
一种汽车防撞雷达多目标识别方法
2014-01-01 03:18蒋留兵许腾飞杨昌昱韦洪浪白云浩
现代雷达 2014年6期
蒋留兵,许腾飞,杨昌昱,韦洪浪,白云浩
(桂林电子科技大学信息与通信学院, 广西桂林541004)
0 引言
线性调频连续波(LFMCW)雷达具有结构简单、体积小、重量轻和良好的低截获概率性能等特点,特别适用于雷达成像、目标特性研究等领域[1]。在单目标情况下传统LFMCW雷达简单可行,而多目标环境下长常常由于错误的目标配对导致虚假目标的出现。
在雷达接收机产生的雷达中频信号中,不仅含有目标的回波信号,还含有雷达噪声信号和干扰信号,如邻近车道上的车辆、车道间的护拦 、路旁的树木以及空中和远处的建筑物等,这些都会对雷达系统形成干扰,导致雷达做出错误判断。如何实现在复杂环境下的多目标识别是制约其应用和普及的关键问题。为了解决虚假目标问题,国际上的学者通过大量的实验研究,已经逐渐达成共识,即:(1)要求防撞雷达必须具备测角能力,目标的方位角信息对于去除虚警是必不可少的;(2)设计出易于产生、抗干扰性能强的复杂雷达发射信号,配合以实时高效的信号处理和目标检测方法,以去除虚警。只有以上两点紧密结合起来,才能保证汽车防撞雷达的工作可靠[2]。
本文采用一种抗干扰能力强的改进型变周期三角波调频信号,配合以实时高效的信号处理算法以及目标检测算法,可有效剔除虚假目标,提高了多目标识别的准确性。
1 传统LFMCW防撞雷达原理和存在的问题
传统LFMCW雷达调频三角波波形如图1所示。

图1 线性调频连续波信号的频率和时间的关系
第n+1个周期的发射信号上扫频段可表示为

上面两式忽略了发射信号的初相。B为调频带宽;f0为发射信号在t=nT时的瞬时频率;A为发射信号的振幅;T为扫频周期。
假设在t=0时刻有一个距离为R0、速度为v的点目标正靠近雷达,则雷达的发射信号与目标的反射信号的差即差拍信号表示为:

如果在单目标环境下传统LFMCW雷达完全可以完成目标信息的探测与识别。但是在多目标环境下,假设有n个目标,那么对上扫频的差拍信号进行频谱分析可以得到n个谱峰,可分别表示为fa1,fa2,… ,fan,同理由下扫频的差拍信号可以得到n个谱峰:fb1,fb2,…,fbn。因为不知道上、下扫频谱峰的配对信息,所以共有n2种配对可能,其中只有n个真实目标,也就是说还有n2-n个虚假目标,如何排除虚假目标是我们需要面对的难题。
2 改进型变周期LFMCW防撞雷达
改进型变周期三角波波形如图2所示。
一个周期发射信号由两段具有相同带宽不同调频斜率的信号组成。这里设置t1、t2的作用是留给系统足够的时间进行信号调制发射,也便于后续的信号处理。

图2 改进型变周期三角波调频信号波形
根据上面推导出的fbb、fab表达式,在T1调频周期内,上扫频段第i个目标的频谱峰值的频率为

式中:i为整数,且 i∈[1,n];同理下扫频段第 j个目标的频谱峰值频率为

式中:j为整数,且 j∈[1,n]。将式(7)、式(8)代入式(5)、式(6)可得

由式(9)、式(10)可以看出,真实目标距离和速度与调频周期无关,而虚假目标距离和速度计算值与调频周期有关系。对于不同调频周期T1和T2虚假目标计算所得的目标距离和速度值不同,真实目标计算所得的目标距离和速度值相同。这就为变周期LFMCW雷达可以排除虚假目标提供了理论依据。
3 算法设计
为排除虚假目标,提高多目标识别能力,文献[3]提出了频域配对法,该方法是根据同一目标在上/下扫频段得到的频谱具有相同形状特点实现目标的配对。当多个不同目标回波信号具有相似幅度和频谱形状时,目标配对就会出现问题。为了减少杂波干扰,文献[4]提出了动目标检测(MTD)-频域配对法来实现配对。因为需要计算上/下扫频段得到的频谱峰值、宽度、信号能量以及频谱的相似程度等,所以计算量很大。上述两种方法配对的准则是回波的频谱特征相同,但基于频谱特征的多目标配对存在难以消除的多义性,当目标回波频谱出现重叠时,提取的频谱特征参数已不能反映目标的特征,导致多目标配对失败[5]。文献[6]提出采用变周期LFMCW雷达排除虚假目标,在理想环境下该方法非常有效,但是没有考虑复杂环境下的多目标识别问题。
综合以上的多目标识别方法,为了提高在复杂环境下多目标识别的准确度,同时考虑算法实现的复杂度。本文采用了改进型变周期LFMCW雷达进行目标识别。先采用MTD抑制杂波,简化目标环境,并进行恒虚警处理。根据同一目标在上、下扫频段的频谱以实际位置为对称轴的偏离,首先按多普勒通道是否相同对目标进行分组,这样可以减少后续目标配对的复杂度。代入式(5)、式(6)计算目标的距离速度组合。
如果满足一定误差范围内的距离速度则认为距离速度相等。这里需要考虑容差函数的建立,根据文献[7]中关于容差函数的建立,结合本文的特点,容差函数的推导过程如下:

如果计算出的v1k和v2k满足式(14),则认为相等。
对于多普勒通道相同的目标组合,先判断速度是否满足容差函数,若不满足则可省略距离容差函数判断,若满足则接着判断距离是否满足容差函数,只有都满足的情况下则能判断为真实目标。
图3为防撞雷达多目标探测信号处理流程图。

图3 汽车防撞雷达多目标探测信号处理流程图
若发射调频三角波周期为T1,则对采集的回波1的实部和虚部分别进行加窗处理,需要采集16个周期的回波1,对每个周期的回波数据先进行距离维FFT处理,然后进行速度维FFT处理。回波1数据的实部、虚部进行上述处理后取模得到模糊多普勒频率,这就相当于完成了一次 MTD,并进行恒虚警检测(CFAR)处理,简化了目标环境。回波2的处理过程和回波1基本相同,最后经过容差函数判断出真实目标。
4 硬件平台结构
图4为汽车防撞雷达系统硬件平台总体结构。汽车防撞雷达系统硬件平台包括射频发射接收部分、数据处理部分和电源部分。

图4 汽车防撞雷达系统硬件平台总体结构
射频发射接收部分包括雷达传感器和中频信号处理模块。雷达传感器是一种平面微带结构的K波段带VCO的雷达收发器。中频信号处理模块作用是放大接收的回波信号的功率,减小送入数据处理部分的信号动态范围,包括频域动态压缩电路和中频放大电路。
数据处理部分是系统的核心部分,包括模数、数模转换模块和中心控制处理模块。
图5为现场可编程门阵列(FPGA)中心控制模块,包括调制信号产生子模块、回波信号采集子模块、算法子模块以及控制子模块。
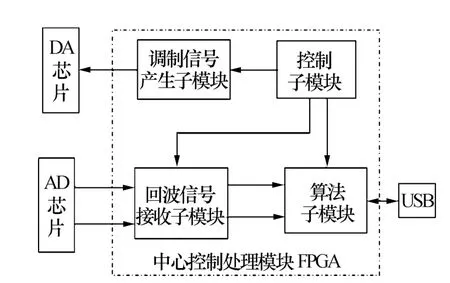
图5 FPGA中心控制模块结构
5 实测数据分析
实验环境为:将汽车防撞雷达系统固定在静止的实验平台上,与前方3辆目标车进行实验。本实验所有数据均通过QuartusⅡ自带的逻辑分析仪Signal Tap采集到的数据。
图6~图7为实测数据分析图。在进行速度维FFT处理之前,16个周期信号进行了数据重组,故MTD后的图为二维图。
图6 a)为回波1差拍信号MTD后的频谱图,图6 b)为回波2差拍信号MTD后的频谱图。
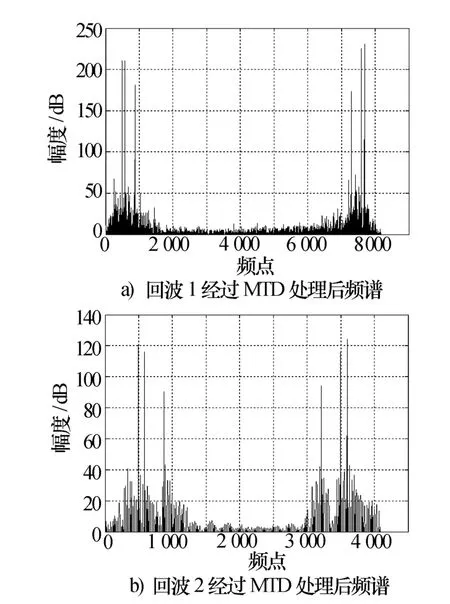
图6 回波信号经过MTD处理后频谱
图7 a)为回波1差拍信号CFAR后的频谱图,图7 b)为回波2差拍信号CFAR后的频谱图。

图7 回波信号经过CFAR处理后频谱
经过CFAR后,从图7可以看出有两个目标距离很接近而且都在一个多普勒速度通道内(速度通道的计算是用频点除以16,如果余数相等则为同一多普勒速度通道)。对于多普勒通道不同的那个目标进入容差函数计算后判断为真实目标,距离3为88 m,速度3为3.7 m/s。多普勒通道相同的两个目标有4种距离速度组合,经过容差函数判断后有两个组合满足容差函数,距离1为49.6 m,速度1为6.4 m/s,距离2为59.2 m,速度2 为6.4 m/s。
图8为本文所采用的改进型变周期LFMCW所识别出的目标位置、虚假目标位置和传统LFMCW雷达采用MTD-频域配对法所识别出的目标位置图。图中的虚假目标是经过MTD、CFAR和多普勒通道判断等处理后的识别结果,实际上还会更多。从图中对比可以发现传统LFMCW有虚假目标出现,而本文所采用的多目标识别算法则剔除了虚假目标,保留了真实目标。

图8 目标位置对比图
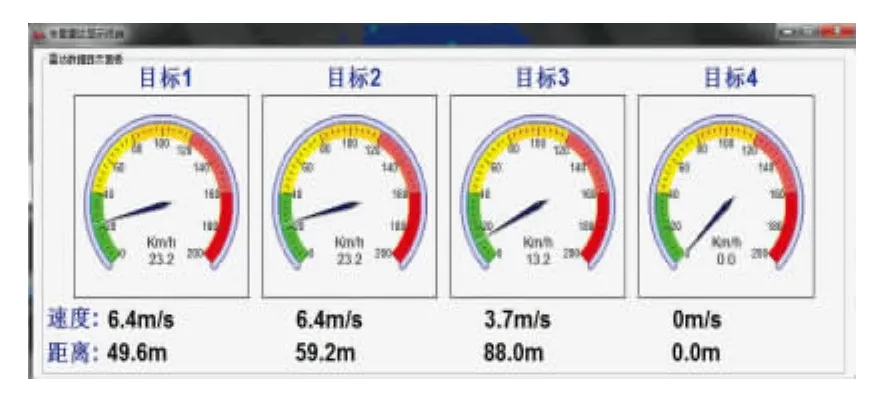
图9 采用改进型变周期三角波调频的上位机显示
实测数据分析和实验结果表明,改进型变周期LFMCW多目标识别方法可以在复杂环境中保留真实目标,排除虚假目标,准确实现多目标的识别。
6 结束语
本文在分析了频域配对法、MTD-频域配对法和变周期LFMCW雷达等多目标识别方法的基础上提出了一种改进型变周期LFMCW汽车防撞雷达多目标识别方法并在汽车防撞雷达硬件平台上实现了该方法。该方法综合了上述方法的优点,在复杂环境下,采用MTD结合CFAR简化目标环境,摒弃了频域配对法的计算量大和容易出现虚假目标的缺点,采用了可以去除虚假目标的变周期LFMCW雷达,并对扫频波形做了改进,采用了更容易实现的波形。实测数据分析和实验结果表明:该方法可以有效排除虚假目标保留真实目标,能够准确的探测前方目标车辆相对距离和速度信息。
[1] 张立志,汪学刚,向敬成.LFM-CW雷达的MTI技术[J]. 电子科学学刊,2000,(1):118-123.Zhang Lizhi,Wang Xuegang,Xiang Jingcheng.MTI technique in LFMCW radar[J].Journal of Electronics,2000,(1):118-123.
[2] 张建辉,刘国岁,顾 红,等.多斜率步进调频连续波信号在汽车防撞雷达中的应用[J].电子与信息学报,2002,24(2):232-237.Zhang Jianhui,Liu Guosui,Gu Hong,et al.Multi-slope stepped-FMCW waveform applied for automotive collision warning radar[J].Journal of Electronics & Information Technology,2002,24(2):232-237.
[3] 史 林,张 琳.调频连续波雷达频谱配对信号处理方法[J].西安电子科技大学学报,2003,30(4):534-538.Shi Lin,Zhang Lin.The signal processing based on the partner for frequency modulation continuous wave radar[J].Journal of Xidian University,2003,30(4):534-538.
[4] 杨建宇,凌太兵,贺 峻.LFMCW雷达运动目标检测与距离速度去耦合[J].电子信息学报,2004,26(2):169-173.Yang Jianyu,Ling Taibing,He Jun.MTD and range-velocity decoupling of LFMCW radar[J].Journal of Electronics &Information Technology,2004,26(2):169-173.
[5] 丁顺宝,刘 明.一种LFMCW雷达多目标距离-速度配对新方法[J]. 现代雷达,2011,33(5):9-11,16.Ding Shunbao,Liu Ming.A new method of joint range-velocity paring for LFMCW radar multi-targets[J].Modern Radar,2011,33(5):9-11,16.
[6] 徐 涛,金昶明,孙晓玮,等.一种采用变周期调频连续波雷达的多目标识别方法[J].电子学报,2002,30(6):861-863.Xu Tao,Jin Changming,Sun Xiaowei,et al.A novel method to identify multitarget by FMCW radar[J].Acta Electronica Sinica,2002,30(6):861-863.
[7] 吴 礼.近程毫米波LFMCW雷达多目标信号分析与处理方法研究[D].南京:南京理工大学,2008.Wu Li.Research on multi-target signal analysis and processing method for short-range millimeter wave LFMCW radar[D].Nanjing:Nanjing University of Science& Technology,2008.
猜你喜欢
能源工程(2021年5期)2021-11-20
空间科学学报(2021年6期)2021-03-09
小哥白尼(趣味科学)(2018年12期)2018-12-18
测控技术(2018年7期)2018-12-09
汽车工程师(2018年1期)2018-07-13
中国公路(2017年13期)2017-02-06
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
民用飞机设计与研究(2015年3期)2015-12-07
海军航空大学学报(2015年4期)2015-02-27
