基于卡尔曼滤波的机动与非机动目标的定位跟踪
2014-01-21 00:51:54张正华
电子设计工程 2014年20期
徐 杨,张正华
(扬州大学 信息工程学院,江苏 扬州 225000)
在我国成为世界第二大经济体的同时,我国居民对交通的需求也越来越高,然而我国目前的交通状况却不容乐观:目前我国道路交通事故死亡人数仍居世界第一位;我国道路交通事故的车辆事故率约为发达国家的十几倍[1];因此,智能交通系统的实施势在必行。
所谓智能交通是指一个基于现代电子信息技术面向交通运输的服务系统。它的突出特点是以信息的收集、处理、发布、交换、分析、利用为主线,为交通参与者提供多样性的服务。而目标跟踪是智能交通系统的核心,通过对机动车辆的实时监测和跟踪,不仅可以得到单个车辆的速度,还可以得到车辆的流量和密度等,因此可以实现对交通事故或者车辆故障等突发状况的提前预判,在很大程度上避免交通事故的发生。
实现智能交通的前提是对运动的车辆进行跟踪。关于卡尔曼滤波的一个典型应用就是从一组对物体位置的观察序列(可能有偏差)推算出目标的运动状态,即物体位置的坐标及速度,这一组序列从可行性的角度来说,应该是有限的并且有噪声包含其中[2-3]。在我们身边的很多工程应用(如雷达、传感器监控)中都很容易发现它的身影。卡尔曼滤波应用广泛且功能强大的原因在于,它不仅可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。一般情况下,我们可以利用卡尔曼滤波对复杂运动情况下的目标进行实时精确的跟踪。
1 卡尔曼滤波在目标跟踪中的应用介绍
在理论上,经典的维纳滤波理论和方法有不可避免的局限性,而卡尔曼的滤波的优点之一,就是突破了维纳滤波的这种局限性,因为其在引入了系统的状态变量和状态空间的基础上,进一步提出了状态空间方法(基于时域的),这一方法的提出不仅代表了现代控制理论的开端,而且还延伸出了一套递推滤波算法,这套算法,不仅容易在计算机上实时实现,而且适合多变量的处理,是适用于线性系统的最优估计理论[4-5]。Kalman滤波基本公式:


我们可以得知,卡尔曼滤波算法在对运动目标的动态跟踪方法中,能够实时地处理数据,提高了初始阶段的跟踪精度。作为一个对单个目标的跟踪算法,它是多目标跟踪算法,信息融合与跟踪的基础,也是实现智能交通的第一步[6-7]。
2 仿真分析
2.1 非机动目标
1)情景假设
假设有一二坐标雷达对一平面上运动的目标进行观测,目标在 t=0~600 s沿 x轴作恒速直线运动,运动速度为15 m/s,目标的起始点为(-10 000 m,2 000 m)。雷达扫描周期T=2 s,x和y独立地进行观测,观测噪声标准差均为100 m。要求滤波误差标准差的方差压缩系数为0.5。
2)结果分析
我们已经把卡尔曼滤波的算法叙述的很清楚,由5个公式就很容易实现卡尔曼滤波算法。在计算机仿真中,我们采用Matlab编写程序,利用蒙特卡洛的方法对跟踪滤波器进行仿真分析,次数为1 000次。以下给出仿真图和结果分析。
图1是目标的真实轨迹和测量轨迹,测量轨迹是真实轨迹数据添加方差和均值固定的随机测量噪声得到的,目标沿y=2 000 m做匀速直线运动。给出的测量轨迹用于滤波后与滤波轨迹作比较分析。从图中可以看出,测量轨迹围绕真实轨迹作上下浮动。

图1 目标的真实轨迹与量测轨迹Fig.1 The real trajectory and measured trajectory
图2 是1 000次滤波数据曲线。从图中可以看出,滤波开始时误差较大,但是随着时间的推移,滤波误差降低,估计值逐步逼近真实轨迹。
图3是y方向滤波估计误差均值及误差标准差。滤波开始时误差较大,随着采样点的增加,误差逐渐减小,误差的标准差也具有同样的特性。达到了滤波误差标准差的方差压缩系数为0.5的要求。

图2 1 000次滤波数据曲线Fig.2 The 1 000 filtering data curve

图3 y方向滤波估计误差均值及误差标准差Fig.3 The average value of y direction filtering estimation error and the standard deviation
图4 是x方向滤波估计误差均值及误差标准差。与y方向的估计误差均值相比,x方向的估计误差均值波动较大,这是由于在x方向上有速度分量的缘故,同时其方向上滤波估计误差也有一定波动。也达到了其压缩系数为0.5的要求。

图4 x方向滤波估计误差均值及误差标准差Fig.4 The average value of x direction filtering estimation error and the standard deviation
图5 是单次滤波速度估计与1 000次滤波速度估计。单次滤波速度与实际值有差距,但是1 000次滤波取均值后速度滤波已经于实际值,但是滤波开始时仍有很大偏差,这随着采样点的增加,误差逐渐减小。
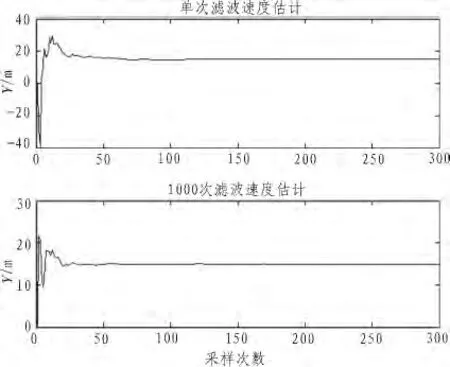
图5 单次滤波速度估计与1 000次滤波速度估计Fig.5 The estimation of single filtering speed and 1 000 filtering speed
2.2 机动目标
1)情景假设
假定有一二座标雷达对一平面上运动的目标进行观测,目标在0-400 s沿着y轴作恒速直线运动,运动速度为-15 m/s,目标的起始点为(2 000 m,10 000 m),在 t=400~600 s向轴x方向做的慢转弯,加速度为0.075 m/s,完成慢转弯后加速度将降为零,从t=610 s开始做90°的快转弯,加速度为0.3 m/s,在660 s结束转弯,加速度降至零。雷达扫描周期T=2 s,X和Y独立地进行观测,观测噪声的标准差均为100 m。
2)结果分析
从图6可以看出,对应的目标有2次加速和2次匀速运动,符合情景假设中目标真实轨迹变化。

图6 真实轨迹与量测轨迹对比Fig.6 The comparison between real trajectory and measured trajectory
从图7可以看出,机动的卡尔曼滤波对观测轨迹有很好的滤波效果,但在模型出现机动的时候,会出现大的误差。
从图8可以看出,在一定的参数范围内,提高滤波次数,可以更直观的看清楚滤波后的轨迹。
3 结束语
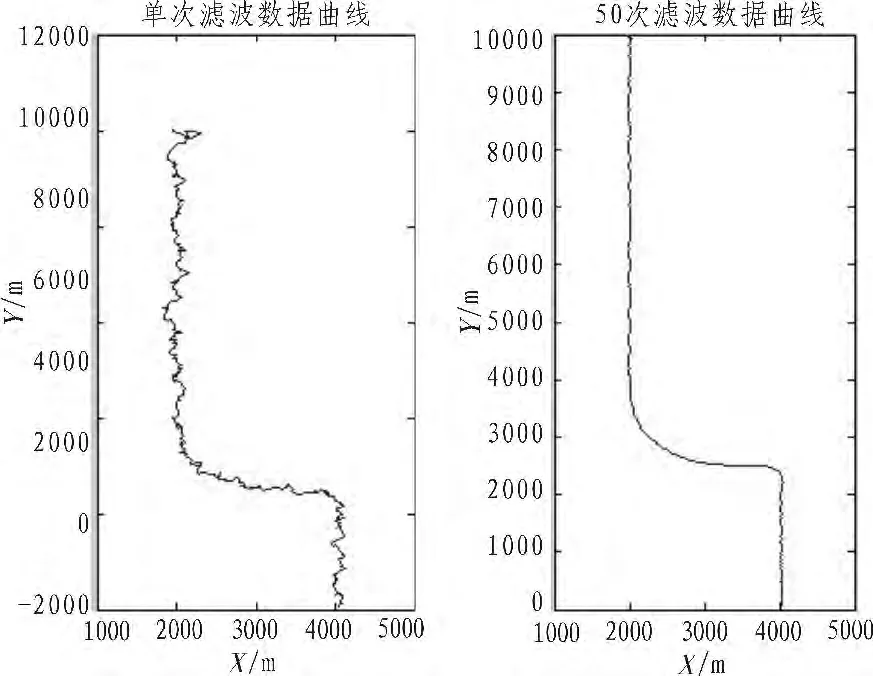
图7 单次滤波与50次滤波均值曲线对比Fig.7 The comparison between the single filtering mean curve and the 50 times one

图8 x滤波误差均值与误差标准差曲线Fig.8 The average value of X direction filtering estimation error and the curve of standard deviation
仿真实验表明,卡尔曼滤波算法在对运动目标跟踪中,可以实时地处理数据,利用卡尔曼滤波算法可以对运动目标的位置,速度和加速度进行精度较高的实时跟踪。精确的实时跟踪不仅可以应用在智能交通系统中,对车辆进行检测和跟踪,向总服务器实时反馈流量信息,从而对路段进行管理,避免拥塞和堵车。此外,还可以应用在军用领域中,如电视跟踪和红外跟踪等。
但是,从实验结果可以看出,卡尔曼滤波对非机动目标的跟踪效果要优于机动目标。即在目标出现机动的时刻,使用卡尔曼滤波可能会导致滤波发散,使滤波值和目标真实值之间的误差增大,这时卡尔曼滤波会不适宜于精度要求较高的场所。在以后的研究中,要对自适应性的滤波技术以及多种滤波技术的结合如VD变维滤波和卡尔曼滤波的结合等进行更进一步的研究。
[1]杨飞.浅析我国智能交通系统的发展对策 [J].才智,2010(21):67-68.YANG Fei.Analyses countermeasures for the development of intelligent transportation systems in China[J].Intelligence,2010(21):67-68.
[2]Singer R.Estimating optimal tracking filter performance for manned maneuvering targets.IEEE Trans[J].on AES,1982:473-483.
[3]ZHU Hua-ping.Target tracking using Kalman Filter Embedded Trust Region[C]//Test and Measurement,2009.ICTM'09.International Conference on,2009:119-122.
[4]Wiener N.Extrapolation,interpolation and smoothing of stationary time series[M].New York:Wiely Press,1949.
[5]Chartchai Meesookho,Shrikanth Narayanan.Distributed Range Difference Based TargetLocalization in Sensor Network[J].Signals,Systems and Computers,2005:205-209.
[6]靳璐.机动目标跟踪及无迹滤波 (UKF)的相关应用研究[J].战术导弹技术,2009(1):20-32.JIN LU.The tracking of the maneuverable target and research of UFK[J].Tactical Missile Technology,2009(1):20-32.
[7]宋亚姬.基于卡尔曼滤波的运动目标检测与跟踪技术研究[D].长春理工大学,2011.
[8]苑柳青.基于粒子滤波的视频运动目标跟踪方法研究[D].甘肃:兰州理工大学,2011.
[9]蒋志凯.数字滤波与卡尔曼滤波[M].北京:中国科学技术出版社,1993.
猜你喜欢
当代医药论丛(2021年3期)2021-03-17 07:03:12
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
高中生学习·高三版(2016年1期)2016-05-30 05:45:06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:20
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
赤峰学院学报·自然科学版(2015年15期)2015-03-21 00:30:56
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:01
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:38
电子设计工程(2014年6期)2014-02-27 11:56:54