
子环分布式光纤定位矿井救援系统设计
2014-01-14 00:43陈丽娟李志军孙立书
吉林大学学报(信息科学版) 2014年4期
陈丽娟,李志军,孙立书,高 健
(1.黑龙江科技大学电子与信息工程学院,哈尔滨150022;2.浙江东方职业技术学院工程技术系,浙江温州325011)
0 引言
矿井下人员定位系统被列为矿井下六大避险系统之一。目前,常用的无线传感器网络人员定位系统包括以以太网、SUPER-RFID(Radio Frequency IDentification)、Zigbee、微功率为代表的定位系统。但都存在一些缺点和不足:如对井下人员监控的位置不够精确;需要安装大量的基站,成本高;设备必须是本安和防爆的,因为是有源的,矿难发生停电后,无法正常工作等。针对以上问题,笔者提出了基于子环分布式光纤定位的矿井救援系统,该系统具有无源、高灵敏度和高光信噪比等特点。在矿难发生时,被困人员可以通过敲击地面和巷道壁,产生震荡信号,此信号经光纤传输到救援定位系统中,对被困人员进行高精度的定位,为事故抢险提供科学依据。
1 系统结构设计
对光纤传感系统,亟待解决的问题是当检测的物体面积巨大或是很长的光纤传输网络时,如何检测到震动的参数(如频率和位置等)信息。一些震动传感系统使用光纤环干涉仪检测光纤震动点,也有传感结构中利用Sagnac理论和其他额外的元件实现振动监测[1],还有传感系统如OTDR(Optical Time Domain Reflectometer)是使用密集光束检测到震动信息等。
改进的方法通常使用额外的元件获得信息,但增加了整个系统的成本。如文献[2]使用了波分复用技术的同时也使用了额外的光源、检测器和多个耦合器。为避免这些缺点,Tatsuya等[3]提出了分布式震动传感系统的位置检测技术,该结构可以检测到震动行为,但精确度不高。
笔者设计的子环分布式光纤定位矿井救援系统,能检测具体的振动位置,具有精度高,结构简单,额外成本低等特点。系统结构如图1所示,由一个SLD(Super Luminesent Diode)光源,一个3×3耦合器,一个2×2耦合器和一个图像检测器组成,并将光纤长度为L1的子环通过2×2耦合器耦合到主环上。主环传感光纤的长度为L0,光束在单模光纤中传输的速度为c,当光源产生的光传输到3×3耦合器上时,将光分成两束拥有等光强的相干光束即顺时针光束和逆时针光束[4]。
顺时针CW(ClockWise)和逆时针CCW(Counter-Clock Wise)方向的光束经过传感光纤传输重新相遇在3×3耦合器[5]。它们每束光分别经2×2耦合器又分成两束光,一束仍然经由子环传感光纤顺时针传输,另一束经由子环传感光纤逆时针传输。如此下去,可以被2×2耦合器分离n次[6],n=0,1,2,3,…(见图2)。
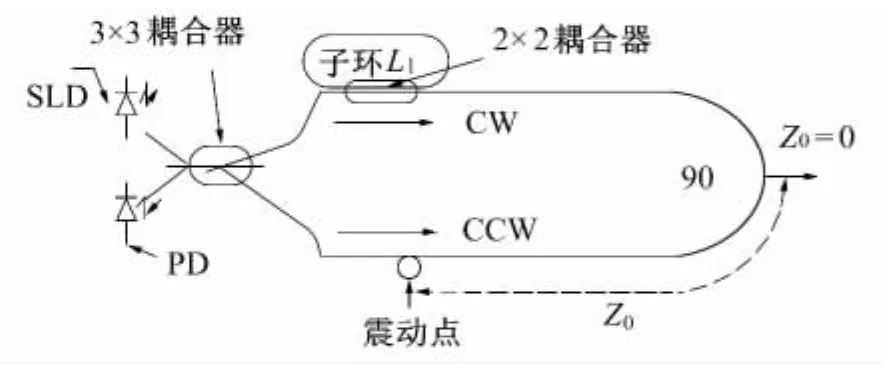
图1 分布式震动传感系统结构Fig.1 Distributed vibration sensor system
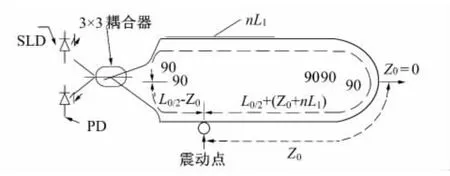
图2 通过子环n次等效传感系统结构Fig.2 Equivalent sensor system through the sub-ring n times
因为被2×2耦合器分成的两束光经过的光路径相似,经过的子环光纤的次数相同,所以在3×3耦合器相遇时会产生干涉[7,8]。
2 光纤定位理论分析
SLD光能量可以表示为I,因为3×3耦合器的-3 dB效应,顺时针和逆时针方向的光束强度都是因为震动位置是在中心点(Z0=0)的两侧,它引起顺时针和逆时针两光束产生相位差θ(t)。3×3耦合器引入了一个的相位差[10]。因为CW和CCW光束都会通过2×2耦合器n次,所以CW和CCW在传感光纤中的传输光强都是当光源遇到被2×2耦合器分离相同次数(n次)的两束光时,因为两束光经过震动点的位置不同而产生干涉,传感器输出功率的幅值是但由于震动点不同,会引起变化的相位差,经过n次分离的传感器输出的功率值设为Pn(τ),可以表示为

其中

使用DC(Direct Current)滤波器,AC(Alternate Current)原件的输出为

假设θ(t)=Acos(2πft),这里幅值A和震动频率f完全作用于输出功率。如果的相位差和θ(t)的值足够小,AC光源就拥有很好的线性,可表示为

三角函数可以等效为

随着τn的变化,传感器输出有所改变,其范围受震动频率和位置的影响。
P0(τ),P1(τ),P2(τ)可等效为

其中P0(τ),P1(τ),P2(τ)分别为光束经过2×2耦合器分离0,1,2次的输出功率。

设相对强度分别为D1=4P1/P0,D2=16P2/P0,即

则

可见z0计算依赖于不同数值,但却与输出强度P0(τ),P1(τ),P2(τ)相关。
3 数值仿真及分析
如图1所示,在实验室建立了检测系统。使用PZT(Piezoelectric)相移作为信号源,频率和幅值分别为100 Hz和100 mV。传感光纤长度为25 km,子环长度为2 km。这里,T是光源的周期时间,n是光束通过子环的次数。
n=0时,输出信号P0(τ);n=1时输出信号P1(τ);n=2时输出信号P2(τ)。下面通过仿真证明震动定位可以实现。由式(9),式(10),可以得到输出强度D1和D2随频率变化的曲线(见图3和图4)。
将得到的D1,D2应用式(7)和式(12)会得到震动的位置,不同频率混合却有相同的定位结果,所以系统定位点很准确。
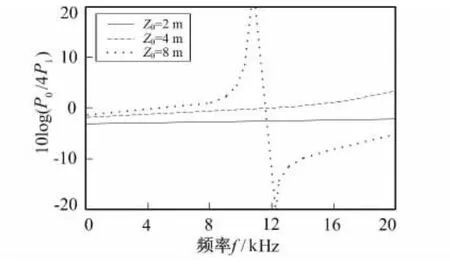
图3 不同震动点D1随频率变化值Fig.3 Different vibration D1varies with frequency value
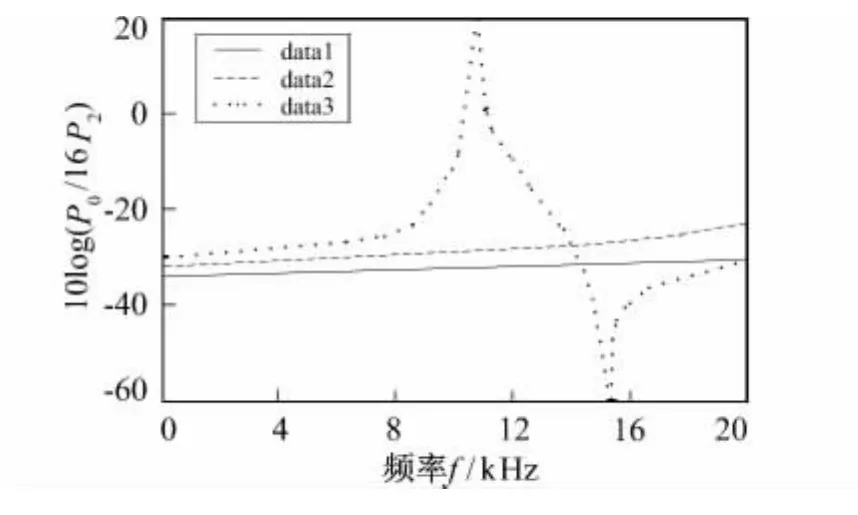
图4 不同震动点D2随频率变化值Fig.4 Different vibration D2varies with frequency value
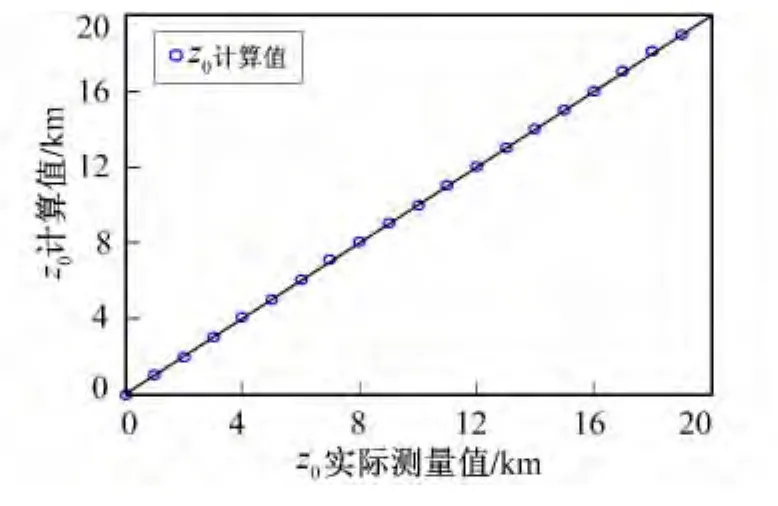
图5 z0计算值与实际测量值的比较Fig.5 z0calculated values compared with the actual measured value
图3展现了在不同给定信号频率下,同一个震动点的 P0/4P1,图 4展现了 P0/16P2的仿真图形。data0,data1,data2 分别代表了 z0=0,1,2 km 时在不同给定信号频率下,同一个震动点的P0/16P2。实际系统中通过示波器观察得到P0,P1,P2的值,做成比例与仿真的图形相比较即可得到运算出的z0即震动点位置。
图5给出了实际测量震动点位置与计算仿真位置的比较图。由图5可见,实际震动点取1,2,3,…,20 km时,计算值z0(图5中离散数值)基本等于该值,大致与实际震动点在一条直线上,误差最大在2‰左右,对被困矿工的快速救援没有影响。
4 结语
笔者设计了基于子环分布式光纤定位的矿井救援系统,在矿井救援系统中,大范围震动检测可以通过加入一个2×2的耦合器实现。通过理论分析和数值分析,验证了该系统可检测到发生在光纤环上震动的幅值和位置,定位精准性较高。该系统设置简单,易于在井下的复杂背景下实现。在矿难发生时,该系统可以很精准地通过矿工敲动地面或巷道壁得到震动信号,检测到矿工的具体位置,为矿难援救提供了科学依据。
[1]PAUL R HOFFMAN,MARK G.KUZYK.Position Determination of an Acoustic Burst along a Sagnac Interferometer[J].Journal of Lightwave Technology,2004,22(2):494-498.
[2]TAN Jing,CHEN Weimin,ZHU Yong.The Monitoring System and the Analysis of Locating Theory for Pipeline Leakage Detection Based on Single Distributed Optical Fiber Sensor[J].Acta Photonica Sinica,2006,35(2):228-231.
[3]TATSUYA OMORI,KEN-YA HASHIMOTO,MASATSUNE YAMAGUCHI.A Position-Detectable Optical Distributed Vibration Sensor Using an Additional Sub-Loop[J].IEEE,2004,11(2):583-586.
[4]STUART J RUSSELL,KEITH R C BRADY,JOHN P DAKIN.Real-Time Location of Multiple Time-Varying Strain Disturbances[J].Journal of Lightwave Technology,2001,19(2):205-213.
[5]BINU S,MAHADEVAN PILLAI V P,CHANDRASEKARAN N.Fiber Optic Displacement Sensor for the Measurement of Amplitude and Frequency of Vibration[J].Optics& Laser Technology,2007,39(1):1537-1543.
[6]BAKAR A A A,JAMALUDIN M Z.A NewTechnique of Real-Time Monitoring of Fiber Optic Cable Networks Transmission[J].Optics and Lasers in Engineering,2007,8(45):126-130.
[7]MOERMAN W,TAERWE L,DE WAELE W.Measuring Ground Anchor Forces of a Quay Wall with Bragg Sensors[J].Journal of Structural Engineering,2005,131(2):322-328.
[8]HOFFMAN P R,KUZYK M G.Position Determination of an Acoustic Burst along a Sagnac Interferometer[J].Lightwave Technol,2004,22(12):494-498.
[9]任凤双,任萍,郭铁颖.光纤无线电技术中的关键问题研究[J].吉林大学学报:信息科学版,2012,30(2):138-143.REN Fengshuang,REN Ping,GUO Tieying.Analysis of Key Problems in Radio over Fiber Technique[J].Journal of Jilin University:Information Science Edition,2012,30(2):138-143.
[10]张华,宋正勋,石云,等.基于超宽带的 TOA定位技术研究[J].吉林大学学报:信息科学版,2008,26(1):106-110.ZHANG Hua,SONG Zhengxun,SHI Yun,et al.Research of TOA Ranging Teehnology Based on UWB[J].Journal of Jilin University:Information Science Edition,2008,26(1):106-110.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
奥秘(2021年3期)2021-04-12
科学大众(2020年12期)2020-08-13
电子制作(2018年23期)2018-12-26
水电站设计(2018年1期)2018-04-12
中国公路(2017年18期)2018-01-23
光学精密工程(2016年6期)2016-11-07
红领巾·探索(2014年1期)2015-03-16
西安建筑科技大学学报(自然科学版)(2014年4期)2014-11-12
