
无线传感网中定位算法研究
2014-01-14 00:43张现利张丽翠朱晓男孟晓龙
吉林大学学报(信息科学版) 2014年4期
张现利,张丽翠,朱晓男,孟晓龙
(吉林大学通信工程学院,长春130012)
0 引言
无线传感器网络(WSN:Wireless Sensor Network)[1,2]是以感知为目的的自组织体系,该体系包括传感器节点、汇聚节点和管理节点,被广泛用于军事、医疗和环境监测等方面。当WSN应用在实物追踪、敌情监视等位置相关领域时,若其不附有准确的位置信息,则毫无意义可言,故需用定位技术获取其位置信息[3,4]。可见定位技术是无线传感器网络的重点支撑技术之一。
已知未知节点和锚节点之间的跳数、估算距离或角度,可直接利用极大似然估计法等求得未知节点的位置[5]。定位算法常遵循不同的标准进行分类,依据定位时是否需要测量节点间的距离或角度,可将其分为基于距离和距离无关两种定位算法[6]。前者包括RSSI,TOA(Time of Arrival)和AOA(Angle of Arrival)等;后者包括质心算法、DV-Hop(Distance Vector-Hop)算法[7-9]等。一般地,定位精度越高、能耗越小、锚节点密度越低,算法的性能越好。
目前,RSSI的研究总体上分为两类[10-12]:一类是对传输损耗模型进行优化,更加有效真实地模拟实际环境;另一类是运用多种的测量方法。针对具体环境,选用最合适的传输损耗模型,尽可能地将误差降到最小化。而笔者就是依照第2种思路进行研究的。Radar(雷达)室内定位系统[2]是最早结合RSSI值和三边测量法的一种系统,但开销较大。Liu等[13]采用交叠环定位的方式,利用含有未知节点的交叠环形区域定位未知节点,中间只是比较了RSSI值的大小。近几年,利用RSSI和三角质心定位法相结合实现定位的算法也不在少数,但都过于复杂。针对以上算法过于复杂以及开销大的问题,笔者通过选取适当的邻居节点个数,并剔除失真严重的数据对未知节点进行定位,算法简单,效率高,能耗小,能更加精确地实现定位。
1 RSSI算法原理研究
RSSI是接收信号强度指示的简称,单位为dBm。信号在传播时总有一定的损耗,且损耗值随着距离的增加而增加,RSSI算法正是利用损耗值与传播距离间的关系进行距离测量和定位的。接收节点利用一定的传播损耗模型算出自身与发送节点间的距离后,采用极大似然估计法等进行自身的定位。RSSI定位算法是基于距离的定位算法,是其中应用最广泛的算法,且与其他算法相比,它无需添加多余的硬件设备,只需利用信号传播损耗模型进行定位即可,实现简单、节能且降低通信开销。
常用的信号传播损耗模型[14]有下列3种。
1)自由空间(Free-Space)传输模型。Free-Space传播模型利用损耗值、信号频率和距离三者之间的关系进行距离测量,其三者间关系如下

其中λ是信号波长,d为两节点距离,L为传播损耗值。Free-Space传播模型适用于理想环境下,传播距离近且无障碍物,直线传播,因而使用范围较窄。
2)Two-Ray Ground Reflection传播模型。也称为双地面反射模型,它兼顾了直线传播和反射现象两种情况的存在,即假设信号的传播路径有两条:直线路径和反射路径,该模型可表示为

其中与Free-Space传播模型中相同的变量所代表的含义不变,ht和hr分别表示发射和接收节点处的高度。该模型在距离较近时,可等价于Free-Space传播模型,在距离较远时,因其考虑反射因素,故性能优于Free-Space传播模型。
3)Shadowing模型。又称为遮蔽模型或渐变模型。前两种模型受距离限制且信号传播为理想的圆模型,且Free-Space模型只单一考虑了直线传播的情况,Two-Ray Ground Reflection模型也只在距离较远时才会表现出较好的性能。然而Shadowing模型不仅考虑了多径效应以及信号随机的情况,还考虑了实际存在的噪声对信号强度的影响,因此,它比前两种模型的应用更加广泛。
该模型分为传播损耗模型和符合高斯分布的Shadowing模型。
①传播损耗模型。参考一个已知距离d0和与该距离相对应的接收功率P(d0),距离为d处的功率为P(d),可得到该模型为

其中n为损耗因子,范围在2~6之间,直线传播时取1.6~2,中间有障碍物时取2~6。

②符合高斯分布的Shadowing模型。该模型为其中XdB是以0为均值、以σdB为方差的高斯随机变量,σdB是一个经验测量值,取值在3~12之间。
可见Shadowing模型更加符合实际需求,且定位精度比其他模型高,因而笔者采取该模型进行分析研究。笔者先采集RSSI值,之后采用Shadowing模型估算节点间的距离,最后再利用极大似然估计法进行节点间的位置估计。
2 RSSI算法的仿真及性能分析
仿真环境为:假设节点静止,有50个节点随机部署在25×25 m2的区域内,其中锚节点20(或15)个,节点通信半径设为15 m。未知节点依靠临近的n个锚节点定位,令n=4,且产生一个均值为0、方差为0.36的高斯随机序列,以代表多径效应的影响。
得到仿真结果如图1~图3所示,图1a中五角星表示信标节点,圆点表示未知节点,图1b中用虚线连结节点的定位位置和实际位置。由图1~图3可知,在这种情况下,定位的距离误差整体表现为0~5 m,平均距离误差在1 m左右,定位精度较高。
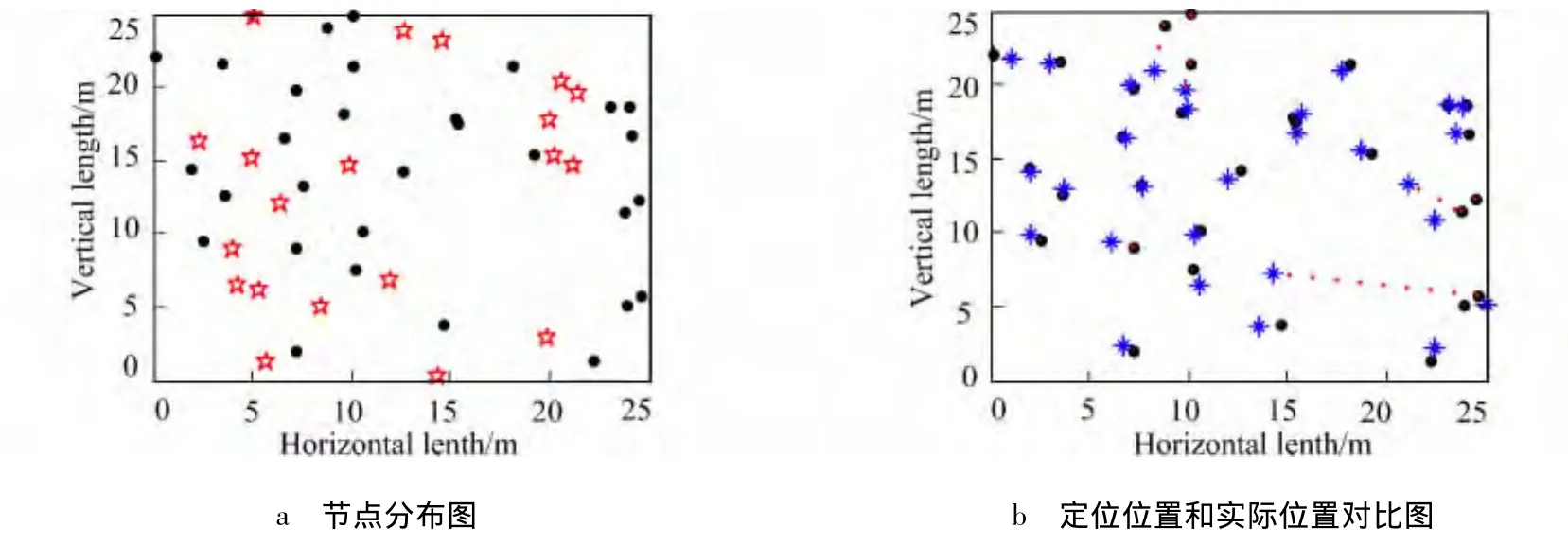
图1 RSSI定位结果Fig.1 The results of RSSI localization

图2 RSSI定位距离误差Fig.2 RSSI localization distance error
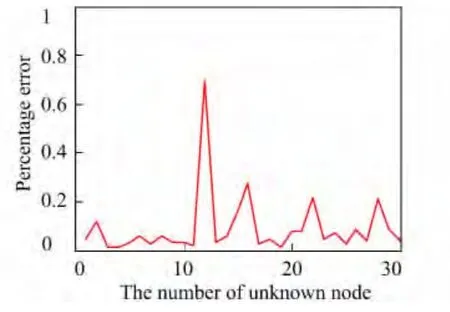
图3 RSSI定位精度Fig.3 RSSI localization accuracy
3 误差来源分析
从仿真结果可看出存在一定的误差,所以要想达到更高的定位精度则需要了解并分析造成误差的原因,下面将具体分析说明3种典型的误差来源。
1)环境因素。由于RSSI定位算法需要通过信号传输实现定位,然而信号传输必定会受到其传输信道环境的影响,如室内室外环境差异、温度、湿度、障碍物以及地表材质等,这些因素都会使信号发生较大的变化。因此,仿真时应设定不同的环境参数,以使仿真更加具有真实性。
2)节点自身等硬件的限制。算法的实现是依靠硬件进行的,因此硬件的好坏对定位精度的影响也是不可估量的[15]。如需要借助节点处的天线阵列测试RSSI值,所以天线阵列的方位以及倾斜角度等都会影响RSSI值的测量;同时信号传输过程中会受到地表不同程度的反射,将天线置于海拔较高的地方可减少反射的影响,故天线的高度也对定位造成影响[16]。
3)算法自身的限制。一些定位算法,由于适用范围的局限性定位精度将非常低;有些算法在定位过程中依据一定比例的锚节点才能实现,然而当锚节点的信息被阻碍时,其定位也不能很好地实现;RSSI定位算法中参考节点过多时,定位性能也不好;算法本身的精细程度等对定位的实现有制约性。
4 RSSI算法的改进及仿真验证
4.1 基于n个锚节点的仿真及分析
笔者在获知各节点间距后,采用极大似然估计法进行定位,下面分别讨论n=3、n=6和n=8情况下的RSSI定位。这里假定条件和仿真环境与原算法相同,选取其中一次定位仿真结果,即如图4~图6所示。
笔者在获知各节点之间的距离后,采用极大似然估计法进行定位。极大似然估计法是依据未知节点的邻居锚节点的坐标及个数(大于等于3)并使用最小均方差估计方法进行定位的,该仿真场景仅部署了50个节点,通过仿真分析得知邻居节点个数不同,定位精度也有所不同,因而笔者选取n=3、n=6和n=8的情况进行讨论分析。

图4 n=3时的定位情况Fig.4 The localization of n=3
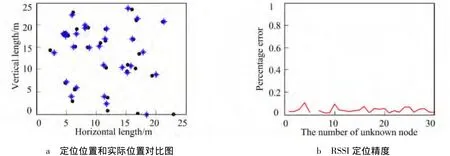
图6 n=8时定位情况Fig.6 The localization of n=8
对比图4和图5可分析得到,如果n值选取太小,则定位误差较大,且在一定范围内,n值越大,定位误差越小。即当未知节点的邻居锚节点个数适当增加时,定位精度也相应增大。考虑到硬件成本等问题,笔者选取n=4对原算法进行改进。
4.2 改进算法的仿真及分析
RSSI值与距离间存在固定的特性,即当近距离时,RSSI值随着距离的增加而缓慢减小;当远距离时,RSSI值随着距离的增加而急速减小;当有移动物体时,RSSI值有时也会产生严重的失真情况。
笔者采取优胜劣汰方式,即选取最优值,剔除失真数据。具体思想是:先多次测量两节点间的RSSI值并取平均,再用平均值对之前的测量值进行筛选,即将那些偏离于平均值较大的数据视为失真较严重的数据,并设适当的权值筛选剔除,最后对剩余数据再进行平均处理,利用该值进行距离估计。对此改进算法进行仿真,其中n=4,本次仿真中测量次数定为50次,锚节点数为15,得到结果如图7~图9所示。可见,其定位精度比原算法更高,性能更稳定。
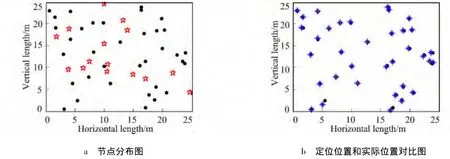
图7 定位结果图Fig.7 The location result diagram
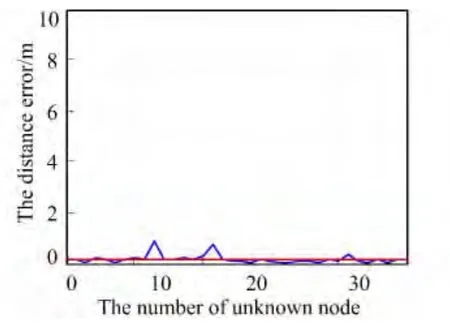
图8 RSSI定位距离误差Fig.8 RSSI localization distance error
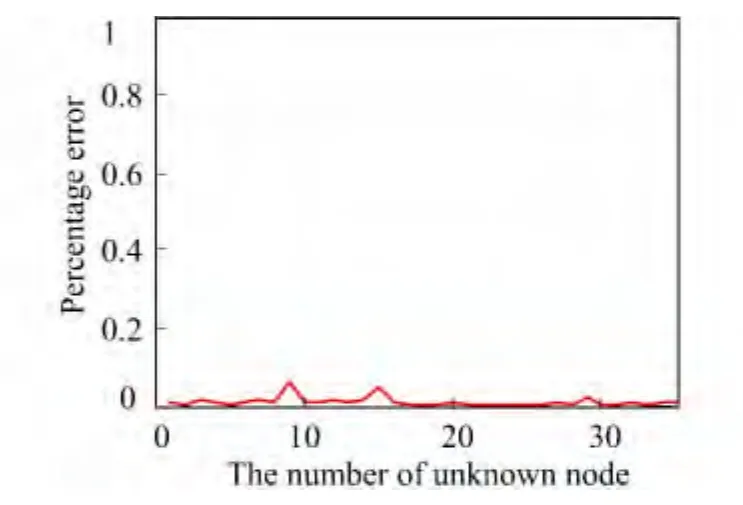
图9 RSSI定位精度Fig.9 RSSI localization accuracy
5 结语
笔者重点研究RSSI算法,讨论未知节点周围的邻居锚节点个数对定位精度的影响,并选取数学最优法对原算法进行改进,选取出合适的邻居锚节点数进行仿真实验。结果表明,改进算法相对于原算法在定位精度上有所提高。但笔者所做的工作还有一些问题需要解决,如搭建硬件、完善仿真等,如何扩大该算法的使用规模将是后续研究工作的重点。
[1]王营冠,王智.无线传感器网络[M].北京:电子工业出版社,2012.WANG Yingguan,WANG Zhi.Wireless Sensor Network[M].Beijing:Publishing House of Electronics Industry,2012.
[2]孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005.SUN Limin,LI Jianzhong,CHEN Yu,et al.Wireless Sensor Network[M].Beijing:Tsinghua University Press,2005.
[3]ZHANG Licui,ZHANG Guoqiang,WANG Zhigang,et al.GPSR Routing Protocol in Urban Environment[J].Applied Mechanics and Materials,2011,63:416-420.
[4]ZHANG Licui,XU Xu,WANG Zhigang,et al.Model of Vehicular Movement in Simulation of Vehicular Ad Hoc Networks[J].Advanced Materials Research,2011,204:391-394.
[5]ZHANG Licui,WANG Dan,XU Xiaofei.Research on Improvement of LEACH Protocol with Heterogeneous Nodes[J].Advanced Materials Research,2013,765:1675-1679.
[6]GU Shuang,YUE Yong.Localisation Algorithm in Wireless Sensor Networks[C]∥Automation and Computing(ICAC),Huddersfield:2011 17th International Conference on.Huddersfield:IEEE,2011:28-33.
[7]DU Jiang,ZHANG Xiaohang.Research and Improvement of Localization Algorithm for Wireless Sensor Networks[J].Energy Procedia,2011,13:8969-8975.
[8]尚小航.基于DV-Hop的无线传感器网络定位算法研究[D].长春:吉林大学通信工程学院,2012.SHANG Xiaohang.Wireless Sensor Network Localization Algorithm Based on DV-Hop[D].Changchun:College of Communication Engineering,Jilin University,2012.
[9]TOMIC S,MEZEI I.Improved DV-Hop Localization Algorithm for Wireless Sensor Networks[C]∥Intelligent Systems and Informatics(SISY),2012 IEEE 10th Jubilee International Symposium on.Subotica:IEEE,2012:389-394.
[10]冯爱丽.基于RSSI的无线传感器网络室内定位研究[D].太原:太原科技大学计算机科学与技术学院,2012.FENG Aili.Wireless Sensor Network Localization Method Based on RSSI Technology[D].Taiyuan:College of Computer Science and Technology,Taiyuan University of Science and Technology,2012.
[11]彭刚,曹元大,孙利民.无线传感器网络节点定位机制的研究[J].计算机工程与应用,2005,40(35):27-29.PENG Gang,CAO Yuanda,SUN Limin.Research on Node Localization in Wireless Sensor Networks [J].Computer Engineering and Applications,2004,40(35):27-29.
[12]章磊,黄光明.基于RSSI的无线传感器网络节点定位算法[J].计算机工程与技术,2010,31(2):291-294.ZHANG Lei,HUANG Guangming.Wireless Sensor Network Node Localization Algorithm Based on RSSI[J].Computer Engineering and Technology,2010,31(2):291-294.
[13]LIU Chong,WU Kui,HE Tian.Sensor Localization with Ring Overlapping Based on Comparison of Received Signal Strength Indicator[C]∥Mobile Ad-hoc and Sensor Systems,Fort Lauderdale:2004 IEEE International Conference on.[S.l.]:IEEE,2004:516-518.
[14]詹杰,吴伶锡,唐志军.无线传感器网络RSSI测距方法与精度分析[J].电讯技术,2010,50(4):83-87.ZHAN Jie,WU Lingxi,TANG Zhijun.Wireless Sensor Network Analysis and Accuracy of RSSI Ranging Method [J].Telecommunications Technology,2010,50(4):83-87.
[15]DING Xuyang,ZHAO Hai,ZHU Jian,et al.A Novel Localization Algorithm Based on RSSI for Wireless Sensor Networks[C]∥Wireless Communications,Networking and Mobile Computing(WiCOM),2011 7th International Conference on.Wuhan,China:IEEE,2011:1-4.
[16]杜巧玲,钱志鸿,王树勋.无线传感器网络二维协作式定位方法[J].吉林大学学报:信息科学版,2009,27(2):167-172.DU Qiaoling,QIAN Zhihong,WANG Shuxun.Cooperative Location Scheme for 2D Wireless Sensor Networks[J].Journal of Jilin University:Information Science Edition,2009,27(2):167-172.
猜你喜欢
军事文摘(2023年4期)2023-04-05
无线互联科技(2021年4期)2021-04-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
测控技术(2018年4期)2018-11-25
电子制作(2016年15期)2017-01-15
新闻传播(2016年11期)2016-07-10
云南电力技术(2015年2期)2015-08-23
