
多特征融合的优化粒子滤波红外目标跟踪
2014-01-23 02:40李蔚,李辉
激光与红外 2014年1期
李 蔚,李 辉
(西北工业大学电子信息学院,陕西西安710129)
1 引言
相对于雷达、激光跟踪等技术,利用红外技术对目标跟踪有着无可比拟的优势。目前,红外目标跟踪技术广泛应用于导弹预警、卫星侦察等电子对抗领域,主要是因为红外系统在大气中的探测距离可以达到10 km,大气层之外则可达到1000 km以上的探测距离[1]。其次,红外技术作为一种被动接收信号的方式,还具有抗干扰能力强、隐藏性好等优点。红外探测技术是通过目标与背景间的辐射率差和温度差来识别目标,比可见光跟踪系统有着更强的识伪能力[1]。
粒子滤波[2]算法虽能够很好的处理红外图像中非高斯非线性问题,但重要性函数的选择、粒子的退化以及算法实时性较差等问题仍然一定程度上制约着粒子滤波的发展。有学者针对重要性函数的选择提出了似然粒子滤波[3],采用似然函数作为重要性分布,在估计过程中融入最新观测信息的同时也将多数粒子分布在高似然区域,似然函数的形状尖锐导致粒子退化问题更加严重。针对粒子退化贫化
2 权值优选的粒子滤波
根据以上问题,本文提出一种简单有效的权值优化粒子滤波方法,基本思想是从重要性函数中取N个粒子,分别计算N个粒子所对应的权值,选出其中权值较大的Np个粒子估计目标状态,具体算法步骤如下:
Step1:初始化:k=0,从重要性函数中选N个粒子组成粒子集,用表示粒子。
Step3:优选:对N个粒子按权值从大到小排序,选出前Np个粒子,将权值归一化
Step5:重采样:Neff<Nth时,对 Np个粒子进行重采样。
Step6:权值恢复:将重采样后的粒子与未参与估计的粒子状态均恢复为},返回 Step2。
优化后的算法,每个时刻只选取所有粒子中权值较大的前Np个粒子参与状态的估计,保留了权值较小的粒子,使权值较小的粒子有可能参与下一时刻的状态估计,从而使参与状态估计的粒子具有多样性,且算法的计算复杂度低,多次迭代计算后仍然能够保持粒子的多样性。在优化后的算法中,Np数值的选择是重点,Np过小会使目标状态估计不准确,Np过大则逼近标准粒子滤波算法造成样本枯竭,根据多次实验分析Np=0.56N较为合适。
3 多特征融合的红外目标模型
3.1 目标状态模型
红外目标的状态定义为 xt={x,y,vx,vy,hx,hy}。其中(x,y)为红外目标的中心,(vx,vy)分别是目标在水平和垂直方向的速度,(hx,hy)则表示图像区域的尺寸参数。目标状态方程如下所示:

其中,A为系统传递矩阵;uk-1为随机噪声。对运动目标的中心位置(x,y)采用常速运动模型,对跟踪框(hx,hy)采用一个随机扰动,T为采样周期,目标状态方程可进一步描述为:

3.2 灰度特征模型
某一量级的灰度直方图分布按式(3)计算:


其中,r为区域内的点到目标中心的距离。式(4)中的核函数g(·)表明离目标中心较近的部分更能反映目标的特征,而边缘部分往往因易受干扰包含较少的目标特征信息。
3.3 梯度特征模型
梯度特征体现了红外目标的边缘信息,能够抑制复杂背景下外界的噪声干扰。使用水平和垂直的Sobel算子提取图像中红外目标的边缘信息,红外图像f(x,y)中每个像素Pij对应的梯度幅值和梯度方向值分别为:

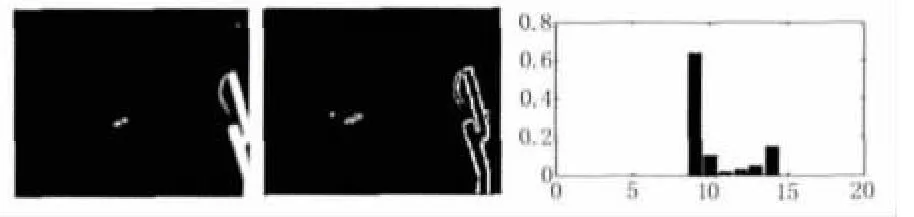
图1 梯度直方图模型
4 多特征自适应融合策略
4.1 多特征融合
红外目标灰度特征和梯度特征的Bhattacharyya相似系数用式(8)表示,其中q(u)和q(k)分别表示目标模板的灰度特征和梯度特征,p(u)和p(k)分别表示候选观测模板的灰度特征和梯度特征。

若灰度模型的置信度为Ly,梯度模型的置信度为Ld,则置信度的计算公式为:
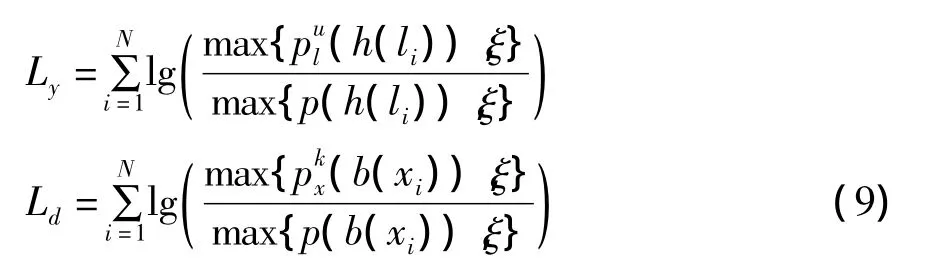
式(9)中可以通过ξ来调节置信区间,式中p(h(li))和p(b(xi))分别为灰度和梯度模型的背景概率密度函数,本文用跟踪窗外的10个像素区域为背景区域。置信度是以模型和背景的区分度为参考,目标与背景的区分度越高,则该模型置信度越高,对应的相似度所占比重就越大。对两种模型的置信度进行归一化处理后得到:

用归一化置信度将灰度模型和梯度模型的相似度融合,得到综合Bhattacharyya系数:

ρ(p,q)越大,说明目标模板和候选区域的分布越相似。则观测模型可以由式(12)得到:

4.2 自适应模板更新
当前候选区域与目标模板的相似程度由ρ(p,q)确定,更新模板时,利用灰度和梯度模型相似系数并结合综合相似度,利用置信度进行适时的模版更新,判定标准为:

式中,ρT为阈值,本文中ρT取0.86。当满足式(13)中的任一条件时,进行模型更新。在模型更新时分别对灰度和梯度特征相似度进行判断,综合考虑了模型所含的信息量,使模板的更新不受某一特征突变的影响,不仅增加了模型的抗干扰能力还能够避免频繁更换模型带来的累积误差。这种模板更新准则还能很好的应用于红外目标被物体遮挡的情况,当连续2帧图像序列跟踪结果的巴氏系数均小于阈值,则目标可能存在持续遮挡,这时可融合均值漂移算法,增加Mean shift的带宽,继续跟踪红外目标。若连续4帧图像序列跟踪结果的巴氏系数均小于阈值,则可认定目标丢失,应重新对红外图像进行检测,得到目标新的位置,并对其继续跟踪。
4.3 红外目标跟踪
优化后的红外目标跟踪算法具体步骤如下:
步骤一:初始化
1.手动选择参考目标,确定目标位置,建立目标灰度模板和梯度模板;
2. 每个粒子初始状态为 x0={x,y,vx,vy,hx,hy},根据先验密度概率生成粒子集,并设粒子的初始权值为1/N。
步骤二:预测
步骤三:观测值计算
建立观测目标模型,计算目标模板和观测模板的巴氏系数,归一化权值。
步骤四:权值优选的重采样
1.计算重采样系数Neff,设定阈值Nth=2N/3,若Neff>Nth,则不进行重采样;
2.若Neff≤Nth,则根据本文第2节内容,对粒子进行权值优选的重采样算法。
步骤五:根据权值较大的前Np个粒子,计算样本的均值
步骤六:判断遮挡
根据式(13)中三个条件判断巴氏系数是否小于阈值,若满足式(13)中任一条件则更换目标观测模板,若更换模板后连续4帧巴氏系数均小于阈值则目标可能被遮挡,应增大Mean shift带宽,继续进行目标匹配搜索。
步骤七:k=k+1,返回步骤二。
5 仿真实验分析
实验平台为 Core-i3 CPU,计算机主频为2.50GHz,内存2.00GB的PC机,采用MATLAB 7.9软件实现。
5.1 WSPF算法性能仿真
实验一对优化后的粒子滤波器性能进行了仿真。实验中选取权值较大的前Np=0.56 N个粒子参与目标状态估计。表1显示了在过程噪声为10,量测噪声为1,不同粒子数下标准算法和优化后算法的滤波算法仿真的相关数据,程序运行10次得到平均有效粒子数、均方误差值以及两种算法的运行时间。表1的相关数据表明优化后的算法中有效粒子数明显增加,均方误差明显减小,虽然优化后算法的运行时间有所增加,但相对来说在合理范围内。图2和图3分别截取了在粒子数为100的情况下的状态估计图和两种算法的估计误差,实验表明优化后算法的估计值能更好的接近真实值,误差基本稳定在较低的范围内,有着更为稳定的跟踪性能。均方根误差用于衡量真实值和估计值之间误差的大小,其计算公式为:
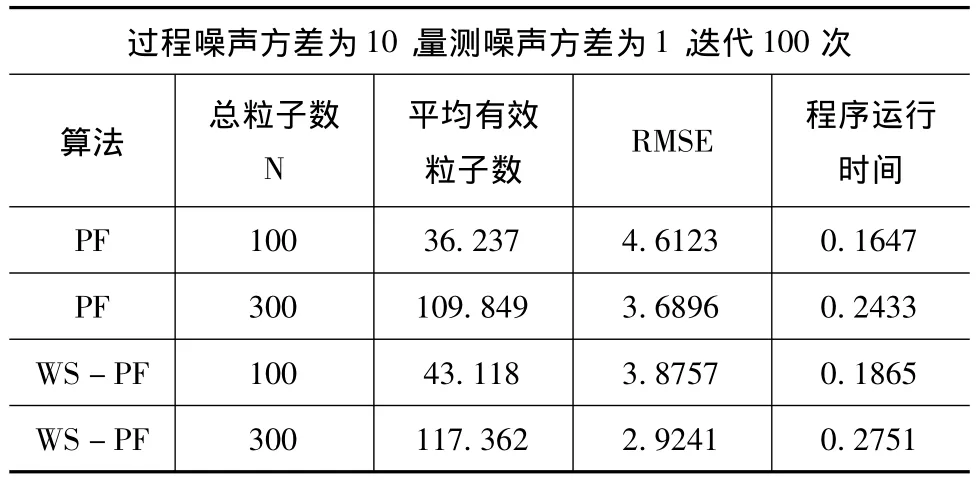
表1 优化后算法的仿真数据

5.2 红外目标跟踪
第一组实验对象是实时拍摄的有遮挡情况下红外飞机目标图像序列。此红外摄像机识别距离2.8 km,探测距离8 km,视场大小21.74×17.46,帧频50Hz。目标的初始位置手动给出,跟踪区域用白色矩形框标示,每帧图像像素为320×240,共100帧图像。红外目标灰度分布量化为8个等级,梯度分布量化为8个等级,采样粒子总数为N=100,其中Np=0.56 N。视频序列中目标从20帧到30帧之间遇到遮挡,从图4(a)中可以看出第24帧时,飞机明显被遮挡物遮挡,传统的粒子滤波算法在多次迭代后粒子丧失多样性且目标模型不准确,目标被遮挡后不能适时更新模板,从而导致最终丢失目标。图4(b)中是采用粒子滤波与均值漂移相结合的改进算法,在遇到遮挡后跟踪性能明显下降,在几步迭代之后目标丢失。图4(c)中的仿真结果利用本文算法,在第28帧后仍然能够对目标进行有效精确的跟踪。

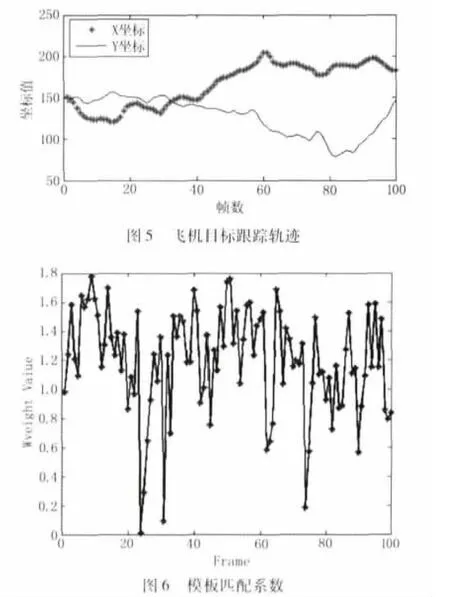
图4 两种算法跟踪结果对比(从左到右图像分别为5,24,28,35 帧)
图5所示为飞机运动的跟踪轨迹图。在跟踪100帧图像的过程中,传统算法运算时间为9.671286 s,由于多特征融合的计算较为耗时,使得本文算法运行时间大大增加为48.116217 s。图6为跟踪过程中观测模板和当前目标模板的匹配系数,在飞机遇到遮挡物后的20到30帧内,匹配系数迅速减小到0.2以下,在第74帧时目标自身有闪烁。通过实验验证,本文算法在遇到遮挡和闪烁点时,能够及时调整模板置信度,增大带宽进行匹配搜索,及时准确的跟踪红外目标,算法具有较高的鲁棒性。
第二组实验是针对复杂背景下人体红外目标的跟踪仿真结果。此红外摄像机识别距离为600 m,探测距离为1.7 km,视场大小21.74×17.46,帧频50 Hz。实验时,目标的初始位置手动给出,跟踪区域用白色矩形框标示,每帧图像尺寸为320×240,共100帧图像。红外目标灰度分布描述的灰度量化为8个等级,梯度分布量化为8个等级,采样粒子数为N=100,Np=0.56 N。传统粒子滤波算法采用单一的灰度特征对目标建模且粒子多次迭代后的退化现象导致跟踪程序无法精确地分辨出红外目标。采用WS-PF算法后粒子贫化得到抑制,同时融合多特征建立目标的观测模型使目标跟踪的精度和稳定性提高,从而在复杂背景下仍然能够鲁棒地跟踪目标,如图7所示。

图7 本文算法对复杂背景下的人体跟踪(从左到右图像分别为2,28,57,83 帧)
6 结束语
优化后的WS-PF算法选取权值较大的优良粒子参与跟踪结果的估计,使权值较小的粒子有可能参与到下一状态的目标状态估计,增加参与状态估计粒子的多样性,抑制粒子退化和贫化现象,使跟踪性能显著提高。同时,本文针对红外目标遮挡、目标背景干扰等实际中遇到的问题,融合红外目标的灰度特征和梯度特征建立红外目标的观测模型,并引入置信度实时调整每个特征对跟踪结果的影响。根据不同的环境因素适时切换融合策略,实现了对复杂遮挡等场景中红外目标的跟踪,提高了红外目标跟踪的鲁棒性。经多种情况下的仿真验证,本文算法不仅能稳定实时的跟踪红外目标,还有能力处理复杂遮挡背景下的红外目标跟踪,可广泛应用于导弹制导、卫星侦察等技术领域。
[1] Peng Zhenming,Yong Yang,Yang Xianming.Optical image processing and applications[M].Chengdu:University of Electronic Science and Technology Press,2010:218 -219.(in Chinese)彭真明,雍杨,杨先明.光电图像处理及应用[M].成都:电子科技大学出版社,2008:218-219.
[2] Doucet A,Gordon N,Krishnamurthy V.Particle filters for state estimation of jump markov linear systems[J].IEEE Trans.Signal Processing,2001,49(3):613 -624.
[3] Jiang Wei,Yi Guo-xing,Zeng Qingshuang.Likelihood particle filter based on support vector machines resampling[J].Control and Decision,2011,26(2):243 - 247.(in Chinese)蒋蔚,伊国兴,曾庆双.一种基于SVM重采样的似然粒子滤波算法[J].控制与决策,2011,26(2):243 -247.
[4] Qi Cheng.An efficient two-stage sampling method in particle filter[J].IEEE Trans on Aerospace and Electronic Systems,2012,48(3):2666 -2672.
[5] Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Trans on Pattern Analysis and Machine Intelligence,2003,25(5):564 -575.
[6] Liu Qing,Tang Lin-bo.Infrared target tracking based on adaptive multiple features fusion and mean shift[J].Jounal of Electronics & Information Technology,2012,34(5):1137 -1141.(in Chinese)刘晴,唐林波.基于自适应多特征融合的均值迁移红外目标跟[J].电子与信息学报,2012,34(5):1137-1141.
[7] Ji Xuefeng.Research on method of infrared target tracking based on particle filter[D].Xi'an:Xidian University,2011.(in Chinese)姬雪峰.基于粒子滤波的红外目标跟踪方法研究[D].西安:西安电子科技大学,2011.
[8] Rong Huaiyang,Zhang Yong.Small infrared target tracking algorithm based on frequency region feature[J].Laser& Infrared,2012,42(8):959 -964.(in Chinese)戎怀阳,张涌.基于频域特征提取的红外小目标跟踪算法[J].激光与红外,2012,42(8):959 -964.
[9] Xu Rongping,Yang Lei.Small target tracking approach combined the merits of two tracking frameworks under infrared complex background[J].J.Infrared Millim.Waves,2008,27(5):354 -360.(in Chinese)徐蓉萍,杨磊.红外复杂背景中一种融合两类跟踪框架优点的小目标跟踪算法[J].红外与毫米波学报,2008,27(5):354 -360.
[10] Zhang Hui,Zhao Baojun.Infrared object tracking based on adaptive multi-features integration[J].Acta Optica Sinica.2010,30(5):1291 -1296.(in Chinese)张辉,赵保军.基于自适应多特征整合的红外目标跟踪[J].光学学报,2010,30(5):1291 -1296.
[11] Yang Dongdong,Chang Danhua.Improvement and realization of the moving object detection and tracking[J].Laser& Infrared,2010,40(2):205 -209.(in Chinese)杨冬冬,常丹华.运动目标检测与跟踪算法的改进与实现[J].激光与红外,2010,40(2):205 -209.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2021年6期)2021-12-21
高技术通讯(2021年3期)2021-06-09
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
应用数学(2020年2期)2020-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
自动化学报(2017年5期)2017-05-14
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
