吸盘式管片拼装机结构
1 管片拼装机的结构特点
图1是在国外某地铁隧道施工项目中使用的真空吸盘式管片拼装机,由托梁、平移机构、举升机构、举重臂、回转机构、真空吸盘、工作平台、管路支架等组成。托梁连接主机部分与后配套拖车;移动架通过左右各2个滚轮安装在拼装机托梁的行走槽中,回转架通过回转支撑与移动架连接,举重臂通过2根提升油缸(红、蓝缸)与回转架连接,真空吸盘则连接在举重臂上。该管片拼装机有6个自由度:前后移动(0~2000mm)、旋转(±200°)、油缸的同步伸缩(0~1200mm)、油缸的不同步伸缩(±5°)、抓举装置的俯仰(±5°)、抓举装置的旋转(±5°)。
管片拼装机以电机带动液压泵作为动力源,通过遥控器进行操作,管片拼装机的伸缩、旋转和移动等功能都是比例控制的,可以对管片实现精确定位。
假设真空吸盘在管片拼装机正下方的位置,整个管片拼装机(包括移动架、回转架、提升油缸、举重臂和真空吸盘)在2个平移油缸的控制下可以实现在托梁上沿隧道轴线方向平移;旋转马达安装在移动架两侧,可以控制回转架、举重臂和真空吸盘顺时针、逆时针旋转200°;通过提升油缸(红、蓝缸)上升或下降举重臂和吸盘;再通过提升油缸的不同步伸缩配合举重臂左侧连接销的左右滑动,可以使举重臂和吸盘实现在左右方向上的摆动;真空吸盘竖直方向上的摆动和水平方向上的旋转是由俯仰油缸和旋转油缸的调节实现的。这样在拼装管片时,就可以实现6个自由度动作使管片准确定位。
2 真空吸盘的工作原理及设计
2.1 工作原理
采用真空吸盘抓取管片的工作原理是通过抽取真空,抽出吸盘内部的空气,真空吸盘通过1kg/cm2(按100%真空度计算)的气压作用于物体。真空吸盘的3个主要优势如下。
1)使用简单 已储存在真空腔的真空被转移到真空吸盘中,取放管片都是瞬间完成的,操作人员只需按下按钮,任务便轻松完成。
2)安全性高 即使在真空泵断电的情况下,真空腔内的真空也可以保证负载持续几个小时不掉落。真空度由真空开关及真空表来控制,可通过真空表来观察漏气情况,只要腔内存有真空负载就不会掉落。
3)生产效率高 真空吸盘只需要几秒就可以完成取放过程,而原来机械式抓取则需要几分钟才可实现。真空吸盘与产品接触后,既不会在产品上留下痕迹,也不会损坏产品,而这要归功与一种特殊橡胶的使用。
真空吸盘总成主要由真空系统、真空吸盘、机架等组成,其工作原理参见图2。
真空吸盘总成安装在举重臂上,工作时管片机带动真空吸盘运动到位后,真空吸盘紧贴在钢筋混凝土管片的内弧面上。真空泵通过单向阀抽空真空腔内的空气,同时维持真空腔的真空度大于或等于80%即可吸住管片。换向阀位于A侧重物被举起,换至B侧重物被释放。在此位置脱离吸盘,可进行下一次的抓举工作。
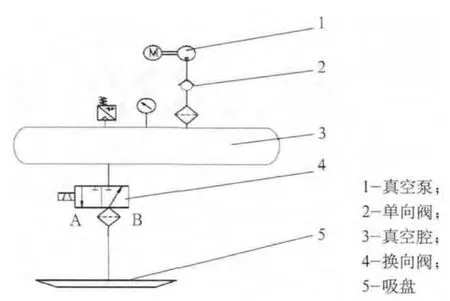
图2 真空吸盘工作原理图
2.2 真空吸盘设计
在满足吸力要求的情况下应尽量选取较低的真空度,根据经验取真空度百分数≥80%,此时吸盘与管片之间空腔内的压强≤20kPa。根据被吸管片的表面状态及抓举重量,采用1.5kW旋片式真空泵,最大空气流量为50m3/h。
管片实际最大重力为26kN,K块重力为8.5kN,按照真空吸盘最大抓取能力为35kN、中心吸盘抓取能力为12kN进行设计。考虑到隧道设备的特殊性和实际吸吊时的各种意外因素,设计时选取较高的安全系数,一般可取2.5~3[2],在正常工作状态时选用的真空泵可维持真空度百分数在95%~98%,即可计算出吸盘实际所需要的吸附面积。
由于管片形状为圆弧状,采用多个吸盘分别均布吸附在管片上,将对管片的均匀受力十分有利,可以保证运输拼装的质量;而且沿管片圆周方向吸盘的弧长较短,也可以更好地保证吸盘与管片的接触密封性[2]。在拼装封顶块(K块)时中心吸盘单独抓取,同时为了安装管片螺栓的需要,要求中心吸盘可以相对于其他两个吸盘单独进行伸缩动作,参见图3。
2.3 真空储气罐
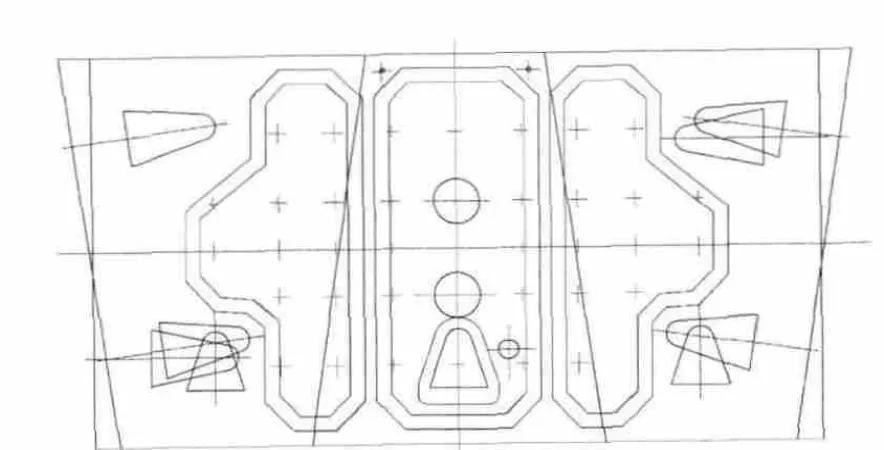
图3 真空吸盘与管片
管片拼装机由于结构紧凑,盾体内部空间有限,无法设置单独的真空储气罐,因此一般把真空腔设置在管片拼装机结构内部。常用的真空腔结构有两种:第一种将真空腔设计于回转架内部,优点是空间充足,允许设计较大的真空腔容积,缺点是距离真空吸盘工作位置较远,真空管路较长,增加了真空泄露点,降低了真空吸盘的反应灵敏度;第二种将真空腔设计于举重臂内部,其优缺点与第一种方案正好相反。在实际应用过程中,如果管片重量较重,常采用第一种方案,而较轻的管片则采用第二种方案,本项目采用第二种方案的真空腔设计。真空腔的容积大小与真空吸盘断电后保压时间的长短有关系。当真空吸盘断电后保压时间为15min时,一般真空腔容积应为吸盘容气量的10倍以上。真空吸盘工作时,吸盘上的密封条会发生变形,经试验,当真空度达到80%时,变形后吸盘腔内的高度为10mm,据此可计算出真空腔的容积[3]。
2.4 真空吸盘的定位及管片识别装置
使用真空吸盘抓取管片时,需要将真空吸盘与管片精确定位。在真空吸盘后部有两个激光定位装置,对应管片上的两个定位孔,移动真空吸盘使两束激光打到两个定位孔中,说明位置已经对准,可以将真空吸盘下降进行抓举了;在中心吸盘上有两个安全销,用来固定管片,防止管片在拼装的过程中滑动或者旋转,并且可以吸收放置管片时产生的剪切力以防止真空失效。
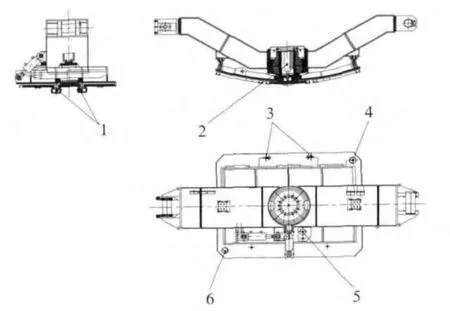
图4 真空吸盘示意图
管片分封顶块(K块)和其它块两种类型,封顶块(K块)的大小一般只有其它块的1/3大小。本项目的K块识别方案为:管片拼装机吸盘设计有3个接近开关分别位于左、右真空吸盘及中心真空吸盘处,当只有中部接近开关顶起,左右两个接近开关没顶起时,系统识别为K块;当3个接近开关均顶起时,系统识别为其它块。
3 建 议
真空吸盘大大提高了拼装管片的工作效率,降低了人工劳动强度。为了确保真空吸盘工作正常,每天必须检查真空吸盘的密封情况,及时更换已损坏的密封条,根据使用经验,每3个月需要对密封条进行一次更换。每天必须检查衬垫的橡胶密封,及时更换已损坏的橡胶密封,检查管片安全销是否损坏。每天清理真空泵进气和排气的滤芯,检查真空软管是否存在破损和漏气的情况,真空压力表是否工作正常,报警器、报警灯在出现故障情况下是否能正常报警,真空压力传感器的安全防护,K块检测器传感销子是否伸缩正常。
[1]徐成海.真空工程技术[M].北京:化学工业出版社,2006.
[2]邓嘉鸣,沈惠平,高宗华,等.大吨位隧道混凝土管片真空吸吊翻转机的设计与研制[J].机械设计,2008,(8):76-78.
[3]容 锦.大型盾构管片吊机真空吸盘的研究及应用[J].铁道建筑技术,2012,(10):18-20+24.
[4]叶 忠.盾构管片拼装机原理及故障诊断与预防[J].隧道建设,2010,(4):486-491.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
中国特种设备安全(2022年2期)2022-07-08
水泵技术(2022年2期)2022-06-16
装备制造技术(2021年2期)2021-07-21
造纸信息(2019年7期)2019-09-10
劳动保护(2019年3期)2019-05-16
水利科技与经济(2017年5期)2017-04-22
发明与创新·中学生(2017年1期)2017-01-20
发明与创新(2017年2期)2017-01-18
制造技术与机床(2015年10期)2015-04-09