
基于DSP的混合动力汽车永磁同步电机的矢量控制系统
2014-01-02 08:10夏若飞祝龙记
中国工程科学 2014年8期
夏若飞,祝龙记,朱 红,陆 康
(安徽理工大学电气与信息工程学院,安徽淮南232001)
1 前言
由于当今社会所面临的能源和环境双重压力,要求人类必须更加合理的利用能源,减少污染气体的排放,因此开发新能源汽车得到了全世界的关注[1]。到目前为止,电动汽车根据其能量来源可分为纯电动汽车、氢发动机汽车、混合动力汽车和燃料电池汽车。常用的电动汽车电机有:永磁同步电机、感应电机和开关磁阻电机[2]。由于混合动力汽车采用电动力源和发动机双重装置,所以可显著提高续航里程。传统的混合动力汽车启动时转速响应和静态特性不是很好,因此还有待于提高。
相对于开关磁阻电机和感应电机,永磁同步电机的转矩较大,结构简单,低损高效,调速性能较好[3]。高性能的永磁同步电机控制方法主要有直接转矩控制和矢量控制。直接转矩控制是直接在定子静止坐标系下,通过检测到的定子电压和电流,计算与控制电动机的磁链和转矩,获得高动态性能的转矩[4]。而矢量控制是将交流电机通过坐标变换等效成直流电机,用直流电机的控制方法来控制交流电机,但是永磁同步电机的控制系统会相对复杂一些。
本文采用双闭环控制混合动力汽车的永磁同步电机,设计整个系统,并且通过实验结果验证了系统的可靠性。
2 控制原理
电动汽车永磁同步电机驱动控制系统结构图如图1所示,主要由电池、三相鼠笼型永磁同步电机、三相电压型PWM逆变器、微处理器和伺服系统构成。采用的30 kW三相四极的3 600 r/min的水冷和风冷永磁同步电机是与312 V的电源匹配的。伺服系统主要包括冷却系统和指示系统[5]。
按转子磁链定向的矢量控制基本思路是利用坐标变换,通过按转子定向的同步变换正交坐标系,得出等效的直流电动机模型,这样就可以使用对直流电动机的控制方法来控制磁链和电磁转矩,再反变换到三相坐标系的对应量,实施控制。
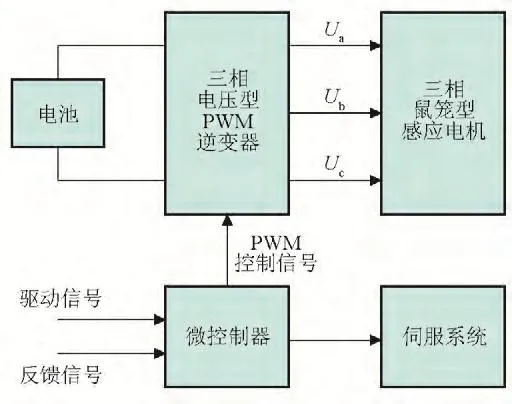
图1 电动汽车永磁同步电机驱动控制系统结构图Fig.1 The drive control system structure of permanent magnet synchronous motor
在图2中,ASR为转速调节器,AΨR为转子磁链调节器;ACMR为定子电流励磁构,内环为电流环,外环为转子磁链环或转速环,转子磁链给定与实际转速有关;ACTR为定子电流励磁分量调节器;FBS为转速传感器。对转子磁链和转速而言,均表现为双闭环控制的系统结构[6]。在额定转速以下时,转子磁链给定保持恒定;在额定转速以上时,转子磁链给定相应减小。将检测到的三相电流施行3/2变换和旋转变换,得到mt坐标系中的电流ism和ist。采用PI调节软件构成电流闭环控制,电流调节器的输出为电子电压给定值和,经过反旋转变换得到静止两相坐标系的定子电压给定值和,再经过 SVPWM 控制逆变器输出三相电压。

图2 定子电流励磁分量和转矩分量闭环控制的矢量控制系统结构图[7]Fig.2 The closed-loop control structure of stator current excitation and torque component of the vector control system[7]
3 数学模型
尽管永磁同步电机结构很简单,但由于其数据的数量庞大而且是非线性的,而且存在耦合关系,所以它的数学模型很复杂。如图3所示,A,B,C三相静止坐标系可以转换成α,β两相静止坐标系,而且a轴和α轴同向。若用M轴表示转子磁链ψ*r,则可以把α,β两相静止坐标系转换成M,T两相旋转坐标系。在同步旋转坐标系(M,T)中,三相鼠笼型永磁同步电机的电压方程可以用式(1)表示

图3中,静止的空间矢量is可以分解为沿M轴的励磁电流和沿T轴的转矩电流。永磁同步电机的磁链方程见式(2)

在式(1)、式(2)中,Rs是单位静止电阻;Rr是单位旋转电阻;Ls是单位静止电感;Lr是单位旋转电感;Lm是单位互感;p为积分算子;uM、uT分别为M轴和T轴的静止电压;im、it分别为M轴和T轴的旋转电流;iM、iT分别为M轴和T轴的静止电流;ωs为同步频率;ωr为旋转频率;ωs1=ωs-ωr,为相对频率;ψM是M轴的静止磁链;ψT是T轴的静止磁链;ψm是M轴的旋转磁链。

图3 电流和电压与旋转坐标系M,T以及静止坐标系a,b,c的关系Fig.3 The relationship among current and voltage,the rotating coordinate system M,T and stationary coordinate system a,b,c
从式(1)、(2)中,可以推断出旋转磁链ψ和转矩Te的公式
式(3)、式(4)中Tr=Lr/Rr为转子时间常数,p为极对数。
由式(3),式(4)可推得
可见,转矩Te取决于静止电流iM和iT。
4 仿真研究
为了验证在该矢量控制系统的控制下,永磁同步电机的性能,在MATLAB的环境下仿真,并做进一步的分析。
4.1 转速阶跃变化的性能测试
将负载设定为4.8 N·m,转速设定在5.8 s由50 r/min突增到100 r/m in,测得的相电流波形和转速曲线如图4所示。
4.2 负载阶跃变化的性能测试
将转速设定为100 r/m in,负载设定在5.8 s由空载突增到4.8 N·m,测得的相电流波形和转速曲线如图5所示。

图4 转速阶跃变化的相电流波形和转速曲线Fig.4 Phase current waveform sand speed curve when step changes of rotational speed

图5 负载阶跃变化的相电流波形和转速曲线Fig.5 Phase current waveform sand speed curve when step changes of load
图4表明,当转速发生突增时,电机的实际转速在0.05 s后就达到新的稳定状态,响应时间很短。电流波形表明在经过0.1 s以后也达到新的稳定,动态过程时间短,而且电流响应速度快,转速和电流的超调量都小。图5则表明,当负载发生突增时,电流波形的变化反映了转矩的变化。而且转速响应波动较小,动态性能较快。以上结果表明,该永磁同步电机的矢量控制系统具有很好的静态和动态性能。
5 结语
本文在传统的混合动力汽车基础上,采用了一种基于DSP的矢量控制方案。通过系统仿真和实验,结果表明系统能平稳的运行,改进的矢量控制系统的转速超调比先前有所减小,响应速度快,可以满足混合动力电动汽车对控制系统的要求,达到预期的设计目标,使永磁同步电机获得了快速的转速响应和稳定的静态特性。
[1] 陈晓丽.混合动力汽车电驱动控制系统研究[D].上海:上海交通大学,2008(5):1-2.
[2] 廖永衡,冯晓云,王 珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制[J].中国电机工程学报,2012,(18):106-112.
[3] 陈正龙.混合电动汽车能源总成控制器及驱动电机的矢量控制研究[D].湖南:湖南大学,2007(3):8-9.
[4] 陈 勇,张大明,姜丕杰.电动汽车用异步电机矢量控制系统仿真分析[J].系统仿真学报,2007,19(16):3761-3765.
[5] Enrique L,Carrillo Arroyo.Modeling and simulation of permanent magnet synchronous motor drive system[D].UM I:University of Puerto Rico Mayaguez Campus,2006(5):31-41.
[6] 聂晓华,肖倩华,刘建国,等.一种应用于电动汽车的异步电动机矢量控制方法[D].南昌:南昌大学学报(工学版),2013.
[7] 阮 毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2011.
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
防爆电机(2022年4期)2022-08-17
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
微特电机(2019年7期)2019-08-02
组合机床与自动化加工技术(2014年12期)2014-03-01
