
往复机械故障诊断转速测量硬件电路设计
2014-01-01 02:18王立勇徐小力
设备管理与维修 2014年1期
陈 浩 贾 然 王立勇 徐小力
(北京信息科技大学现代测控技术教育部重点实验室 北京)
往复机械具有结构复杂、工作条件恶劣、运行状态不稳定的特点,在往复机械故障诊断中,曲轴转速是最基本的参考信息,精确的测量曲轴转速对往复机械曲轴相位鉴别具有非常重要的指导意义。对往复机械转速测量方法和转速测量中的脉冲调理电路进行研究,旨在提高传感器调理电路在复杂环境下的抗干扰能力。为后续的转速采集系统提供可靠的曲轴转速信号。
一、转速测量原理
现有的转速测量方法主要包括基于霍尔型传感器转速测量方法、基于加速度计的转速测量方法和基于振动信号的转速测量方法。基于霍尔型传感器转速测量方法原理为:旋转部件转动时霍尔传感器和感应器件之间的距离会发生变化,导致传感器的磁场密度发生变化,从而引起霍尔电压的变化。测量系统采集到霍尔电压变化的周期或频率,进而计算出部件转速。
基于加速度计的转速测量方法原理为:加速度计测量旋转部件三维加速度,并计算得到向心加速度,由a=R(2πn)2得到部件转速。基于振动信号的转速测量方法原理为:采用一定的算法从旋转部件振动信号中提取出转速特征信号进而得到转速信息。
二、调理电路
信号调理电路主要实现将传感器输出的高电压方波转化为5 V方波,以满足单片机的工作电压,保证单片机不被损毁,同时实现信号的滤波处理。以下对比了3种信号调理电路,归纳总结了各种电路的工作特点。
1.稳压型信号调理电路
信号调理电路主要实现将传感器输出的高电压方波转化为5 V方波,以满足单片机的工作电压,保证单片机不被损毁,同时实现信号的滤波处理。稳压型调理电路原理图如图1所示,24 V转速脉冲信号从电阻左侧输入,施密特触发反向器(SN74HC14D)对输入脉冲信号进行整形,并输出5 V脉冲信号。
电路工作原理:当输入端电压为24 V时,稳压二极管被反向击穿,二极管负极电压稳定在4.7 V,此时芯片1管脚电平为高,经过逻辑取反以后,管脚2的电平转化为低电平;当输入端电压为0 V时,芯片1管脚电平为低,经过逻辑取反以后,管脚2的电平转化为高电平。如此,当输入端输入不同频率的24 V脉冲时,输出端输出相应频率的5 V脉冲。
电路特点:(1)该电路阻抗不为无穷大。(2)基于电路可靠性方面的考虑,当二极管发生损毁时,24 V电压会直接输入至施密特触发器,造成芯片的损坏。(3)二极管反向偏置时存在的势垒电容,影响了系统的高频响应。

图1 稳压型调理电路
2.上拉型信号调理电路
上拉型调理电路原理图如图2所示,24 V转速脉冲信号从二极管负极输入,经过上拉电阻和RC低通滤波器滤波进入施密特触发反向器(SN54HC14D)。芯片对输入脉冲信号进行整形,经过整形的信号再次通过RC低通滤波器滤波对信号进行滤波,最终输出5 V脉冲信号。

图2 上拉型调理电路
电路工作原理为:当输入端电压为0 V时,二极管正向导通,直流5 V电压通过上拉电阻和二极管接入地,芯片1管脚电平为低,经过逻辑取反后,输出引脚2的电平转化为高电平;当输入端电压为24 V时,二极管反向截止,直流5 V电压通过上拉电阻和RC滤波器输入至芯片的输入管脚1上,此时芯片1管脚电平为高,经过逻辑取反以后,输出管脚2的电平转化为低。如此,当输入端输入不同频率的24 V脉冲时,输出端输出相应频率的5 V脉冲。
电路特点:由于二极管正向压降的作用,当输入端电压为0 V时,芯片SN54HC14D输入管脚的电压却不为0 V,而是二极管正向偏置电压VF,且VF的大小会受上拉电阻2R1的影响,如图3所示。
在往复机械故障诊断系统中,曲轴转速信号往往会被输入到多种设备中,各种设备之间由于阻抗不匹配的问题,可能会造成传感器输出的脉冲信号低电平电压(VL)大于0,加之上拉型调理电路中二极管自身的偏置电压VF,此时输入到芯片SN54HC14D第1管脚的低电平电压变为了VL+VF(图4描述了二极管正极处的信号,该信号低电平电压为680 mV,其中VL=56 mV,VF=624 mV)。如果VL+VF超过TTL电路中对于输入低电平的定义,那么芯片会将所有的输入信号全部识别为高电平,输出信号全部转换为低电平,导致信号调理功能失效。
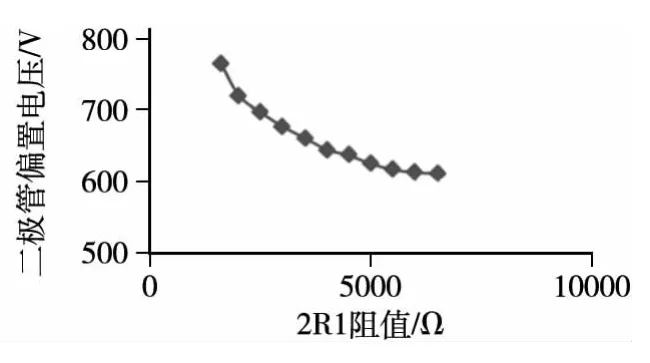
图3 二极管偏置电压VF与上拉电阻的关系

图4 二极管正极信号波形
3.比较器型调理电路
为了解决传感器输出信号低电平发生微量偏移造成施密特触发反向器无法识别低电平的问题,设计了比较器型调理电路。
比较器型调理电路用电压比较器替换了上拉型调理电路中的二极管。该方案提高了电路的输入阻抗,消除了传感器输出低电平电压VL>0的现象,同时避免了二极管的偏置电压。提高了系统在复杂环境下的抗干扰能力。比较器选用的是LM393AN芯片,电路原理图如图5所示。

图5 比较器型调理电路
工作原理:24 V电压通过电阻3R1和3R2分压后产生2.18 V的参考电压,输入至电压比较器2管脚。当脉冲输入端电压高于2管脚的参考电压(2.18 V)时,电压比较器1管脚为高阻态,此时芯片SN54HC14D的1管脚电压为5 V;当脉冲输入端电压低于2管脚的参考电压(2.18 V)时,电压比较器1管脚输出低电平(0 V),此时芯片SN54HC14D的1管脚电压也为0 V。可见该电路去除了传感器输出信号的偏移量。最后信号经施密特反向触发器整形后输出5V脉冲信号。
为了验证比较器型调理电路的性能,将传感器信号输入至电路输入端,由于阻抗不匹配致使传感器信号发生了偏移,信号低电平偏至1.8V,高电平为24 V,如图6所示。示波器读取电路输出端信号,如图7所示。可见当传感器输出的脉冲信号发生较大幅度的偏移时,电路仍能输出正常的脉冲信号,以确保曲轴转速采集系统能够采集到正确的转速信号,提高了复杂环境下的抗干扰能力。

图6 传感器信号

图7 电路输出波形
三、结论
针对霍尔型传感器转速信号调理电路进行了研究,通过采用电压比较器电路和施密特反向触发器电路串联的方法,对传感器输出的脉冲信号进行整形,消除了由于阻抗不匹配所造成的传感器输出脉冲信号发生偏移的现象。为往复机械曲轴转速测量系统提供了可靠的转速信号。
1 于炳亮.电机转速测量方法研究[J].山东科学,2005,05:41-42,51
2 刘小强,粟梅.基于CAN总线的数据采集处理系统的设计[J].仪表技术与传感器,2006,09:22~24
3 叶菁.多功能转速测量仪的研制[D].天津大学,2012
4 姚伟鹏,韩党群.一种新型电机转速测量方法的研究[J].电子元器件应用,2008,12:65~66
5 郑哲,肖勇,葛晓宇,潘佩琦.基于光电传感器的风轮转速测定[J].测控技术,2013,07:38~40
6 赵世荣,黄向华,张天宏.基于嵌入式实时操作系统PICos18的多用途智能转速表的研制[J].测控技术,2007,01:4~6
7 段礼祥,张来斌,王朝晖.往复机械故障诊断的现代方法及展望[J].石油机械,2004,11:66~69,77
8 赫伟英,裴峻峰.往复机械故障诊断技术进展综述[J].化工机械,2010,05:671~674,678
9 王立勇,徐小力,赵二辉.基于相位检测的往复机械故障诊断方法研究[A].中国振动工程学会故障诊断专业委员会.第十二届全国设备故障诊断学术会议论文集[C].中国振动工程学会故障诊断专业委员会,2010:3
猜你喜欢
轨道交通装备与技术(2021年5期)2021-11-19
汽车维修技师(2018年7期)2018-12-07
制造业自动化(2016年8期)2016-09-12
电子制作(2016年19期)2016-08-24
电子产品可靠性与环境试验(2016年6期)2016-05-17
核技术(2016年3期)2016-04-19
电子设计工程(2015年15期)2015-02-27
中国舰船研究(2015年2期)2015-02-10
影像科学与光化学(2014年3期)2014-03-11
电子测试(2013年22期)2013-09-26

- 设备管理与维修的其它文章
- 电缆超低频(VLF)正弦波耐压试验的应用