
燃料电池Buck变换器的动态演化控制仿真
2014-01-22 05:26全书海谢长君
机电工程 2014年11期
黄 宬,黄 亮*,卢 叶,全书海,谢长君
(1.武汉理工大学自动化学院,湖北武汉430070;2.北京惠通盛电力工程有限责任公司,北京100045)
0 引言
与传统发电系统相比,燃料电池具有工作效率高、对环境污染小以及可扩展使用等特点,被视为发展和应用前景最好的新型能源之一,现已广泛应用于便携式、分布式发电以及备用电源等领域[1]。但是受内部电化学反应的影响,燃料电池的输出动态响应缓慢,无过载能力,需要DC/DC 变换器作为其输出接口单元来改善其输出特性[2]。
动态演化控制(DEC),是基于反馈控制理念,强制输出的偏差按照指定的路径(称这条路径为“演化路径”)趋向于零。与其他先进的控制方法相比,该方法无需对变换器模型进行任何简化或线性化处理,并充分利用了系统的非线性和时变性[3]。研究者只要知道变换器输出响应的公式,确定了演化路径,就可以求出动态演化控制方程,并根据该方程对变换器进行控制。
由于Buck、Boost 电路应用广泛、控制简单,关于Buck、Boost 变换器的DEC 控制已经实验成功,并应用到燃料电池动力汽车(Fuel Cell Electric Vehicles,ECEV)供电系统中,实现了Buck/Boost 的双向控制[4-6]。交错并联技术与同步整流技术的使用,进一步扩大了Buck、Boost 电路的应用范围。
结合上述两种技术,本研究以两相交错并联同步Buck 电路为实验平台,设计该变换器的DEC 控制器。在Matlab-Simulink 仿真环境下,本研究针对两相交错并联同步Buck 变换器的DEC 控制性能通过仿真进行测试。
1 燃料电池
燃料电池是将燃料中的化学能转换为电能输出。只要燃料的供应不断,那么燃料电池就能不断地输出电能。可是,燃料电池的输出极易受到负载的影响,负载所需要的电流越大,燃料电池的输出电压就会被拉得越低[7]。
实际应用的燃料电池其实是由许多单体燃料电池串并联组成的燃料电池堆,而燃料电池堆还可以继续串并联以获得更高的输出功率和输出电压。燃料电池发电系统如图1所示。图1 中的二极管DFC与吸收电容CDC用来防止反向电流对燃料电池造成损坏。基于这样一种应用情景以及燃料电池的输出特性,本研究以两相交错并联同步Buck 变换器作为燃料电池的输出接口电路,在此基础上应用动态演化控制,实现DC/DC 变换器对燃料电池输出的管控。

图1 燃料电池应用情境
2 Buck 变换器
两相交错并联同步Buck 变换器拓扑如图2所示。它是由两路基本同步Buck 变换器并联而成,这两路同步Buck 变换器的元件参数和开关频率都是相同的,只是控制相位上相差π 个电角度,即半个周期。每条支路中的上、下管处于互补工作的状态,这样减小了因使用整流二极管而造成的整流损耗,大大提高了变换器的工作效率。整个Buck 变换器的输出电流为各支路Buck 电路输出电流之和,输出电流纹波在开关频率没有改变的情况下频率提高了两倍,从而减小了纹波峰-峰值。同时,交错并联技术也大大减小输出滤波器的尺寸,提高变换器动态响应速度,降低变换器的开关损耗[8-9]。
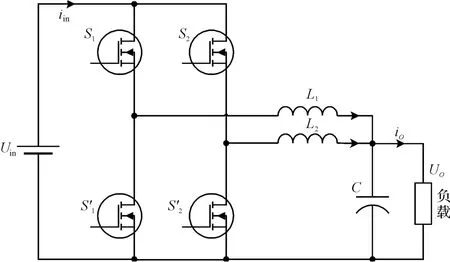
图2 两相交错并联同步Buck 变换器
3 动态演化控制设计
DEC 控制显著的特点就是会强制让系统的动态特性按照指定的演化路径进行演化。因此,DEC 设计的第一步是要确定演化路径,以确保系统的偏差按照特定的方式和速率减小至零。演化路径主要由分段线性曲线和指数曲线两种,这里选用指数函数的演化路径,该路径如图3所示。
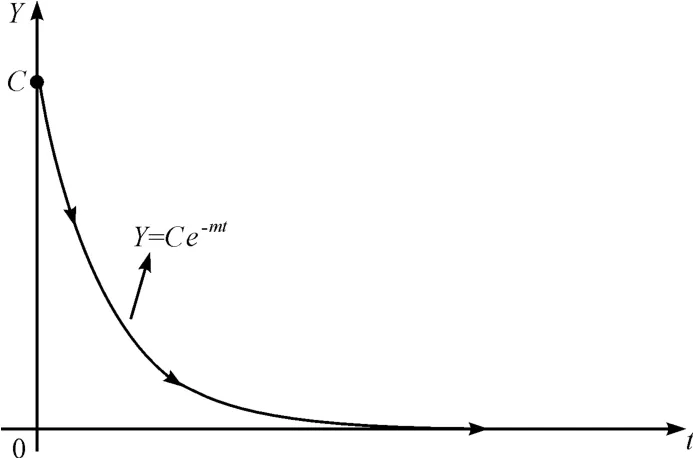
图3 指数演化路径
该路径的曲线表达式为:

式中:Y—系统的动态特征参数;C—Y 的初始值;m—一设计参数,m >0;该值的大小将会影响演化速度的快慢。
根据式(1)对Y 进行微分整理,则DEC 控制器的动态演化方程可以写成:

为确保系统的动态特性能够按照演化路径减小至零,必须要获取系统的控制规律。DC/DC 变换器的控制规律对应于变换器的占空比公式α(vo,vi,iL),占空比α 是vo,vi和iL的函数。该公式可通过对变换器系统的动态方程式进行分解并代入上述的动态演化方程(2)得到。
4 Buck 变换器控制分析
两相交错并联Buck 变换器是两个Buck 变换器并联工作。若将输出电压作为控制的目标,则对占空比α 的分析可以基于一个基本的同步Buck 变换器上完成[10]。
根据基尔霍夫电压定律,可以得到同步Buck 变换器的动态方程式:

式中:L—电感感值,vi(t)—输入电压,iL(t)—电感电流,vo(t)—输出电压,α(t)—占空比。
对该式进行整理,就可以得到输出电压的表达公式:

要推导出占空比公式,需先定义状态误差函数(Y)的性质。在电力电子领域中,可选择误差电压或误差电流方程作为动态演化方程中的Y。本研究假定Y 是关于输出电压误差的线性函数,表示为:

式中:k—一正比例系数;verr—误差电压;且:

式中:Vref—输出电压的基准目标值。
将式(5)代入式(2),有:

将式(3)和式(7)直接相加后整理得到占空比α公式为:

这也就是Buck 变换器的动态演化控制律,依据该公式对开关管进行控制,就能实现两相交错并联同步Buck 电路的DEC 控制。由于式(8)满足动态演化方程式(2),DEC 控制会强制输出误差电压(Y)按照式(1)进行演化,并以m 决定的减小速率一直减小到0,达到稳态。
与其他控制策略不同,在DEC 控制的整个推导过程中,本研究没有对系统模型做任何线性化或简化处理,因此DEC 控制可以在系统的整个非线性范围内工作。
把式(6)代入替换掉vo,再次整理式(8),得:

可以看出式(9)是由4 个独立的部分组成。第一部分可称之为反馈项Vref/vi,它是基于前一时刻采样值直接计算得来。第二和第三项分别是输出电压扰动的比例项和衍生(微分)项。最后一项是电感电流的衍生(微分)项。
通过该公式可以清楚地看到,系统的输入电压、输出电压和电感电流都参与了控制过程。这种特性使得DEC 控制可以补偿任何输入、输出端的扰动,以及电感电流的变化,因而交错并联同步Buck 变换器会具有更好的动态特性。
5 Matlab-Simulink 仿真结果
5.1 系统模型构建
Matlab-Simulink 仿真环境下有一个专门的模块元件库SimPowerSystem,它提供了电力电子仿真所需要的元件模型。用户可根据使用该元件库下的元件模块按照实际设计的电路进行建模,构造仿真模型[11]。本研究在Simulink 仿真平台上具体构建了DEC 控制的两相交错并联同步Buck 变换器仿真模型,该模型如图4所示,相关模型参数如表1所示。
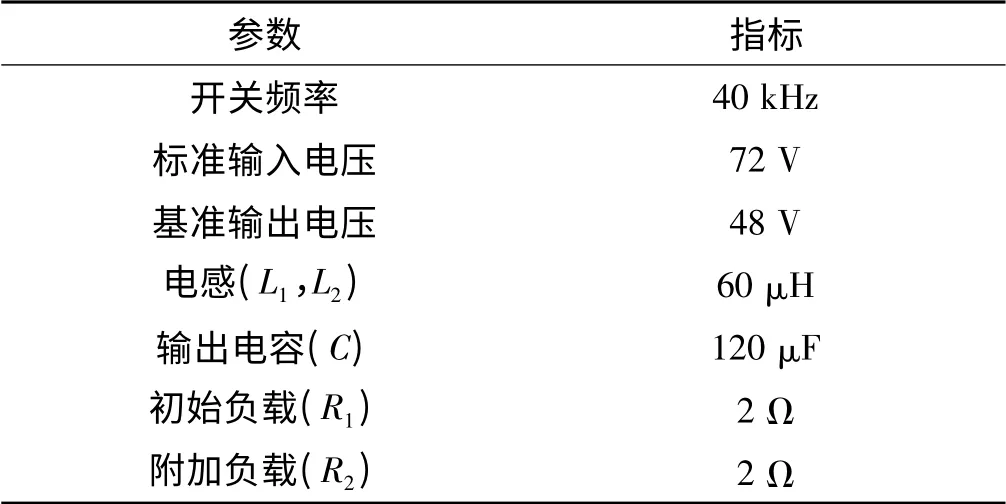
表1 仿真模型参数
由于交错并联同步Buck 变换器需要两路PWM信号来驱动两组开关,那就需要从单一的PWM 发生器中生成两组互补交错的PWM 信号。PWM 信号产生的方法如图5所示。当控制信号Vst大于V1时产生第一路上管的PWM 信号,当控制信号Vst小于V2时产生第二路上管的PWM 信号。相应下管的PWM 控制信号可通过上管的PWM 信号取反获得。
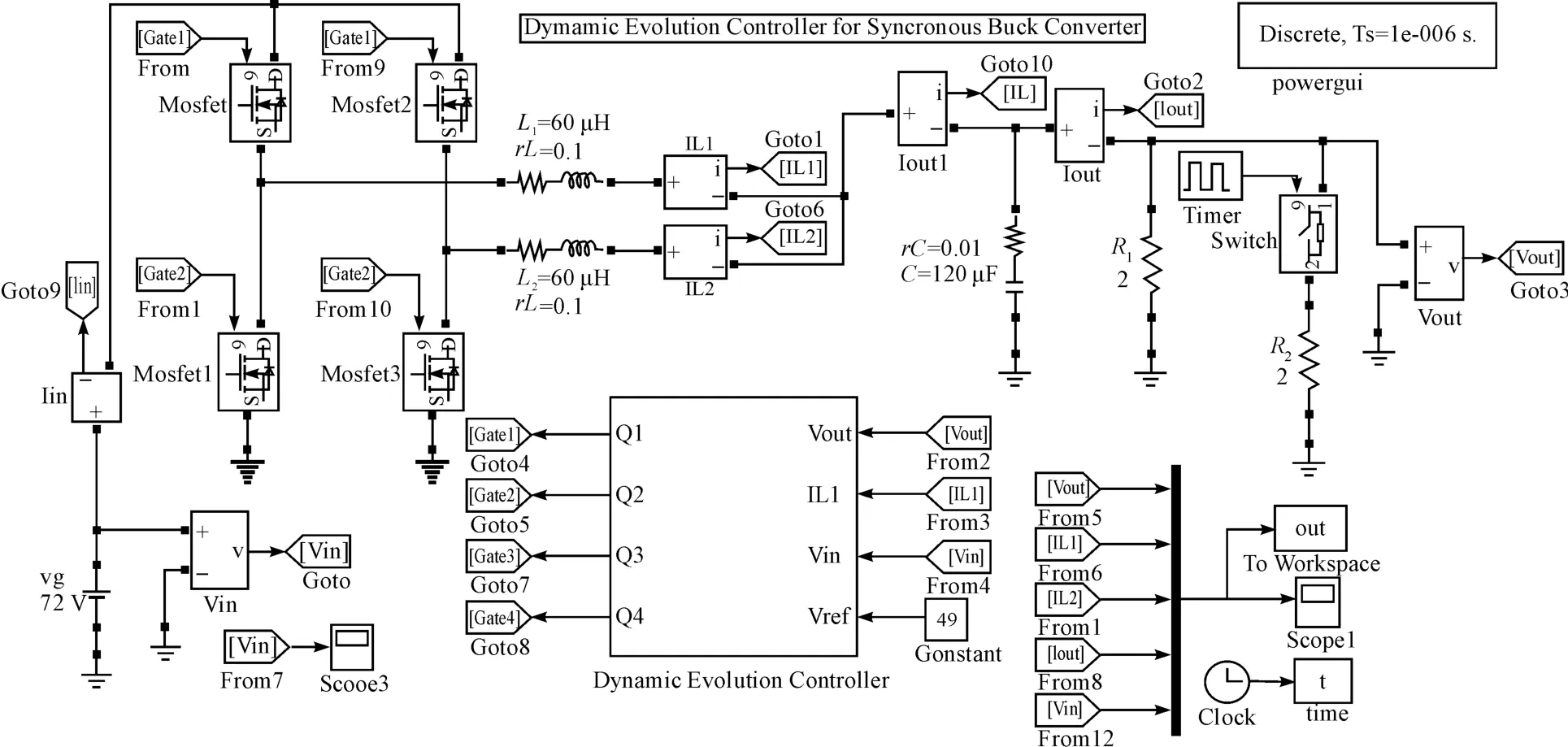
图4 两相交错并联同步Buck 变换器仿真模型
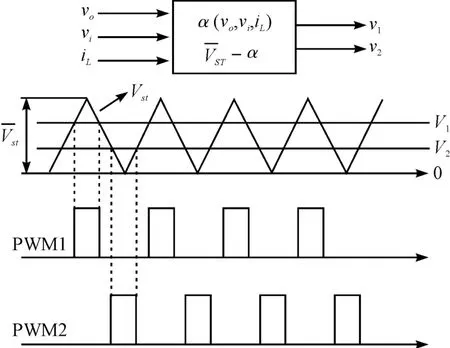
图5 PWM 发生器
理想的电平控制信号值可按占空比式(8)或式(9)计算得到。控制信号V1和V2的值通过式(10,11)给出,PWM 信号则由式(12)产生:
5.2 控制器性能测试
负载突变是电力电子应用中经常遇到的典型问题,在该领域中要求电力供应能对负载突变做出快速响应并进行补偿。因而设计了变换器系统分别在恒定输入电压和带交流纹波输入电压下,负载阶跃变化的DEC 仿真实验。参考输出电压设定为72 V,负载每20 ms在1 Ω~2 Ω 之间发生突变。设定的控制器参数k=1,m=22 000。
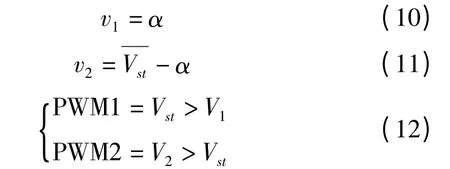
5.2.1 恒定输入负载突变情况下的仿真
在恒定的输入电压下,负载发生突变的仿真结果如图6所示。输入恒定设置为72 V,每20 ms 发生一次负载突变。由图6 可以看出,相应的负载电流会在约24 A~48 A 这两个值间变动。在负载突加的瞬间,输出电压会有约4 V 左右的下降,但是通过动态演化的闭环控制,系统在0.2 ms 内就能补偿使输出维持在48 V。根据这个仿真结果可以说,在72 V 基准稳态电压输入下,控制器完成了控制变换器输出电压的任务。
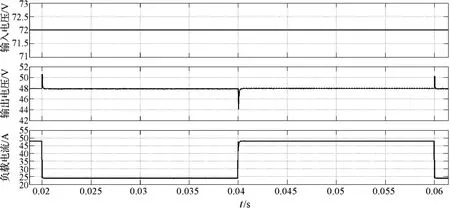
图6 恒定输入负载突变下的仿真波形
5.2.2 变动输入负载突变情况下的仿真
本研究在72 V 恒定直流电压上叠加一个100 Hz,5 V 的交流电压纹波形图(如图7所示)再次进行仿真。同样每隔20 ms 发生一次负载突变(突增或突减)。输出的负载电流仍会在24 A~48 A 之间变化。在负载突加的瞬间,输出电压也会出现约4 V 的下降,但系统能在0.2 ms 内完全消除该压降。所得到的结果与上一小节所示结果是一样的,这就表明了动态演化控制器完全消除了输入电压纹波对输出的干扰。显然,上述控制器具备良好的抗干扰性能和快速响应能力,其表现令人满意。
5.3 DEC 与PI 控制性能比较
当前,PI 控制在电力电子中运用的最为广泛。为了进一步说明DEC 的优越性,本研究设计了一个基于PI 控制的交错并联同步Buck 变换器的仿真实验与上述DEC 仿真进行对比。参数设定与表1 完全一致,经过试凑,本研究设定PI 控制器的比例系数P=1.2,积分系数I=120。
5.3.1 负载调节性能
输入电压为72 V,每隔20 ms 负载变化一次,仿真波形如图8所示。
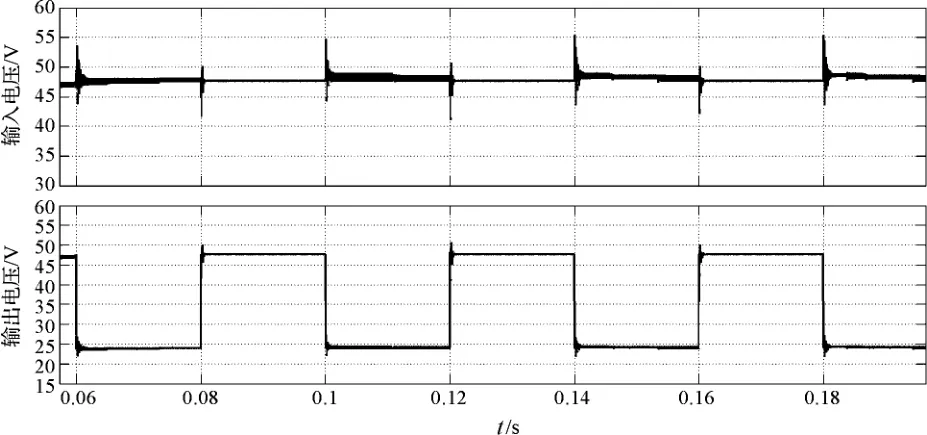
图8 恒定输入负载突变下的PI 控制仿真波形
与负载变化相一致,相应的负载电流在24 A~48 A这两个值间变动。在负载突加的瞬间,输出电压会有约5 V 左右的下降,基于PI 控制的系统需1 ms 才能使输出重新维持在48 V,并且稳定后的输出电压一直会有500 mV 的上下波动。跟动态演化控制相比,在恒定输入电压下,显然动态演化控制的动态响应和输出电能质量都比PI 控制的高。
5.3.2 输入调节性能
恒定的72 V 输入叠加一个100 Hz,5 V 的交流电压纹波,负载条件不变,仿真得到的波形如图9所示。

图9 变化输入负载突变下的PI 控制仿真波形
跟动态演化控制相比,此时PI 控制对于来自输入端的干扰不能进行补偿。虽然负载电流仍然在24 A~48 A 两个大约值之间突变,但明显不够稳定。在负载突加的瞬间,输出电压会有将近6 V 的下降,需要2 ms才能完全消除该压降。该波形结果说明在输入有干扰影响时,PI 控制器的控制性能将大打折扣,从而进一步说明了动态演化控制器的优越性。
6 结束语
本研究详细论述了两相交错并联同步Buck 变换器的DEC 设计思路以及DEC 控制的实现。通过在两相交错并联同步Buck 变换器的Simulink 仿真模型上与传统的PI 控制进行仿真比较,DEC 控制在变换器系统输入/输出有干扰的情况下,都具有很好的抗干扰性能和快速的响应能力。无论从设计繁简程度和控制性能来说,动态演化控制都优于传统的PI 控制。
与PI 控制相比,DEC 控制器的优点有:
(1)动态演化控制只需对一个参数m 进行调整,而PI 控制需要调整比例因子和积分因子两个参数,而这两个参数又会相互影响,通常只能试凑和实验得到大致的PI 值。
(2)对输入和输出电压的变化具有很好的动态响应。
(3)响应速度快,鲁棒性好。
但是DEC 有一个缺陷,从式(8,9)可以看出,占空比的计算有一个除法项,这使得DEC 控制很难用模拟电路的形式实现。
[1]陈敬生,王兴杰.燃料电池在通信行业大有可为[J].华为技术,2011,12(58):37-38.
[2]古云蛟,朱新坚,邵 孟,等.通讯基站大功率PEMFC 备用电源DC/DC 变换器的设计与应用[J].微型电脑应用,2013,29(4):1-4.
[3]SAMOSIR A S,YATIM A M.Dynamic evolution control for synchronous buck DC-DC converter:theory,model and simulation[J].Simulation Modelling Practice and Theory,2010(18):663-676.
[4]SAMOSIR A S,YATIM A H.Implementation of dynamic evolution control of bidirectional DC-DC converter for interfacing ultracapacitor energy storage to fuel-cell system[J].IEEE Transactions on Industrial Electronics,2010,57(10):3468-3473.
[5]SAMOSIR A S,YATIM A H M.Dynamic Evolution Control of Bidirectional DC-DC Converter for Interfacing Ultracapacitor Energy Storage to Fuel Cell Electric Vehicle System[C]//Power Engineering Conference,2008.AUPEC '08.Australasian Universities:[s.n.],2008:1-6.
[6]SAMOSIR A S,SUTIKNO T,YATIM H M Y.Dynamic evolution control for fuel cell DC-DC converter[J].Telkomnika,2011,9(1):183-190.
[7]YU X,STARKE M R,TOLBERT L M,et al.Fuel cell power conditioning for electric power applications:a summary[J].Electric Power Applications,IET,2007,1(5):643-656.
[8]赖联有.两相交错并联同步Buck 变换器的设计与仿真[J].电源技术,2012,136(8):1162-1212.
[9]李 冬,张相军.交错并联Buck 变换器设计及仿真分析[J].电气传动,2013(S1):79-81.
[10]SAMOSIR A S,ANWARI M,YATIM A H M.Dynamic Evolution Control of Interleaved Boost DC-DC Converter for Fuel Cell Application[C]//IPEC,2010 Conference Proceedings.Chennai:[s.n.],2010:869-874.
[11]朱春华,王建国.Matlab/Simulink 在DC-DC 变换器仿真中的应用[J].现代电子技术,2008(18):23-25.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
小资CHIC!ELEGANCE(2019年40期)2019-12-10
车迷(2017年12期)2018-01-18
电子制作(2017年10期)2017-04-18
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
电子设计工程(2015年16期)2015-02-27
汽车与新动力(2014年4期)2014-02-27
