
用DGPS双天线系统校验定位辅助设备的方法探讨
2014-01-13 01:44伍习军赵戌未王树林
海洋石油 2014年3期
伍习军,赵戌未,王树林
用DGPS双天线系统校验定位辅助设备的方法探讨
伍习军,赵戌未,王树林
(中国石化集团上海海洋石油局第一海洋地质调查大队,上海 201208)
随着GPS技术的快速发展,使用DGPS定位的精度越来越高,这就为物探船上定位辅助设备的精确校准与校验提供了可能。通过对发现六号物探船定位辅助设备的校准与校验,初步形成了一套比较可行的作业方法。此文结合校验方法及其可行有效性分析,详细阐述了校验方法,并试图对校验误差来源进行探讨,以期提高对定位辅助设备校准与校验的精确度。
GPS;校验;物探船;定位辅助设备
由于多缆物探船拖带的电缆长(8至10千米甚至更长)、电缆数多(12缆、16缆甚至更多),为了确保物探作业所获资料的精度与可靠性,必须有效地获取地震电缆与震源点的位置,而这些位置的获取及其精度与可靠性的保证,离不开物探船上满足精度要求的电罗经、RGPS等定位辅助设备的连续正常工作,所以定期对这些定位辅助设备进行校验是很有必要的。根据相关国家(行业)标准与规范,按以往的惯例,对物探船上的电罗经、RGPS等定位辅助设备的校验常采用先建立校验场(测定基线与基准点3个)再用光电测距与测方位的方法。这也是一种常规通用的方法,但该方法要求校验场的基点与物探船的船首与船尾中心点通视,特别是当多缆物探船在茫茫大海上施工作业时尤显无能为力。由于发现六号船尚处于整船建造完工收尾阶段,船体较高,所停靠的码头周边没有合适的位置用于建立校验场的基点。在此条件下,考虑采用DGPS双天线来校验该船的电罗经、RGPS等定位辅助设备,其方法就是通过同时观测安装在船头与船尾中心的DGPS天线位置坐标,通过一系列的运算求解出两个天线点的距离与方位,以这两组数据为参考,对同时观测的电罗经数据和RGPS尾标的数据进行比较与评判,而完成对电罗经与RGPS尾标的校验,简称为DGPS双天线校验法。
1 方法的可行性分析
从数学与测量学的角度来说,只要知道两个点的坐标,通过简单的计算与收敛角的改正,就可以求解出该两点连线的方位角度;获取未知点的坐标,不外乎两种方法,其一是利用已知的控制点(两个或两个以上的点)通过测距与测量方位来解算得出所观测点的坐标(未知点的坐标),这也就是常规的光电测距与测方位校验法的理论基础;其二就是目前用得非常广泛的直接采用DGPS来给未知点定位(观测坐标)的方法,随着科学技术的发展,现如今,差分GPS普遍采用了相位差分的模式,比较以往的伪距差分GPS在定位的精度与解算的速度以及数据的可靠性方面均得到了很大的改善,有关GPS及DGPS的原理与运用[1],很多书籍均有介绍,这里不再累牍。现在,用于工程施工的DGPS仪器,其单点动态定位精度已经能达到厘米级,如图1所示,当相距50 m的两天线位置,相互偏离0.2 m时,两天线所在位置点的方位角度偏差为0.229 2 °;当相距50 m的两天线位置相互偏离0.1 m时,两天线所在位置点的方位角度偏差为0.114 6 °。可见,采用高精度(厘米级)DGPS的双天线法来校验电罗经、RGPS等定位辅助设备 (定向精度一般为0.5 °、0.2 °)是可行的。
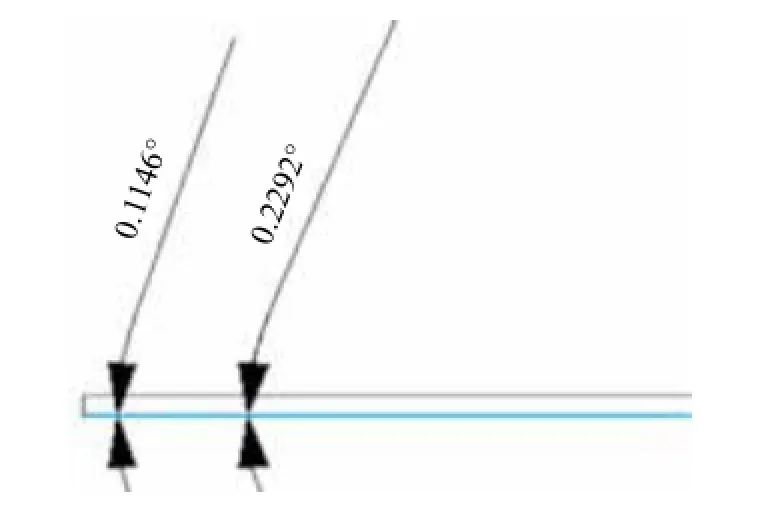
图1 角度偏差比对
2 方法的实施细则
2.1准备工作
(1)DGPS仪器选用:选用两套高精度的DGPS仪器,其单点动态定位精度尽可能达到厘米级,当然是精度越高越好、性能越稳定越好,并做好相应的检验与检定。
(2)DGPS天线的安装:其中一台DGPS天线(主DGPS天线)安装在船舶驾驶台的桅杆上或船头的前甲板中部,在后甲板上层的尾部中间附近位置安装另一台DGPS天线(辅DGPS天线),安装时应确保两台DGPS天线的连线方向与船舶龙骨线即船艏向保持平行,亦即主、辅DGPS天线的位置应在船舶龙骨线的同一侧且偏离船舶龙骨线的距离相等(图2)。
(3)精确测量出RGPS主台位置相对于主DGPS天线位置的横偏距X与纵偏距Y。在校验RGPS时,其尾标应放在辅DGPS天线的正下方并量取两者的高度差值,同时,量取出RGPS的主台处位置与尾标处位置间的高度差值。
(4)电罗经至少运转24 h、船体稳定地靠在码头至少2 h后,才能开始校准;校准时应确保各时间(测量时钟、导航系统时钟,与GPS时钟)同步,并将数据记录齐全。
本次发现六号物探船定位用的DGPS为C-NAV 3050G定位设备,该设备是目前精度最高的一种相位差分GPS,其标称精度为:水平位置<15 cm,垂直位置<30 cm;船上拥有的两台C-NAV 3050G定位设备已通过上海权威计量校准部门检验。
2.2校准
2.2.1 电罗经的校准
(1)启动运行导航系统,系统内的罗经校正值设置为0,电罗经的纬度补偿设置为基准点的纬度,速度补偿设置为0,用导航系统实时记录电罗经的读数和时间。
(2)与此同时,用导航系统实时记录主、辅DGPS输出的坐标数据,根据船舶所停靠的位置,选用合适的坐标系(如WGS-84)、中央经线(如123 °)、平面坐标的投影方式(如高斯投影)等。
(3)在60 ~ 90 min内采集测量值。
(4)按目前规范,应将船调向180 °、稳定2 h后,重复采集60 ~ 90 min的测量值。
(5)从导航系统记录的数据文件中提取出有用的相关数据,包括时间、电罗经读数、主DGPS天线点处的平面坐标、辅DGPS天线点处的平面坐标。
(6)对完整的记录结果进行计算处理,并做出统计分析,做出电罗经的稳定性评价。
2.2.2 RGPS的准静态校准
(1)启动RGPS系统、电罗经、主辅DGPS、综合导航系统,各系统内的校正值均设置为0。
(2)检查RGPS输出类型。
(3)当仪器均工作正常了后,导航系统同时记录电罗经和RGPS数据以及主、辅DGPS输出的坐标数据,每个尾标观测时间不少于15 min。
(4)从导航系统记录的数据文件中提取出有用的相关数据,包括:时间、RGPS数据(距离d与方位角α)、电罗经读数、主DGPS天线点处的平面坐标、辅DGPS天线点处的平面坐标,对采集的数据进行统计分析,确定系统的稳定性以及DGPS系统的、电罗经的校正值。
(5)使用记录的数据计算RGPS的测量误差。
(6)编写校正报告,所有的原始记录数据应作为报告的基础部分。
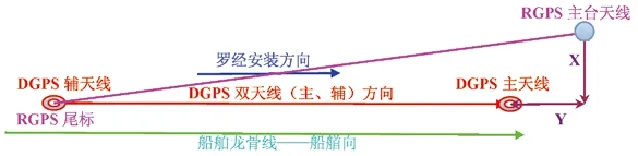
图2 地震采集定位辅助设备校准示意图
3 方法的实证分析
根据以上的分析论证,同时也为了尽快有效地完成对发现六号物探船的电罗经、RGPS等定位辅助设备的校验,本单位组织相关人员于2013年9月22日上午开始对该船的定位辅助设备进行校验,当天就对该船上的两套电罗经(单个方向)及部分RGPS尾标完成了校验,如图3所示,为两台C-NAV 3050G现场采集数据所获得的离散图。
从离散图可以看出,两台DGPS离散性非常好,位置也比较稳定,为高精度地校验电罗经与RGPS提供了技术支撑。表1为主、辅电罗经校验成果表(一部分),从表中可以看出,主、辅电罗经存在一个偏差,这应该是罗经安装固定时产生的。
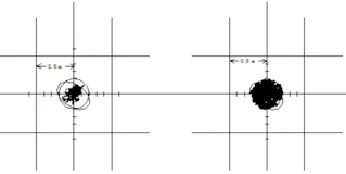
图3 主(左图)、辅(右图)
由于系首次采用该方法,于2013年10月24日至25日在崇明上海船厂码头,再次对发现六号的电罗经(两个相反方向)进行了校准和检查,结果见表1和表2。
根据测得的结果,可以得出如下结论:
(1)主、辅电罗经工作性能稳定可靠(虽然船体牢牢地固定在码头边,但随着潮水的波动,会有轻微的摆动,电罗经的读数也跟随有很小的变化,三套系统所测得的船艏向通过连续观测也没有出现大的跳变值)。
(2)本次测定的罗经偏差值为:主罗经为0.065 °(罗经东偏),辅罗经为-0.055 °(罗经西偏);考虑到通过DGPS双天线得出的船艏向也有一定的误差,而罗经偏差值又比较小,所以,可以对电罗经测定的船艏向不做补偿。
(3)综合分析差值的均方根和所有校准值的标准偏差(<0.1°)可以得出,采用DGPS双天线法来校验罗经是完全有效可行的;同样用于校验RGPS尾标也是可行有效的。

表1 电罗经校验成果
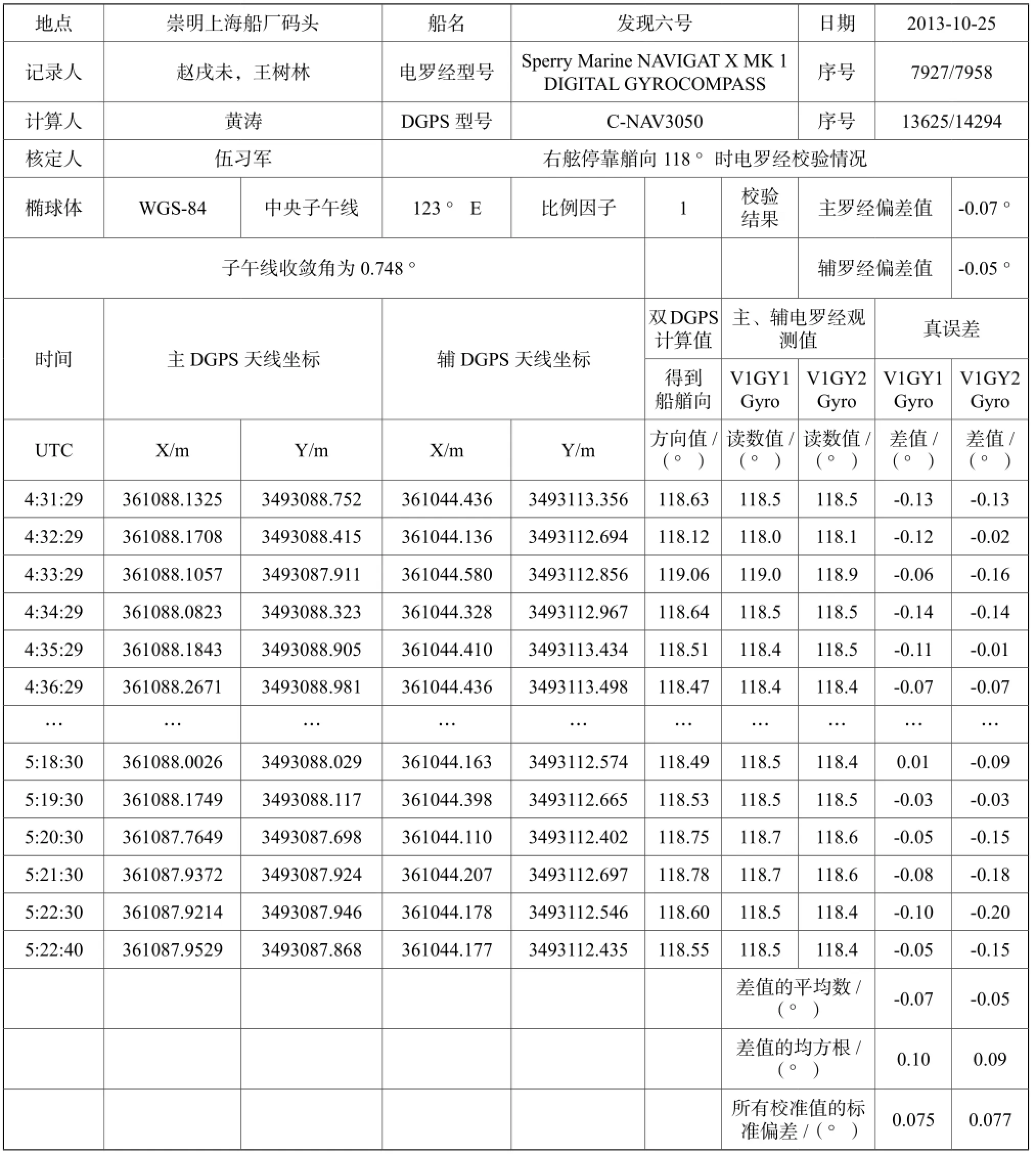
表2 电罗经校验成果
4 方法评价
常规通用的用光电测距与测方位的方法来校验电罗经与RGPS尾标,误差的主要来源是光电测量(距离与方位角)系统本身的测量误差以及观测置于船头与船尾中点上的激光棱镜的时间有一个间隔,而且该方法还受到作用距离短、气候干扰、校验场选址与建立困难等诸多局限性,特别是观测置于船头与船尾中点上的激光棱镜的非同时性无法避免,使得在用常规方法校验时船必须稳定地固靠在码头边,停靠在海边码头的物探船总会受海水潮涨潮落的影响有些摆动,这一因素给用常规方法对物探船定位辅助设备的校验带来一定的误差。而采用DGPS双天线校验法,由于两天线点的距离与方位角求解用的坐标数据是根据GPS时间来同步的,同步的精度达到1 s以内,这样,一方面有效避免了常规校验方法在观测两目标点时的不同步性,提高了校验的精度,另一方面扩大了该方法的使用范围,因为只要有两套已经校验的高精度DGPS(单点定位精度达到厘米级),从理论的角度来说,就可以在任何时候任何海域对船上的定位辅助设备进行校验[2],即使在物探船正常作业时亦可以进行,这对多缆物探船来说是非常有实用价值的,一方面,可以提高工作效率,另一方面,可以极大地降低成本。考虑到电罗经方向跟踪的滞后性与DGPS点位坐标解算的时效性,在进行校验时,物探船舶还是应处于锚泊状态,状态越稳定越好,当然,用于校验的两DGPS天线安装位置在保证两天线点的连线与船艏向一致的前提下间距越远越好。
[1] 王广运,郭秉义,等.差分GPS定位技术与应用[M].北京:电子工业出版社,1996.
[2] 伍习军,童辛涛,方志远.GPS在海域钻井平台拖航就位中的应用[J].海洋石油,2004,24(2):113-116.
Discussion of the DGPS Dual Antenna System Method for Checking the Auxiliary Positioning Devices
WU Xijun, ZHAO Xuwei, WANG Shuling
(No.1Marine Geological Investigation Party of Shanghai Offshore Petroleum Bureau,SINOPEC,Shanghai201208,China)
with the rapid development of GPS technology, the accuracy of DGPS positioning becomes higher and higher, which makes it possible for precise calibration and verification of positioning auxiliary device in geophysical prospecting ship. Through calibration and verification of the auxiliary equipment of the Discoverer Six, a set of feasible operation method for calibration and verification of the auxiliary equipment have been developed. In this paper, calibration method and feasibility of calibration and verification have been described in detail, and error sources during calibration and verification are discussed in order to improve the calibration and verification accuracy of positioning auxiliary equipment.
GPS; check; geophysical vessel; positioning auxiliary devices
P715.4+1
A
10.3969/j.issn.1008-2336.2014.03.109
1008-2336(2014)03-0109-06
2013-12-12;改回日期:2014-02-17
伍习军,男,1968年生,高级工程师,1992年毕业于武汉大学电仪专业,从事海洋物探工作。
E-mail:wuxijun@sopgc.com。
猜你喜欢
石油物探(2022年6期)2022-12-03
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
智能城市(2018年8期)2018-07-06
中国铸造装备与技术(2017年6期)2018-01-22
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
物探化探计算技术(2016年6期)2017-01-12
网络安全和信息化(2016年9期)2016-11-26
云南地质(2015年3期)2015-12-08
