
智能小车对提高智能居家系统稳定性的应用研究
2014-01-24 02:35李玲香
湖南科技学院学报 2014年5期
李玲香 罗 鹏
(湖南科技学院 计算机与通信工程系,湖南 永州 425199)
智能小车对提高智能居家系统稳定性的应用研究
李玲香 罗 鹏
(湖南科技学院 计算机与通信工程系,湖南 永州 425199)
针对ZigBee智能居家系统中的网络节点覆盖范围受环境因素影响较大,网络可能出现不稳定的情况,从而导致智能居家系统整体性能下降的问题。论文设计了一个移动的ZigBee节点——智能小车,它可以识别用户家居环境中不同的房间及巡视居家环境,从而采集居家环境的不同地点传感器节点的数据,对故障节点进行修复。实验证明,在智能家居系统中加入智能小车可以降低系统出故障的概率,提高了系统的覆盖范围和稳定性。
智能家居;ZigBee;智能小车
0 引 言
当前,智能家居系统中的内部家庭网络所采用的连接技术可以“有线”和“无线”两大类[1]。有线方式虽然稳定可靠,但是布线困难,可可扩展性和维护性差,而无线技术以其传输灵活,移动性强等有线方式无法比拟的优点而成为智能家居联网技术的发展方向。近年来研究的无线传感网络ZigBee网络已经成为智能家居家内部组网的研究重点[2]。虽然Zigbee技术基本可以满足当前的组网需求,但是在网络容量,网络覆盖,抗干扰性等方面还存在不足[3]。无线智能家居网络节点通信范围小、稳定性差是现阶段智能家居网络需要解决的主要问题之一。
本文在搭建好ZigBee智能家居网络的基础上,采用广东天嵌公司的TQ2440开发板和三星公司的ARM9芯片,设计可以自动寻迹的移动ZigBee节点来提高智能家居网络的通信范围,增加网络的稳定性。
1 移动巡航节点必要性分析
智能家居系统内部网络拓扑常采用星型、树型和网状结构。对于灵活性、可靠性最优的网状网络,网络中有一条链路断开时,ZigBee协调器都会根据路由表找到新的传输路径,但是有一种情况如图-1所示,当节点B发生故障时,节点A就会脱离网络,为了解决这种突发情况,将节点C安装在拥有自动巡航功能的智能小车上,当节点B发生故障时智能小车搭载节点C通过红外寻迹,到达故障节点B的大概位置,对网络进行修复与补充。
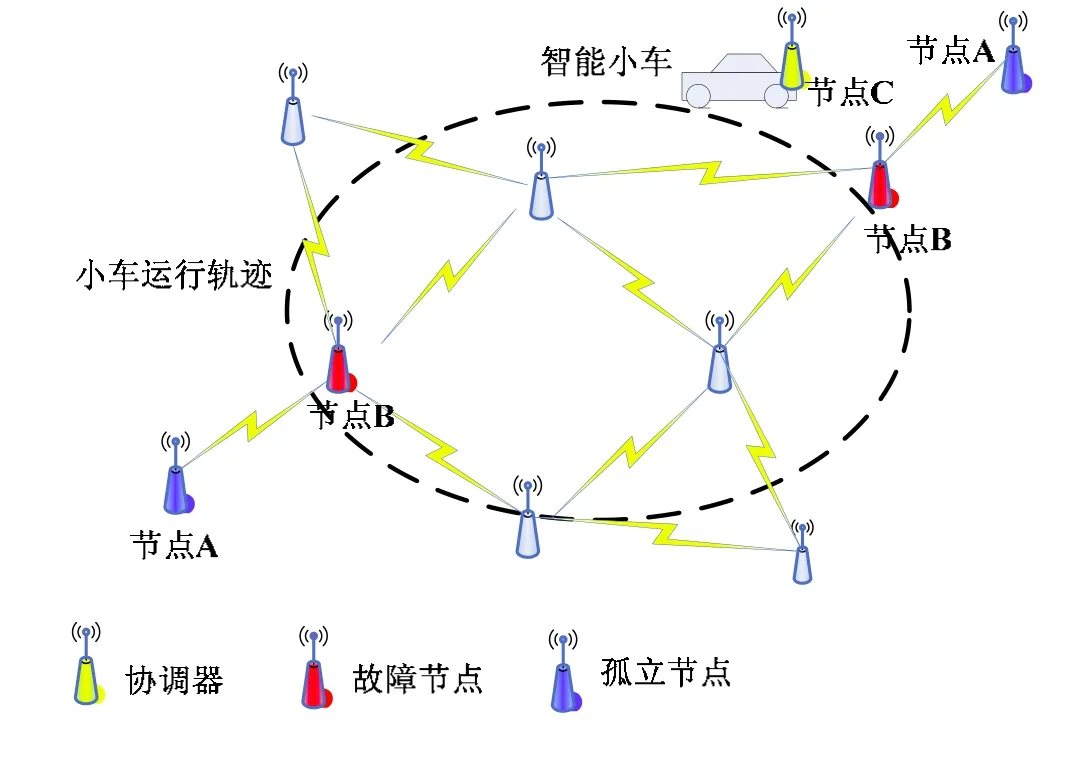
图1 智能小车排障示意图
如果用户对系统的连接时延,误码率要求非常高,可以采用星型网络结构,星型网络具有最低的网络复杂度,但是其网络覆盖范围与网络稳定性也是最低的,引入智能小车巡航功能也可以提高其网络覆盖范围。在星型网络中,智能小车必须安装ZigBee协调器,这样才能最大程度的提高网络的覆盖范围。
2 智能小车在智能居家系统中的应用实现
2.1 智能小车寻迹策略实现
智能小车的巡航功能要通过寻迹算法实现智能小车对任务点的识别和智能小车出轨后的寻线动作[4]。本文中的智能小车采用文献[4]中红外线寻迹策略,在智能小车的车头部分安装了8个红外传感器,用于检测小车行驶路径。每个传感器间距20mm,在制作寻迹道路的时候,将道路的宽度定为40~45mm,通过检测到黑色路径的传感器编号来确定小车在道路中的位置,如图-2所示。智能小车通过寻迹路线预判路径的方向与转角,然后,通过安装在电机上的光电编码器码盘检测小车底部4个电机的传动速度,根据红外传感器获取到的道路情况,使用脉宽调制PWM控制技术调节4个电机的转速,从而达到小车转弯的目的[5]。

图2 红外寻迹与轨道示意图
图2中所示的每个红外线传感器之间的距离和黑线的宽度,这就使得小车在走直线时最少有2个红外传感器线检测到黑线,最多有3个红外传感器检测到黑线,如果用0表示红外传感器检测到白,用1表示红外传感器检测到黑,则智能小车就可以通过红外传感器获取黑线信息,从而控制小车的转向。
本文中的智能小车是通过4个由直流电机驱动的轮子不同转速来实现小车的转弯动作。由于处理器输出的信号功率不能驱动直流电机转动,所以通过2块电机驱动芯片L298N芯片来驱动4个直流电机。
2.2 任务点设置
智能小车虽然可以根据黑线的直与弯自动寻迹行进,但它只能按照用户规定的路线进行巡视。在智能家居系统中,用户往往需要获取不同地点、不同房间的环境信息,针对这个问题,本文通过在黑线上设置任务点,使得智能小车可以识别不同的房间和地点。
设置任务点的思想就是利用黑线和白线设置不同的排列组合,这些排列组合必须区别与正常行驶是的几种组合方式,当红外线传感器检测到的排列组合和开发者在程序中定义排列组合相对应的时候,小车就可以根据开发者在程序中对这种排列组合的描述来确定所处的房间位置。
由于实际环境中地面可能会出现裂痕、污点或杂物,这些因素会影响到红外线传感器对任务点检测,从而判断错误。在本文中的任务点选取了几种连续黑线或者不容易产生混淆的黑线设置方案,又由于小车的车体可能会有大概一个传感器距离的偏差,所以,最终可以明显辨别的黑线编码方式并不多,可用到的几种编码方式如图-3所示。

图3 五种任务点示意图
考虑到小车直行时车体位置可能出现的误差,对出现误差时任务点可能的情况进行分析,选出了五中辨识度较高的任务点设置方案,具体编码如表-1所示。

表-1任务点编码表
2.3 智能小车寻迹实现
本文寻迹算法的原理是根据红外线传感器获取的黑线情况估计小车与黑线的位置关系,然后通过调节左右轮子的转速,控制小车调整车体位置,从而达到转弯的目的,红外线传感器检测到黑线则发送1到处理器,否则就发送0到处理器,处理器收到红外线传感器发送来的数据,使用8次循环对8个传感器数据进行处理,红外线传感器从左到右依次赋以权重值i=0、1、2、3、4、5、6、7,a为传感器传送到处理器的信息0或1,通过公式(1)求得智能小车的转弯速度的权值,其中sum为检测到黑线的红外线传感器个数,通过公式(2)和(3)可以计算出小车过弯时右侧轮子和左侧轮子的转速,其中R可控制转角大小,V是小车直行是轮子的转速。可见当黑线在小车中间时,3、4号传感器检测到黑线时=0,和都等于小车直行是的转速;当黑线偏左时,为负数,变大,变小,小车做左转弯动作;当黑线偏右时,为正数,变小,变大,小车做右转弯动作。

智能小车识别任务点是在寻迹程序中定义了任务点对应的红外线传感器检测到黑线的情况,并把他们保存在数组之中,当红外线传感器输入值和数组之中的某一项相同时,则进入任务点,执行用户指定的任务动作。智能小车出轨后自动寻线动作要考虑到全白任务点的存在,当小车红外线传感器输入全零时,进入时间为2秒的延迟,期间小车继续直行,如果2秒延迟过后检测不到黑线,则智能小车向左转向90度,每隔一秒转角减小5度,这样,小车就会不断的增大转角做圆周运动,当重新检测到黑线是,继续通过黑线做寻迹行驶。图-4为智能小车软件实现流程图。
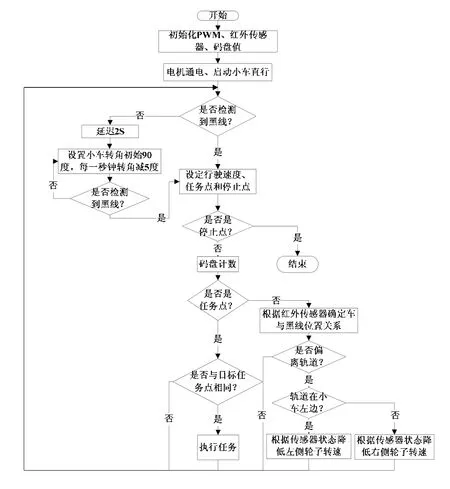
图4 智能小车程序流程图
3 实验与分析
为了获取ZigBee网络性能参数,本文将Z-Stack协议栈Profile文件夹下AF.c文件中的结构体afIncomingMSGP acket_t提取出来,在终端节点上连接CC Debugger仿真器,通过IAR的程序断定调试功能,检测不同时刻RSSI和LQI参数指标。
其中RSSI即为信号强度指示,是真实的接收信号强度与最优接收功率等级间的差值,RSSI在无线网络中表示信号的强度,它随距离的增大而衰减,通常为负值,该值越接近零,说明信号强度越高;LQI是链路质量指示,表示接收数据帧的能量与质量,其大小基于信号强度以及检测到的信噪比,由MAC层计算得到并提供给上一层,一般与正确接收到数据帧的概率有关[6]。图-5与图-6分别为协调器图5与图6分别为协调器与测试节点相距0~30米的无障碍环境中测得的RSSI指数与LQI指数分布图。
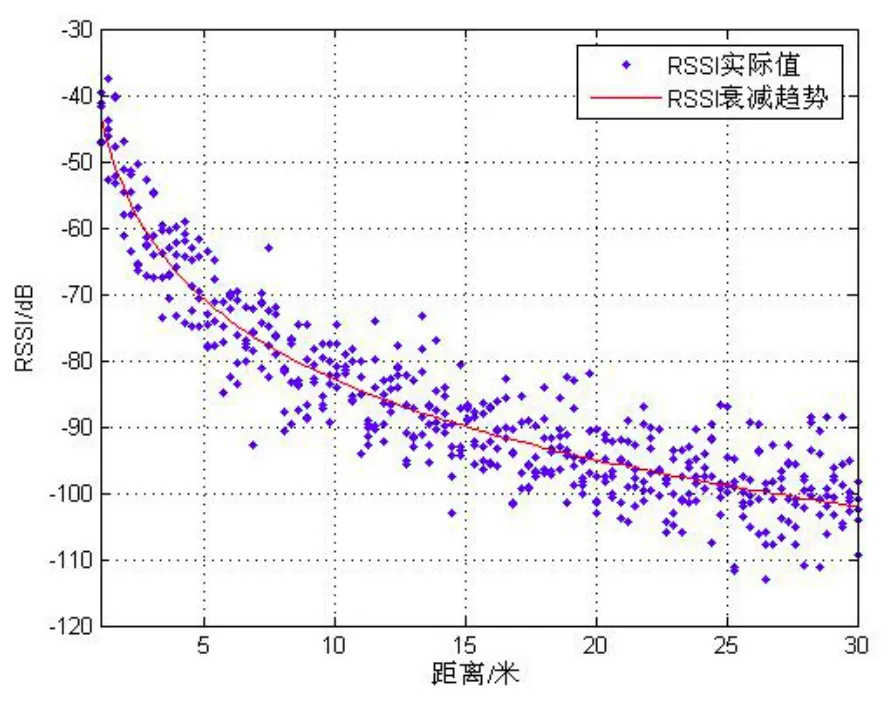
图5 无障碍环境RSSI统计图
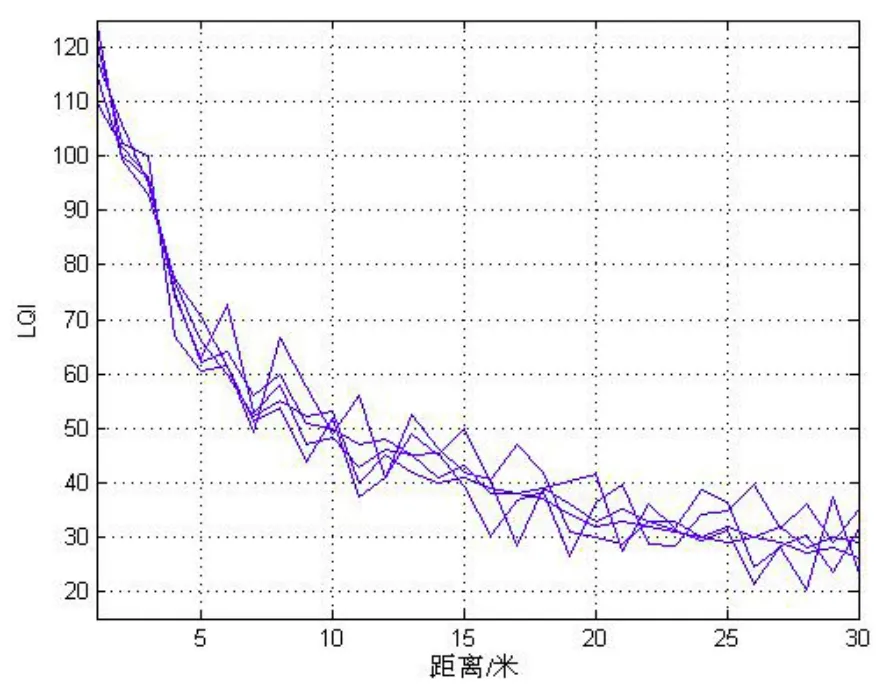
图6 无障碍环境LQI统计图
由图-5,图-6可以看出本文中的ZigBee节点在0到30米的无障碍视距环境中,随着两个节点之间距离的增大,信号强度RSSI和链路质量LQI呈下降趋势。 通过实际的测试与总结,当两个节点相距在30米以内时,通信基本可靠与快捷,当距离大于30米时,节点之间经常发生丢包或者绑定断开的情况,从而影响系统的可靠性和稳定性。
在搭建好ZigBee智能家居网络,实现Android智能终端的远程控制后,将一个ZR设备安装到智能小车上,通过智能小车的自动寻迹功能,这个ZG节点可以在其他ZR节点出现故障时修复故障节点,如果将ZC设备安装到智能小车上,则小车可以在很大的范围内收集各个终端节点的环境信息。如图7所示智能居家环境中,小车能根据黑线中设置的任务点来识别不同的房间,在到达不同房间后收集环境信息,也可以在协调器和终端节点之间建立路由,从而使终端节点可以接收到来自与协调器的控制命令,提高了网络的可靠性和稳定性,扩展了网络覆盖范围。
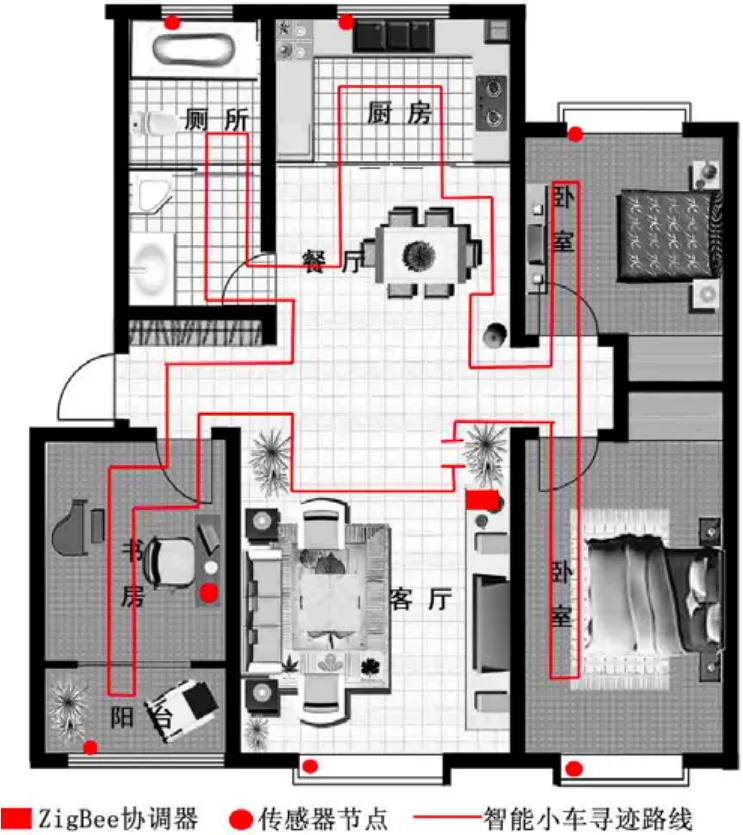
图7 智能小车循迹示意图
5 结束语
本文在智能家居系统中引入了能够自动寻迹的智能小车,这样做的优点是:一时通过智能小车自动寻迹功能,在某些节点脱离网络时,智能小车移动到此节点和协调器之间的位置,在其和协调器之间建立中继路由,提高居家网络系统的可靠性和稳定性;二是可以在某些星状网络中搭载协调器,对网络中各个节点的数据进行收集,从而在减小网络复杂度的前提下,拥有比较大的网络覆盖范围。
[1]高小平.中国智能家居的现状及发展趋势[J].低压电器, 2005,(04):18-21.
[2]易强.基于3G和Zigee的智能家居无线传感器网络系统设计与实现[D].广东:广东工业大学,2012.
[3]物联网智能家居的发展前景[EB/OL].http://www.cnjj.com/ news/show.php?itemid=6265,2013-06-03.
[4]胡媛媛,邓世建,王书婧.基于红外线传感器的智能寻迹小车设计[J].电子设计与工程,2011,19(04):141-143.
[5]Z-Stack Developer’s Guide.Texas Instruments.Document Number:SWRA176,2011.
[6]刘建国.基于DRNG的WIA-PA网络拓扑控制研究[D].重庆:西南大学,2011.
Application of Automatic Guided Vehicle to Improve Stability of Smart Home Systems
LI Ling-xiang LUO Peng
(Computer department,Hunan University of Science and Engineering,Hunan Yongzhou,425199,China)
To address the problem in which the overall performance of a smart home system might be degraded with the instability of its ZigBee network,due to that the area covered by its nodes subject to the impact from environmental factors,this paper proposes the design of a mobile ZigBee node,namely Automatic Guided Vehicle(AGV),which is able to identify different rooms in a smart home and to monitor the home environment,even to collect data from various sensor nodes in the smart home and to repair any fault nodes.Experiments show that an AGV unit in a smart home system reduces the probability of system failure and improves the coverage and stability of the system.
Automatic Guided Vehicle(AGV),ZigBee,Smart Home Syste
TP18,TP183,TB115
A
1673-2219(2014)05-0125-04
2014-02-22
湖南省教育厅科技项目(11C0599, 11C0598),永州市科技局资助项目(永科发[2012]9号
李玲香(1976-),女,湖南郴州人,讲师。研究方向为无线传感器网络、移动通信、信号与信息处理。
(责任编校:刘志壮)
猜你喜欢
医学概论(2022年3期)2022-04-24
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
少年文艺·我爱写作文(2020年11期)2020-11-23
电子制作(2019年20期)2019-12-04
电子制作(2018年1期)2018-04-04
饮食与健康·下旬刊(2017年12期)2017-12-06
少年文艺·我爱写作文(2016年9期)2016-05-14
工业设计(2016年4期)2016-05-04
工业设计(2016年10期)2016-04-16
初中生之友·中旬刊(2015年10期)2015-11-03
