
国外空间目标激光三维成像雷达关键技术分析
2014-01-19 07:27宋一铄杜小平曾朝阳
装备学院学报 2014年1期
宋一铄, 杜小平, 曾朝阳
(1.装备学院研究生管理大队,北京101416; 2.装备学院航天指挥系,北京101416; 3.装备学院光电装备系,北京101416)
国外空间目标激光三维成像雷达关键技术分析
宋一铄1, 杜小平2, 曾朝阳3
(1.装备学院研究生管理大队,北京101416; 2.装备学院航天指挥系,北京101416; 3.装备学院光电装备系,北京101416)
激光三维成像雷达可同时获得目标的灰度像和距离像,是完成空间目标识别、交会对接和在轨服务等任务的关键测量设备之一。在研究其基本原理、系统组成和关键性能的基础上,对不同体制激光三维成像雷达的关键技术实现途径进行了分析与比较,并总结了制约其在空间中应用的技术瓶颈。
激光三维成像雷达;空间目标;探测原理;技术实现途径
在空间目标识别、交会对接和在轨服务等任务中,目标的相对距离、速度和相对姿态信息可以通过解算空间目标上特征点的空间坐标获得[1]。
对于空间非合作目标,由于目标上安装的GPS接收机可能失效或非合作,因此1 km以远距离的非合作目标主要依靠地面雷达进行测量,辅助测量设备为激光测距仪[2];在1 km以内至1 m的临近操作和最终接近阶段,激光三维成像雷达和相机类探测器具有不同的优势,相机类探测器可以在20 m以内距离给出极高的测量精度(mm量级)和极高的空间分辨率,特别适合于控制机械臂进行精密操作,但其精度随距离迅速恶化[3-4],不适用于临近操作阶段,相比之下,激光三维成像雷达可以在临近操作和最终接近阶段提供所需的测距精度(cm量级),因此成为各航天大国研究的热点。本文将在介绍激光三维成像雷达原理、系统组成和关键性能的基础上,对不同体制激光三维成像雷达的关键技术实现途径进行分析与比较,同时总结了制约激光三维成像雷达在空间应用的技术瓶颈。
1 闪光成像雷达
1.1 基本原理与系统性能
闪光成像雷达(flash LADAR)基于脉冲飞行时间激光测距,利用1个(或几个)脉冲通过“闪光成像”的方式一次性获得目标的三维信息[5]。其核心器件是光电传感器阵列以及集成在上面的激光雷达处理器,如图1所示。

图1 闪光成像雷达接收阵列结构图
闪光成像雷达处理器由多个芯片单元组成,每个单元通过铟缩柱连接工艺与对应光电传感器阵列中的探测单元相连。芯片单元的主要功能是对每个探测单元单独计时并采集回波脉冲信号。在激光脉冲发射的同时,每个芯片单元与1个精准的斜降电压相连,当回波脉冲幅度超过触发门限时与斜降电压断开,保存得到的电压值以及回波脉冲的峰值,并由高速读出电路输出后进行信号处理。通过分析其工作原理可知,采集得到的斜降电压值与脉冲飞行时间呈线性关系。由于脉冲峰值大小会使触发门限的时刻提前或滞后,造成距离行出现误差,因此必须采集回波脉冲峰值以提高测距精度。
美国先进科学概念公司生产的“龙眼”闪光成像雷达[6]关键性能如表1所示。

表1 “龙眼”闪光成像雷达关键性能
1.2 关键技术实现途径及瓶颈分析
APD阵列的性能决定了系统的探测性能,而读出电路的性能则决定了系统的信号处理性能。因此APD阵列和读出电路的研制即为关键技术。为减小阳光干扰和保证使用安全,选择激光波长为1 550 nm,为此雷神公司开发了HgCd Te APD阵列[7]。它通过在P型HgCd Te上进行分子束外延生长n型HgCd Te制备,所生产的HgCd Te APD阵列在300 K环境温度下,响应度约为15 A/W,增益可以达到100以上,过剩噪声因子仅为2,噪声等效功率小于1 n W,带宽大于1 GHz。表2、表3为所实现的256像素×256像素HgCd Te APD阵列和读出电路的关键参数。

表2 HgCd Te APD阵列关键参数

表3 读出电路关键参数
雷神公司的256像素×256像素HgCd Te APD阵列及读出电路的突出优势:① 阵列集成度很高;②可在300 K温度和较高的增益下实现极低的过剩噪声;③读出电路使用0.18μm CMOS,加工难度和集成度很高;④读出电路噪声很低;⑤ 时钟计数频率很高(等效计数频率3 GHz)且平稳;⑥克服光学串话问题,在集成度很高情况下克服了读出电路单元间的串扰问题。
闪光成像雷达的突出优点是成像帧速高、图像无运动失真和抗背景光干扰能力强,适合用于为近场交会至最终接近阶段提供目标的三维图像。但是主要存在以下2个问题:① 脉冲激光峰值功率很高,当空间目标上有强反射点时,极易造成APD饱和甚至损毁,因此应提高探测器的抗饱和能力;② 较高的计时精度、较宽的信号传输、处理带宽和极高的信号采样率对读出电路要求很高,使得系统成本很高。
2 调频连续波激光三维成像雷达
2.1 基本原理与系统性能
该型雷达基于调频连续波激光测距原理[8],系统由信号发射子系统、接收子系统以及信号处理子系统组成,如图2所示。调制信号发生器产生锯齿型调频信号,其中一路输入激光调制电路作为连续波激光器的调制信号,另一路输入到接收子系统作为本振信号。激光器调制与驱动模块将调频信号与激光器偏置电流叠加,形成激光器驱动电流输入激光器,使得发射激光的瞬时光功率随调频信号变化。光电探测器将目标反射光转换成光电流,其中交流部分与本振信号混频形成包含目标信息的差频信号。差频信号经滤波、放大和采样后,通过解算其频率得到目标距离。

图2 调频连续波激光测距系统示意图
由美国陆军研究实验室开发(ARL)的“FOPEN”雷达[9]关键性能参数如表4所示。

表4 “FOPEN”雷达关键性能参数
2.2 关键技术实现途径及瓶颈分析
寻找合适的光电传感器完成光电混频是该体制成像的关键技术。ARL曾使用像增强管(IIT)进行了光电混频实验但效果不佳,主要因为:①IIT工作电压过高,实验中产生的峰-峰值为20 V的宽带调制电压产生的增益调制深度仅为10%~15%。②当调制频率高于500 MHz时,调制信号被严重吸收;ARL又使用了量子阱调制器(QWEO)进行了实验,发现器件无法响应足够带宽。需要指出的是,以上这2种接收器件都需要利用高速CCD对差频信号进行采集,从而限制了其进一步使用;此后,ARL实验了光电混频器(VMOD),其响应度随偏置电压和带宽迅速下降[10];在2000年以后的试验中,选用了金属半导体金属探测器(MSM)完成自混频接收,MSM对直流光信号不敏感,从而改善了混频效果。然而, MSM的响应度依然较低,仅为0.2 A/W[11-12]; ARL于2004年尝试使用电子轰击有源像素传感器(EBAPS)实现自混频接收,通过改进电路的接地方法和减少引脚电感,增大其响应带宽至400 MHz,通过使用50 W宽带放大器产生220 V峰-峰值的调制信号,使得调制深度达到31%[13]。2005年以后,ARL确定使用EBAPS作为该激光雷达的光电传感器[14]。
调频连续波激光三维成像雷达具有的突出优点是:抗背景和人为光干扰能力强、不存在测距盲区,特别是该体制不容易造成探测器饱和或损坏,因此特别适合用于临近操作至最终接近阶段的空间任务。但也主要存在以下2个问题:
1)寻找适合完成光电混频的光电探测器阵列仍然具有挑战性,应当进一步对APD进行光电混频实验,并对MSM探测器进行改进设计,提高光电混频性能;
2)需要对差频信号进行高速数字信号处理,以提高成像速度。
3 鉴相式激光三维成像雷达
3.1 基本原理与系统性能
该激光三维成像雷达基于鉴相式激光测距。图3为利用像增强器实现鉴相式激光测距系统结构图。
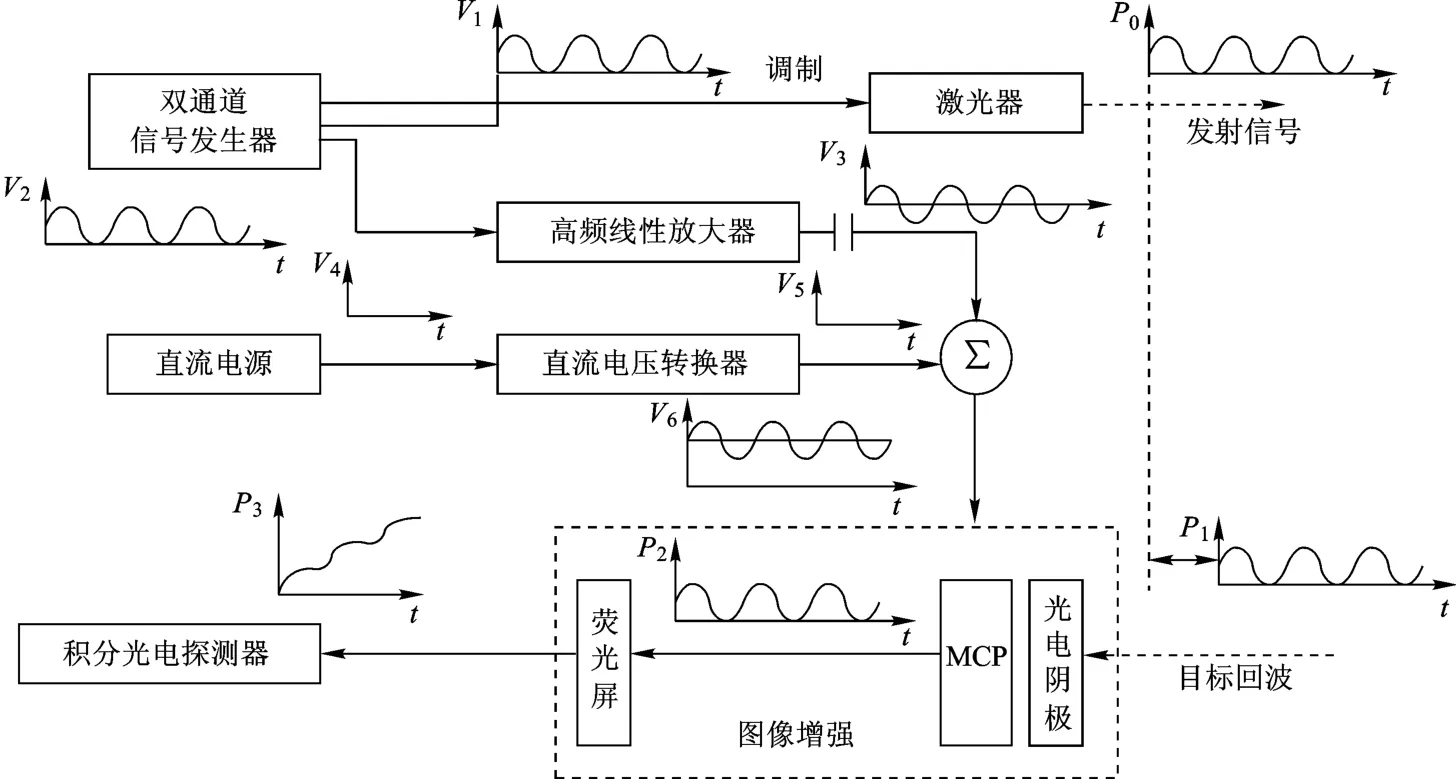
图3 利用像增强器实现鉴相式激光测距系统结构图
信号发生器产生2路同频同相的调制信号,其中V1对激光器功率调制,V2用于微通道板(MCP)电压调制。经过调制的激光发射信号P0照射在目标上,回波信号P1被光电阴极接收。V2经高频线性放大器提取出交流成分V3调制MCP电压,得到含有相位差信息的信号P2。P2信号照射在荧光屏上,用CCD相机检测即可得到含有相位差信息的积分值P3,通过精确测量该积分值并结合在无调制下的积分值即可根据测距原理解算得到目标距离。
由桑迪亚国家实验室(Sandia)研制的“LDRI”雷达[15]的关键性能参数如表5所示。
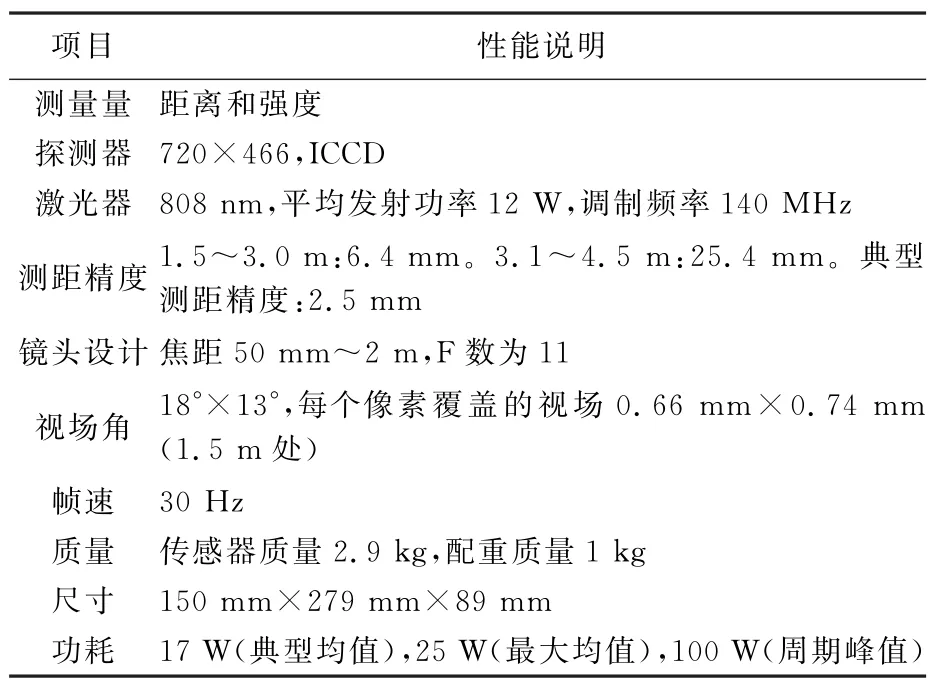
表5 “LDRI”雷达关键性能参数
3.2 关键技术实现途径及瓶颈分析
鉴相式激光测距对激光器本身和驱动源的稳定性要求很高,这是因为如果平均发射功率不稳定会造成调制时和去调制时的平均接收信号功率不同从而引起测距误差[16]。因此提高驱动源的稳定性是其关键技术之一,此外,CMOS或CCD传感器的噪声水平也会对测距造成较大影响。鉴相式激光三维成像雷达需要4次成像才能产生1幅三维图像,如果在4次成像过程中目标与雷达间存在相对运动,会造成图像运动失真。为此, Sandia曾经提出“分光器+光纤耦合”的并行成像解决方案,并研制了“SRI Quad Flash Sensor”,它将进入一个镜头的光分成4份并分别使用4个CCD进行处理,根据这4幅图像生成距离像。这样虽解决了图像运动失真问题,但却降低了测距精度,因为所使用的4个CCD不可能具有相同的性能,使得基于多幅图像联合处理的背景光/噪声抵消性能大幅下降,从而产生较大的测距误差[17]。
鉴相式激光三维成像雷达的突出优点是测距精度高、光电探测器成熟、信号处理简单,适用于临近操作至最终接近阶段的空间任务,尤其适合近距离超高精度高分辨率三维成像,航天器表面探伤等场合。但是主要存在以下3个问题:① 存在严重的距离模糊,应当通过多调制频率测量消除;②需要多次成像生成1幅三维图像,因此存在图像运动失真;③ 抗背景、人为光干扰能力较差。
4 光子计数激光三维成像雷达
4.1 基本原理与系统性能
对激光飞行时间进行统计测量[18]。激光发射时触发计数电路计数,在多个时间段内(对应多个空间距离段)统计光子计数个数。引发计数的可能是背景光、信号和APD自身的暗计数,但背景光和暗计数具有时空平均分布的统计特性,通过设定阈值即可滤除。图4对测量原理进行了说明。
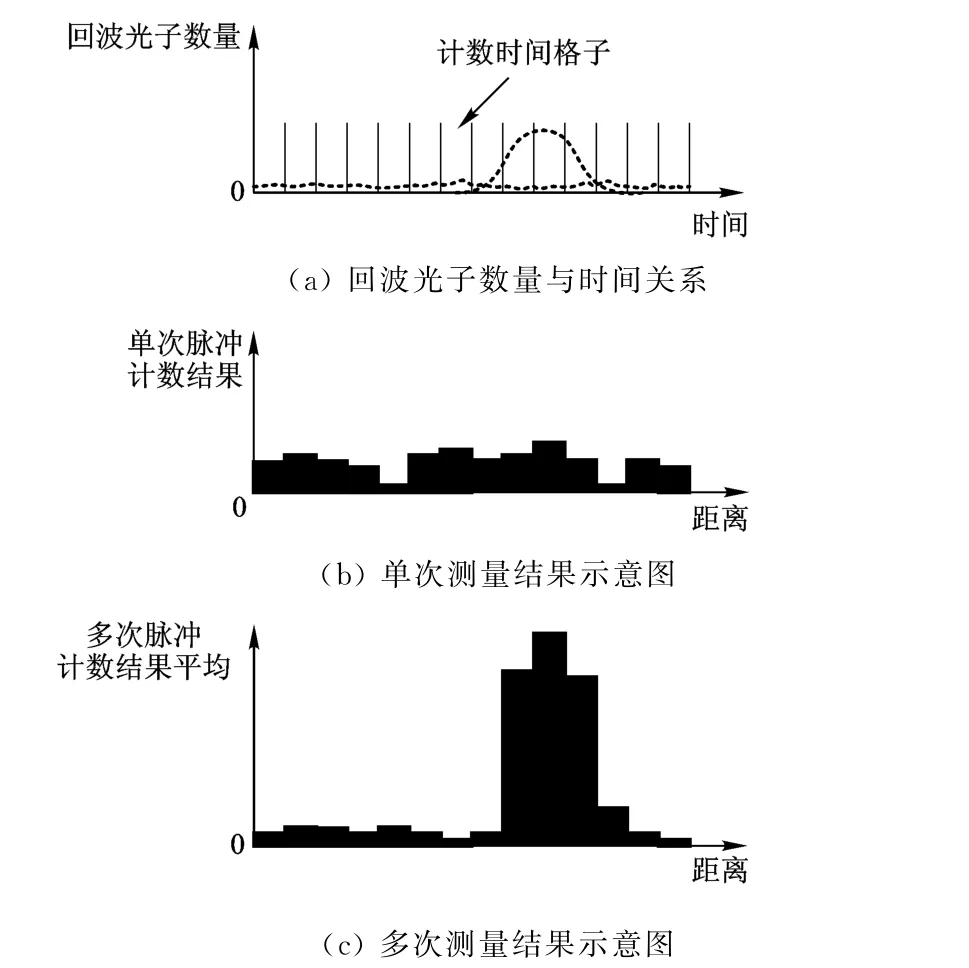
图4 光子计数激光测距原理示意图
如图4(a)所示为回波脉冲信号的光子密度随时间分布特性。回波中的背景光和探测器噪声可看作是随机到来的光子,其密度随时间的分布较为平均。探测器会响应每个接收到的光子(或噪声)并进行计数,最后处理电路将时间分为许多个计数时间格子(1个时间格子对应1个距离格子),得到每个格子内的光子计数值。由于回波激光信号和背景光(以及探测器的暗计数)都可以触发计数,因此对于1次脉冲测量(如图4(b)所示)是没有意义的,只有进行多次脉冲测量并且对计数结果进行统计才有意义,此时可更加明显地看到由激光脉冲信号引起的光子计数结果(如图4(c)所示)。
由麻省理工学院林肯实验室研制的实验样机的关键性能参数[19]如表6所示。
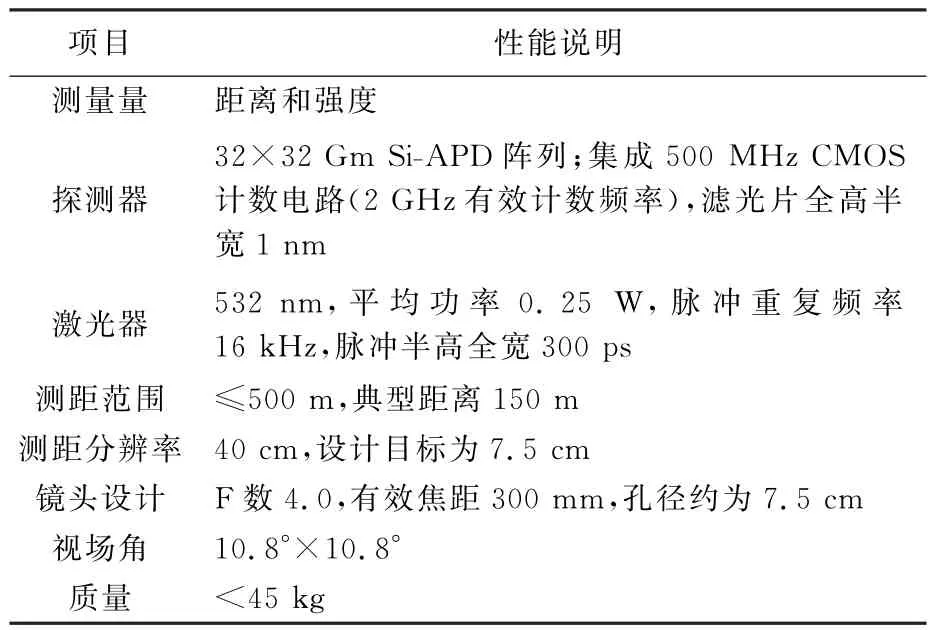
表6 光子计数雷达关键性能参数
4.2 关键技术实现途径及瓶颈分析
光子计数激光三维成像的关键技术是盖革模式APD焦平面阵列,它需要具有单光子探测灵敏度。盖革模式APD焦平面阵列由基于InGa As (P)/InP结构的盖革模式APD阵列(Gm APD PDA)、微透镜阵列(MLA)和读出电路(ROIC)组成[20],如图5所示。整个焦平面阵列固定在陶瓷插槽(ceramic interposer)上并通过TEC散热。APD阵列与读出电路靠铟缩球连接,读出电路控制APD阵列是否工作,在工作状态下,偏置电压比雪崩电压高5 V,工作持续时间(距离门时间)为几微秒。每个探测单元都包含有伪随机计时器、阈值检测电路、主动淬灭电路和存储单元,其中集成的计时器为11位分辨率,距离门时间一般为2μs,串行读出1 024个数据时,帧速可达到186 k Hz。位于APD阵列上方的磷化镓微透镜阵列用于提高有效填充系数,相比APD阵列固有的填充系数(约为9%),使用微透镜阵列后等效填充系数达到了70%以上。

图5 焦平面阵列结构图
光子计数激光三维成像雷达的突出优点是:可以使用很小的激光功率实现超远距离大范围成像。但该体制成像主要存在以下3个问题:① 需要较长的累计时间以实现统计数据采集,造成图像运动失真;②抗背景光、人为光干扰能力不强;③对焦平面阵列性能要求很高。
5 结束语
激光三维成像雷达是完成目标识别、交会对接和在轨服务等空间任务的关键测量设备之一,也是当前国外工程技术研究的热点。通过分析国外在研或使用的4种体制的激光三维成像雷达可知,其关键技术主要是研制适用于不同体制的高性能、高分辨率光电混合焦平面阵列,如对于闪光成像雷达和光子计数激光三维成像雷达,要求读出电路必须具有极高的处理速度;对于调频连续波和鉴相式激光三维成像雷达,要求光电探测器必须具有易于实现光电混频的能力。当用于空间目标探测时,对于闪光成像雷达,其主要瓶颈是高反射率空间目标容易造成探测器饱和或损毁;对于其余3种激光三维成像雷达,主要瓶颈为成像速度较慢造成图像运动失真。
References)
[1]徐文福,刘宇,梁斌,等.非合作航天器的相对位姿测量[J].光学精密工程,2009,17(7):1570-1581.
[2]Goddard Space Flight Center.On-orbit satellite servicing study project report[R].Greenbelt:National Aeronautics and Space Administration,2010:141-145.
[3]RUEL S,LUU T,BERUBE A.Space shuttle testing of the TriDAR 3D rendezvous and docking sensor[J].Journal of Field Robotics,2012,29(4):535-553.
[4]SELLMAIER F,SPURMANN J,GULLY S,et al.On-orbit servicing mission:challenges and solutions for spacecraft operations[C]//AIAA.SpaceOps 2010 Conference.Huntsville,Alabama,USA:AIAA,2010:1-11.
[5]STETTNER R,BAILEY H,RICHMOND R.Eye-safe laser radar 3D imaging[J].SPIE,2001,4377:46-56.
[6]CHRISTIAN J A,HINKEL H,DSOUZA C N,et al.The sensor test for orion Rel Nav risk mitigation(STORRM)development test objective[R].Houston:American Institute of Aeronautics and Astronautics,2010:1-20.
[7]MCKEAG W,VEEDER T,WANG JX,et al.New developments in HgCd Te APDs and ladar receivers[J].SPIE,2011, 8012:301-1-301-14.
[8]STANN B,GIZA M,ROBINSON D,et al.A scannerless ladar using a laser diode illuminator and FM/cw radar principles[J].SPIE,1999,3707:421-431.
[9]STANN B,REDMAN B C,LAWLER W,et al.Chirped amplitude modulation ladar for range and Doppler measurements and 3D imaging[J].SPIE,2007,6550:05-1-05-12.
[10]RUFF W,BRUNO J,KENNERLY S,et al.Self-mixing detector candidates for an FM/cw ladar architecture[J]. SPIE,2000,4035:152-162.
[11]RUFF W,ALIBERTI K,DAMMANN J,et al.Performance of an FM/cw prototype ladar using a 32-element linear selfmixing detector array[J].SPIE,2003,5086:58-69.
[12]STANN B,ALIBERTI K,CAROTHERS D.A 32×32 pixel focal plane array ladar system using chirped amplitude modulation[J].SPIE,2004,5412:264-272.
[13]REDMAN B C,STANN B,RUFF W,et al.Anti-ship missile tracking with a chirped amplitude modulation ladar[J]. SPIE,2004,5413:113-124.
[14]REDMAN B,RUFF W,STANN B,et al.Anti-ship missile tracking with a chirped AM ladar-update:design,model predictions and experimental results[J].SPIE,2005,5791:330-341.
[15]NELLUMS R O,HABBIT R D,HEYING M R,et al.3D scannerless ladar for orbiter inspection[J].SPIE,2006, 6220:G1-G17.
[16]李芳菲,张珂殊,龚强.无扫描三维成像激光雷达原理分析与成像仿真[J].科技导报,2009,27(8):19-22.
[17]HABBIT R D,NELLUMS R O,NIESE A D,et al.Utilization of flash ladar for cooperative&uncooperative rendezvous and capture[J].SPIE,2003,5088:146-157.
[18]HEINRICHS R M,AULL B F,MARINO R M,et al. Three-dimensional laser radar with APD arrays[J].SPIE, 2001,4377:106-117.
[19]CHO P,ANDERSON H,HATCH R,et al.Real-time 3D ladar imaging[J].Lincoln Laboratory Journal,2006,16 (1):147-164.
[20]ITZLER M A,Mark ENTWISTLE M,OWENS M,et al. Geiger-mode avalanche photodiode focal plane arrays for three-dimensional imaging LADAR[J].SPIE,2010,7808:C-1-C-14.
(编辑:孙陆青)
The Key Technology Analysis of Foreign 3D LADAR for Space Target
SONG Yishuo1, DU Xiaoping2, ZENG Zhaoyang3
(1.Department of Graduate Management,Equipment Academy,Beijing 101416,China; 2.Department of Space Command,Equipment Academy,Beijing 101416,China; 3.Department of Optical and Electronic Equipment,Equipment Academy,Beijing 101416,China)
3D laser detect and ranging(LADAR)can simultaneously acquire the gray scale image and the range profile of target which makes it the key equipment in the missions such as space target reorganization,rendezvous and docking and on-orbit service.The basic working principles,system configurations and key performances are studied and the key technical approaches are analyzed and compared for LADAR with different principles;furthermore,the technical bottlenecks that confine the uses in space are also summarized.
3D laser detect and ranging(LADAR);space target;detection principles;technical approaches
TN 29
2095-3828(2014)01-0055-06
ADOI10.3783/j.issn.2095-3828.2014.01.013
2013-03-19
部委级资助项目
宋一铄(1985-),男,博士研究生.主要研究方向:空间主动光学测量.stephensong1005@sina.com.cn.杜小平,女,教授,博士生导师.
猜你喜欢
数学小灵通(1-2年级)(2021年11期)2021-12-02
有色设备(2021年4期)2021-03-16
中等数学(2020年8期)2020-11-26
小学生学习指导(低年级)(2020年4期)2020-06-02
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
数学大王·低年级(2019年8期)2019-08-27
小学科学(2019年12期)2019-01-06
北京航空航天大学学报(2017年10期)2017-04-20
弹箭与制导学报(2015年1期)2015-03-11
