基于虚拟样机仿真的经编机机构动平衡研究
2014-01-13 05:07张建兵韦海龙樊腾飞张大伟赵加洋
纺织报告 2014年12期
黄 骏 张建兵 韦海龙 樊腾飞 张大伟 赵加洋
(常州市润源经编运用工程技术研究中心,江苏常州 213000)
基于虚拟样机仿真的经编机机构动平衡研究
黄 骏 张建兵 韦海龙 樊腾飞 张大伟 赵加洋
(常州市润源经编运用工程技术研究中心,江苏常州 213000)
经编机运行过程中,由于各部件本身所具有的质量在运行状态下产生的惯性作用,使得机器运行过程中产生很大的振动力,直接影响经编机的高速运行性能。为此,基于虚拟样机技术,并借助Solidworks和ADAMS软件建立了经编机的虚拟样机模型,对机器在配重块不同材料及不同大小时的运行过程进行了动态仿真,得出了对机构总质心位移及基座转动副处受力的影响规律,并就减小机器振动力提出了方法。
经编机;振动力;虚拟样机;配重块
在经编机在运转过程中,除受到外载荷的作用外,还受到其各部件本身所具有的质量和转动惯量在运动状态下所产生的惯性作用,机构的质量分布越不均,机器转速越高,这种惯性作用会迅速增加,使机器产生很大的振动力,其不仅使构件运动中摩擦力和构件内应力增大,而且是机器产生振动、噪音和疲劳等现象的主要原因,其结果大大影响了机构的运动和动力性能。
过去的动平衡研究,一般都是通过建立各个构件之间的解析关系,通过编程来求解,这类方法适于解决仅含结构简单,规则构件的简单机构的动平衡。
本文以研究中心某高速经编机为建模原型,以虚拟样机仿真学为基础对整机的动平衡进行研究。
1 机构振动力及其平衡
机构振动力是反应和度量机构在运动过程中由于各构件质量产生惯性力作用的重要指标,其大小为构件各惯性力的总和[1~4][11]。

式中mi为各构件质量;rsi为各构件质心位置在固定坐标系中的向量;n为活动构件数;构件惯性力Fs又称为机构振动力。对于做周期运动的结构来说,要完全消除惯性力的影响,使得振动力完全平衡的充要条件是

其中C为常量,式(2)表明机构振动力完全平衡的条件是整个机构总质心静止不动,从而达到机构振动力的完全平衡,配重法或质量重新分布正是根据这一思想而产生的简单、有效的平衡方法。
2 整机虚拟样机模型建立
本研究机型为某高速机,其主传动通过曲轴传动实现,通过在曲轴正对两侧轴肩上装配重块来对整个机构进行平衡,每一段曲轴上有6个配重块,其中2个为槽针配重块、2个为针芯配重块、2个为沉降配重块。取一段曲轴为研究对象,当槽针处于最低点时,槽针配重块、针芯配重块及沉降配重块在曲轴上的安装如下图1所示,整机ADAMS中的虚拟样机模型如下图2所示[5~6]:

图1 原配重块及安装位置
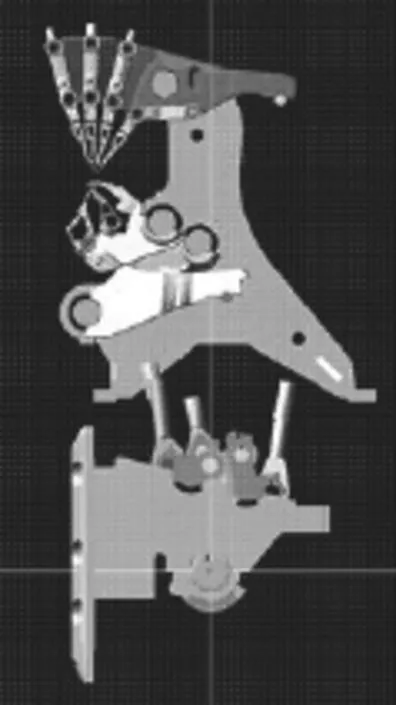
图2 整机虚拟样机Model1
3 机构动平衡分析
3.1 有无配重块时比对分析
动平衡的主要目的是消除由于惯性引起的振动力,由上分析,振动力的平衡一般是使机构总质心静止不动或总质心位移变化平缓。所以先分析当原配重块存在以及去掉配重块后机构的质心输出位移以及对基座受力的影响。配重块的材料为Q235-A,输出的质心位移为曲轴、配重块、槽针梳栉主连杆、针芯主连杆及沉降主连杆的总的质心位移,仿真中设置机器转速为2000r/min,如下
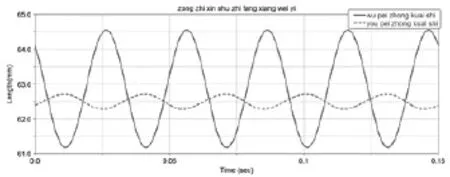
图3 总质心竖直方向位移

图4 总质心水平方向位移

图5 基座转动副处竖直方向受力

图6 基座转动副处水平方向受力
由以上仿真可见,原机构通过增加配重块,使机构竖直方向质心位移变的非常平缓,竖直方向基座受力最大减少1196N,水平方向质心位移变的较为平缓,水平方向基座受力由接近幅值为880N的正弦规律受力变为有波动的受力,避开基座承受正弦规律的受力,可防止基座的疲劳破坏。
同时可看出总质心水平方向位移还可通过优化配重块有使其进一步变平缓的空间。
3.2 配重块不同材料时对比分析
配重块一般使用的材料为Q235-A,以下研究在保持配重块原大小和安装位置不变的情况下,分别设置配重块的材料为Q235-A、QT400、45及LY12,研究配重块不同材料时对机构总的质心位移及基座受力的影响,为配重块的材料选择提供依据。
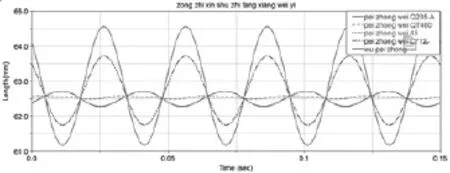
图7 配重块不同材料时总质心竖直方向位移

图8 配重块不同材料时总质心水平方向位移
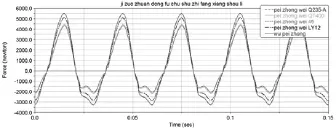
图9 配重块不同材料时基座转动副竖直方向受力
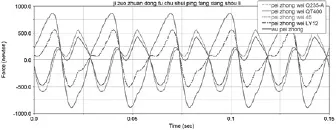
图10 配重块不同材料时基座转动副水平方向受力
由以上仿真可见,当配重块采用密度较小的材料LY12时,整个机构的平衡效果很不好,机构质心位移及基座处受力都会产生很大的波动,且变化趋势与无配重块时一致,所以实际平衡中不易采用密度较小的材料来进行平衡。
当配重块材料为Q235-A及45时,由于两种材料的密度相差很小,平衡后机构质心位移曲线及基座受力曲线基本重合,机构平衡后的效果基本一致,所以实际平衡中配重块应采用加工更容易、价格更低廉的材料更能降低成本。
当配重块材料为QT400时,平衡后机构质心的竖直方向位移接近于水平直线,这也是机构平衡当中比较理想的平衡状态,机构质心的水平方向位移同采用Q253-A及45时相比变化更平缓,且基座转动副处水平方向受力明显减小。所以采用QT400机构能取得更好的平衡效果。
3.3 配重块不同大小时对比分析
当配重块材料为Q235-A、配重块安装位置为原位不变时,改变配重块大小,在不同配重块形状下对机构的动平衡效果进行研究。以下配重块大小的改变是基于原配重块大小的基础上,对配重块由小到大依次改变,其中:修改配重块1 〈修改配重块2 〈原配重块;修改配重块4 〉修改配重块3 〉原配重块。
由于要在其它所有零部件及仿真环境相同情况下对不同配重块下的整体机构进行对比仿真分析,所以先把原配重块整机模型转换到ADAMS中生成Model1,再把逐渐改变配重块后的整机模型转换到ADAMS中分别生成Model2、Model3、Mode4、Model5,然后分别从Model2、Model3、Mode4、Model5中导出新修改的配重块,然后再将其逐次导入Mode1模型中进行配重块的替换。

图11 修改后配重块1

图12 修改后配重块2

图13 原配重块

图14 修改后配重块3
图15 修改后配重块4

图16 不同配重块时总质心竖直方向位移
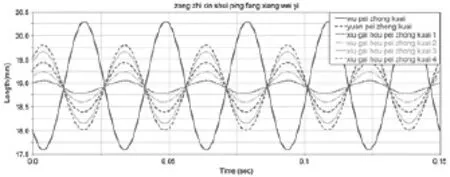
图17 不同配重块时总质心水平方向位移

图18 不同配重块下基座转动副竖直方向受力

图19 不同配重块下基座转动副水平方向受力
由以上仿真可见,在配重块材料为Q235-A不变,当在原配重块基础上配重块逐渐增大时,机构总质心竖直和水平方向的质心位移变化越来越剧烈,基座转动副处水平方向受力明显增加,所以增大配重块的方法不能获得好的平衡效果。
当配重块在原配重块基础上减小为修改后配重块2时,机构总质心的竖直方向位移变化非常平缓,接近于直线,机构总质心水平方向位移较原配重块也变化更为平缓一些;当配重块继续变小为修改后配重块1时,总质心的竖直方向位移又开始出现波动,且比修改为配重块2后的机构总质心竖直位移波动大,但修改为配重块1后总质心水平方向位移比原配重块及其它修改配重块后机构质心水平方向位移都平缓,所以说明在原配重块基础上减小配重块可以更好的平衡机构,但一定要适当减小,同时使机构总质心竖直和水平方向位移都能变化的非常平缓。
4 结论
本文针对经编机实际高速运行过程中振动力很大,影响经编机高速运行性能的的特点,以及传动动平衡研究只适于解决结构简单、构件规则的问题,
本文采用虚拟样机技术对某经编机整机进行了动平衡研究,并得出了以下结论:
4.1此机型通过在曲轴上加配重块,使机构总质心竖直和水平方向位移变平缓来对机构进行动平衡,减小振动力;
4.2在原配重块大小和安装位置不变情况下,配重块材料改为QT400时机构能取得更好的平衡效果;
4.3在原配重块基础上配重块适当减小,机构能取得更好的平衡效果。具体配重块减小到多少,需同时保证机构总质心竖直和水平方向位移都运动很平缓,还需要进一步研究优化。
[1] MARKS R,ROBINSION A T C.Principles of Weaving [M]. Manchester: The Textile Institute.1976:5972.
[2] 余跃庆,古 英.弹性机构动力平衡的有效新方法.机械科学与技术.1998,l7(1):14.
[3] 岳士岗.柔性连杆机构的震动力优化.北京工业大学学报.1994,20(4):9196.
[4] 方 同,薛 璞.振动理论及应用.西安:西北工业大学出版社.2004.
[5] 刘小平,郑建荣,朱治国等.ADAMS与Solidworks之间的图形数据交换研究.机械工程师.2003(12):2628.
[6] 沈 毅,高大牛,刘春雷.基于ADAMS的GT421型多臂机机构动态仿真. 纺织学报.2012(8):119-123.
[7] 张社民,蔡书平,陈际红.平面连杆机构综合优化平衡的振动响应法.西安交通大学报.1995,29(10):6874.
[8] 陈立平,张云清,任卫群.机械系统动力学分析及ADAMS应用教程.北京:清华人学出版社.2005.
[9] 聂松辉,刘宏昭,曹帷庆.平面连杆综合动力平衡新方法.机械设计.199(7),3:47.
[10] 张社民,门宪平.平面机构综合优化目标函数加权系数的确定.机械科学与技术.1994(3):2630.
[11] 何亚银. 基于虚拟样机仿真的机构动平衡研究[D].西安:西北工业大学.2006.
[12] 宋少云,李世其.基于物理的虚拟样机建模技术的研究.交通与计算机.2005(3):41-43.
Dynamic Balance Research of Warp Knitting Machine Based on Virtual Prototype Simulation
Due to the inertia effect of the every part itself has a mass, the warp knitting machine will produce a large vibration force during operation, and directly impacts the high speed running performance of warp knitting machine. In this paper, the virtual prototype model of warp knitting machine was built based on the virtual prototype technology and the software of Solidworks and ADAMS. The machine dynamic running process was simulated while the balancing weight was at the different material and different size, the law of the mechanism total displacement and the stress of the revolute pair was obtained. The method was proposed to reduce the vibration force.
warp knitting machine; Vibration force; Virtual prototype model; Balancing weight
TS183.3
A
投稿日期:2014-11-17
猜你喜欢
设备管理与维修(2022年24期)2022-02-08
一重技术(2021年5期)2022-01-18
防爆电机(2021年2期)2021-06-09
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
广东石油化工学院学报(2016年6期)2016-05-17
河北地质(2016年1期)2016-03-20
中国纺织(2015年7期)2015-09-07
组合机床与自动化加工技术(2014年9期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01