太阳能电池板角度控制系统的研究与设计
2014-01-15 01:43张朝阳徐敬龙
吉林师范大学学报(自然科学版) 2014年4期
张朝阳,徐敬龙
(吉林师范大学 信息技术学院,吉林 四平 136000)
0 引言
随着经济和现代化的高速发展,社会对能源的需求量也越来越大,而煤、石油等传统化石能源正日益枯竭,而且容易引起雾霾等严重的大气污染问题.相比之下,太阳能则是一种取之不竭的可再生能源,具有清洁、无污染、分布广泛、储量丰富等优势.利用太阳能发电已是未来能源开发的趋势.目前大多数的太阳能电池板都采用类似于太阳能热水器的“A”形方式,不利于太阳光的充分利用,限制了太阳能发电的推广应用.基于此设计一种基于51单片机的简易太阳能电池板角度控制系统,使得太阳能电池板平面与太阳光线始终在一定误差内保持垂直,提高太阳能电池板的发电效率.
1 太阳能电池板角度控制系统的硬件设计
本系统主要由光线探测、微控制器、电机驱动和太阳能采集装置等模块组成.
(1)太阳能采集装置.搭建平行阵列采集装置,它由聚光电池阵列、架体等组成.若干聚光电池经过串并联后平行排列在电池板上,构成电池阵列.通过加装折射式聚光器如菲涅尔透镜,可以使较大面积的太阳光会聚在一个较小的范围内,形成“焦带”或“焦斑”,并将太阳能电池置于这种“焦斑”或“焦带”上,可以获得更多的电能输出.这样,不仅对太阳光进行聚焦,而且对电池组件起到了保护作用[1-3].平行阵列在跟踪过程中对于太阳光线垂直于电池板的精度要求不高,有较大的容错率,整体成本较低.
(2)光线探测模块.采用光强比较法,其原理是光强度发生变化,光敏电阻的阻值随之变化.可以使用多个光敏电阻构成探测阵列,微控制器会根据阵列不同的响应,对电机进行相应控制,使得太阳光垂直照射到平面上.该方法具有测量精度高、电路简单、成本低廉和易于实现等特点.
本设计选用型号为MG42-5的光敏电阻器[2-4],其最高工作电压为20 V,额定功率5 mW,亮电阻≤20 kΩ,暗电阻≥2 mΩ.系统光线探测模块的圆筒式光电传感器结构如图1所示.
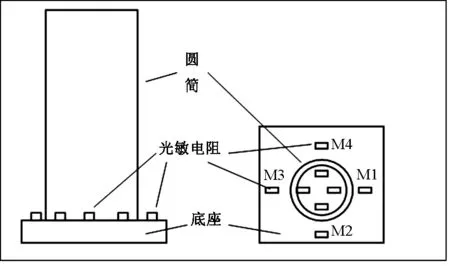
图1 光敏探测模块
它主要由8个光敏电阻和一个不透光的空心圆筒及底座组成.在圆筒的外侧,东、南、西、北四个方向上分别对称固定4只光敏电阻.其中M1、M3对称安装在圆筒的东西两侧,用来粗略的检测太阳光在水平面的垂直投影线偏转角;M2、M4 则对称安装在圆筒的南北两侧,用来粗略检测太阳的视高度即仰角.在圆筒内侧,东、南、西、北四个方向上也分别对称布置4只光敏电阻,用来精确检测太阳由东往西运动的偏转角度和太阳的仰度[4-6].圆筒的高度决定测量的精度,相同直径的圆筒,长度越长,到达圆筒底部的光线夹角越小,即精度越高.但是太高的精度则导致跟踪装置不断转动,消耗电能.经过理论计算,采用的圆筒直径为1 cm时,高度应为5 cm.当处理器采样到对称光敏电阻的大小不等,则太阳能电池板转向阻值小的一侧,直到对称电阻大小相等,即此时太阳光垂直或近似垂直于太阳能电池板.在此基础上,光敏电阻只需外加一个上拉电路,即可把光信号转化为电信号传给微控制模块[6].
(3)微控制模块.本设计的微控制芯片采用MPC82G516单片机实现[7-10].它是一种自带AD转换器的64K字节存储器的8位微处理器芯片,可以反复擦除、烧写1 000 多次,可以很好的满足本系统的设计要求,其外围电路及引脚连接如图2所示.
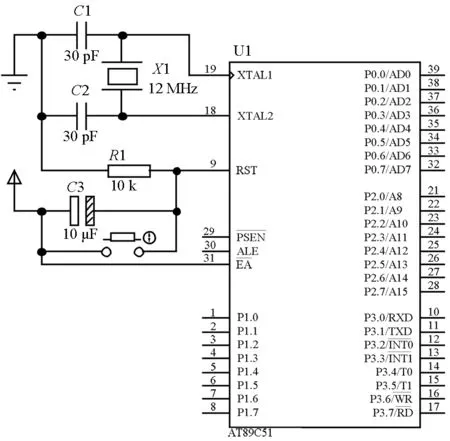
图2 单片机引脚分布及最小系统电路图
(4)电机驱动模块.本设计采用ULN2003作为步进电机的驱动,成本低,而且稳定.步进电机驱动电路如图3所示.本设计中太阳能电池板的角度调节正是依靠于支架上水平轴步进电机和仰角轴步进电机的合理转动来实现[11-12].
2 太阳能电池板的角度控制系统的软件设计
本系统的整体程序设计思想是首先光线探测模块通过光电传感器完成太阳光线相关参数采集,并传送给微控制模块,微控制器将接收到的光线参数信息经过计算处理,向电机驱动模块发送控制指令,分别驱动太阳能电池板的水平轴和仰角轴,实现对电池板角度的调节,使电池板平面与太阳光线的夹角维持90°,提高太阳能电池板的发电效率.系统整体流程图如图4所示.
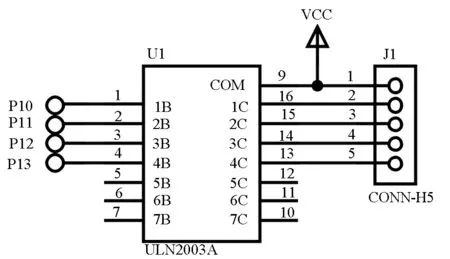
图3 步进电机驱动电路
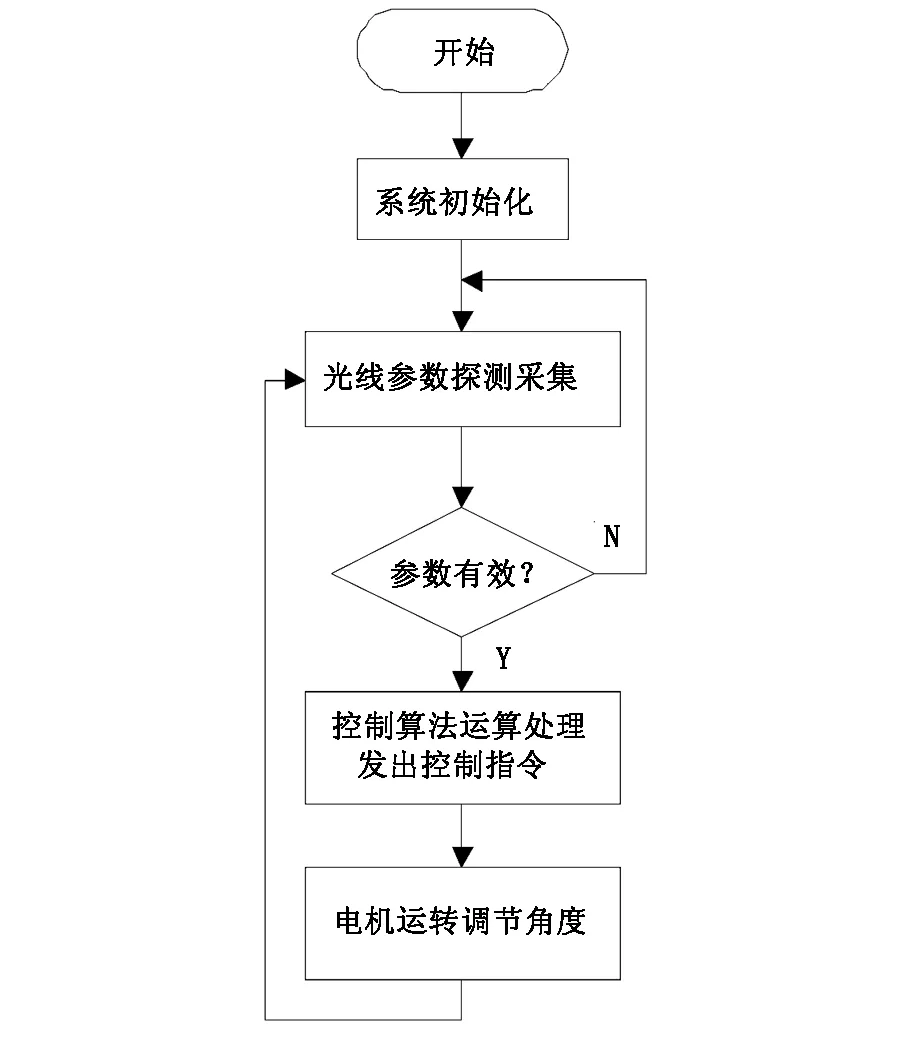
图4 系统整体流程图
由于探测模块特殊的结构,不同方向的阳光照射会使各个光敏电阻发生不同变化.通过上拉电压,就可以把光信号转为相应电压信号,再通过控制芯片即单片机内部的10位A/D转换功能,进一步运算处理得到较为精确的数字量光线参数.探测、辨别部分程序如下:
unsigned char ADC (uchar channel)
{
unsigned char AD_finished; //存储A/D转换标志
unsigned char ADC_DATA=0;//存储A/D转换结果
ADCTL=(0XE0|channel);//选择A/D当前通道
P1M0|=1;P1M1&=0XFE;//配置P1.0为只输入模式
AUXR&=0XBF; //ADRJ=0:ADCH包含高八位;ADCL包含低2位
Delay1ms(); //使输入电压达到稳定
Delay1ms();
Delay1ms();
ADCTL|=0x08;//令ADCS=1,启动A/D转换
AD_finished=0;
while(AD_finished==0) //等待A/D转换结束
{//0001,0000,ADCI==1测试A/D转换是否结束
AD_finished=(ADCTL&0x10);
}
ADC_CONTR&=0x7F;//令ADCON=0,关闭A/D转换
return(ADC_DATA); //返回A/D转换结果
}
3 数据测量和系统调试
对各个独立模块进行模拟测量,即通过给定相关参数,观察、测量、记录各模块的相应变化,现得结果如下:
(1)光的强度在AM1.5时,通过施加不同入射方向的光信号,比较探测模块的灵敏度,发现、入射方向接近90°时,探测模块灵敏度最高,见表1.

表1 AM1.5下不同角度测量数据
(2)外加电源并给出相应控制信号,测试微控制模块的相应功能.经调试,达到了信号输出0.1 s以内,电机驱动0.5 s以内的延时要求,见表2.

表2 不同控制信号下电机反应时间
(3)输入确定角度信号,测量双轴转向支架的朝向角.经过对支架的传动连接部分的校对,达到3°的精度要求,见表3.

表3 AM1.5下不同角度测量数据
(4)把各个模块组合成一个整体,并进行实际情况下的综合调试.选择阳光充足的晴朗天气,把系统置于阳光下,观察、测量电池板与太阳光入射方向夹角,在不同时段对系统工作状态进行详细记录.经过多次不同情况下的调试,本系统已能实现在误差5%以内对太阳光线入射角度的有效追踪,电池板发电效率明显高于固定电池板,见表4.
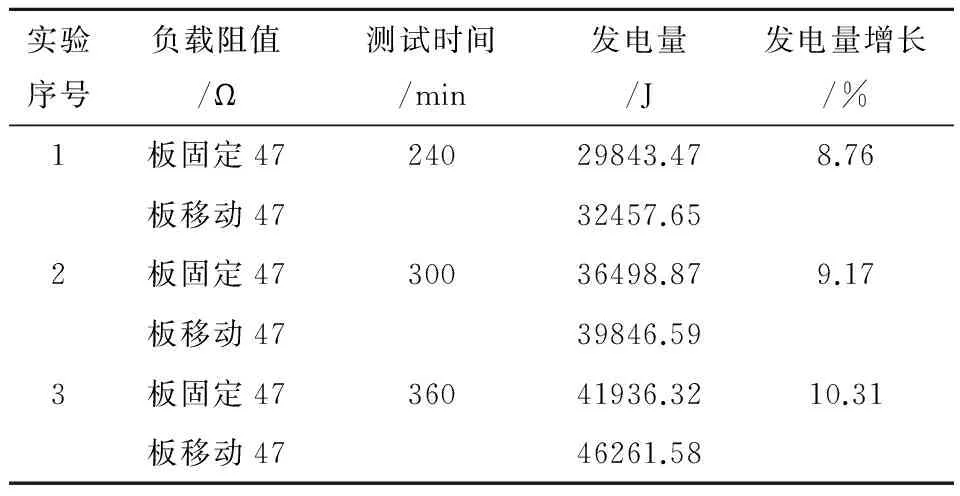
表4 不同时间下板固定和移动的测试数据
4 总结
本文设计出基于51单片机的太阳能电池板角度控制系统,经过模拟仿真和实际测试,系统稳定,结构简单,价格低廉,角度调节精度±5°,完成太阳能电池板对太阳光的智能跟踪,提高了电池板的发电效率.
[1]谢维成,李钟实.太阳能光伏发电系统设计施工与应用[M].北京:人民邮电出版社,2012.
[2]杨 东,轩克辉,董雪峰.光敏电阻的特性及应用研究[J].山东轻工业学院学报(自然科学版),2013,27(2):49~52.
[3]王红睿,王玉鹏,方 伟.智能双模式太阳跟踪器[J].光学精密工程,2011,19(7):1605~1611.
[4]王双园,白国振.基于PLC的太阳主动跟踪系统的设计[J].太阳能学报,2012,33(11):1903~1907.
[5]张春光.太阳能电池板二维自动跟踪系统的研究[D].太原:太原科技大学,2013.
[6]田 丰,孙丽妍.光电式太阳光跟踪传感器的应用[J].北京石油化工学院学报,2012,20(2):52~55.
[7]杨加国.单片机原理与应用及C51程序设计(第2版)[M].北京:清华大学出版社,2009.
[8]陶 涛.太阳能板自动追光系统设计与实现[D].合肥:安徽大学,2013.
[9]贺新升,高春甫,王 彬,等.太阳自动跟踪机构的设计和位姿分析[J].光学精密工程,2012,20(5):1048~1054.
[10]张秀再,王婷婷,黄建松.太阳能板自动寻光转动控制系统[J].南京信息工程大学学报(自然科学版),2014,6(3):231~234.
[11]叶宝安,乔国栋,周书民,等.太阳能板最佳安装角度测量系统设计与实现[J].电子测量技术,2014,37(6):127~130.
[12]张 翔.太阳能板自动跟踪系统[D].西安:西安工业大学,2012.
猜你喜欢
小猕猴智力画刊(2022年11期)2022-11-28
小天使·一年级语数英综合(2021年8期)2021-08-17
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
数学大王·低年级(2020年8期)2020-08-14
山西青年(2017年8期)2017-01-31
物理实验(2014年8期)2014-09-12
机械制造与自动化(2014年1期)2014-03-01
机电信息(2014年5期)2014-02-27
湖南师范大学自然科学学报(2013年5期)2013-03-11
装备制造技术(2012年12期)2012-08-31