太阳双轴自动跟踪系统的设计
2014-01-01 02:59:58秦皇岛技师学院宋雅茹高振东
太阳能 2014年2期
秦皇岛技师学院 ■ 宋雅茹 高振东
0 引言
太阳自动跟踪器主要用于太阳能光伏发电领域,它控制光伏组件阵列自动跟踪太阳运行,获得光伏发电所需最大的太阳日照量,提高光伏组件阵列的发电量。这种自动跟踪系统的设计主要采用自动控制、机械和电子等相关技术。
从地面上看,太阳在一天之内从东到西环绕地球,只有在正午时才在南北向的水平面内,太阳光强在正午时达到最高,随着季节的不同,太阳光强的变化情况有所不同。由于气候的影响,如云雾遮住太阳,都会影响太阳的光强。太阳能光强的变化直接影响太阳能发电的发电量。因此,太阳能发电采用自动跟踪器使太阳电池方阵跟踪太阳运行,随时做出相应的反应,使太阳光垂直照射在太阳电池板的受光面上。
自动跟踪系统分单轴跟踪和双轴跟踪。单轴是指东西方向跟踪太阳运行,即一天内根据太阳方位角的不同来调节,采用单轴旋转;双轴跟踪是在单轴跟踪的基础上增加垂直方向跟踪太阳运行,即根据太阳高度角的变化来调节,有两个旋转轴。图1给出了受光面不跟踪、单轴东西跟踪及双轴跟踪时年日照量的对比变化,并给出了年日照量与纬度的关系和受光面不跟踪时太阳能方阵与地面最佳倾角。
由图1可知,年总日照量最大值与纬度略有关系,即纬度增加而减小,在所示纬度范围内,这种变化较小。在高纬度范围内,日照量将显著减小。使用跟踪方法可大辐增加日照量。根据硅太阳电池的光电特性,当太阳电池受照射时,太阳电池的工作电压随光强增加而呈指数上升,弱光时增加很快,强光下趋于饱和;电流随光强增加而增加,强光时线性很好。所以提高入射光强,可提高太阳电池的输出功率。
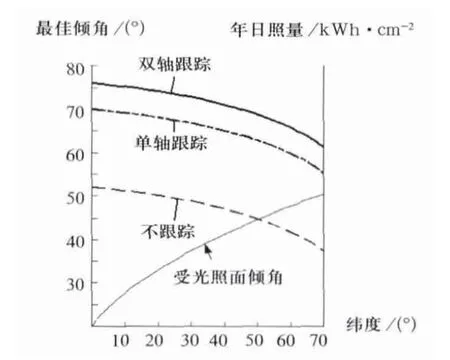
图1 不同跟踪情况下所得日照量与纬度关系
1 太阳自动跟踪系统的设计
太阳自动跟踪控制系统采用双轴自动跟踪。如图2所示,它是一个闭环控制系统,由光电传感器、控制电路、电机和机械传动4部分组成。光电传感器自动检测太阳光入射角及光强的变化,通过控制电路、电机和机械传动实现太阳电池方阵跟踪太阳间断运行的跟踪控制要求。
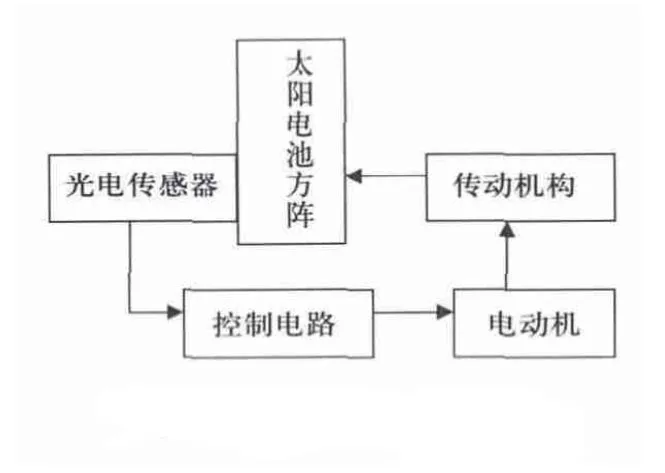
图2 自动跟踪系统方框图
2 太阳自动跟踪系统部件及工作原理介绍
2.1光电传感器
光电传感器是把光伏组件方阵法线偏离太阳光线的角度信号转换为电信号的装置。它是跟踪系统的重要部件,它的结构决定跟踪的精度。跟踪精度是控制器的一个重要技术指标,用太阳与方阵偏转的角度来衡量。精度高、跟踪准确,但这就意味着电动机启动频繁,电耗增加,影响方阵电量的输出,同时也影响控制器的寿命。跟踪的精度高,不仅增加了电耗和复杂性,而且往往受限于机械结构和加工的影响,设计精度难以实现。根据方阵具体结构的要求,跟踪精度控制约在18¡较为适宜。
如图3所示,本系统所使用的光电传感器由4个光电二极管、矩形和管型遮光板构成。带剖面线的圆圈部分为光电二极管,左右为东西向光电二极管,上下为南北向光电二极管。南北向光电二极管其中一个位于圆管底部中间位置,圆管起到遮光板的作用。
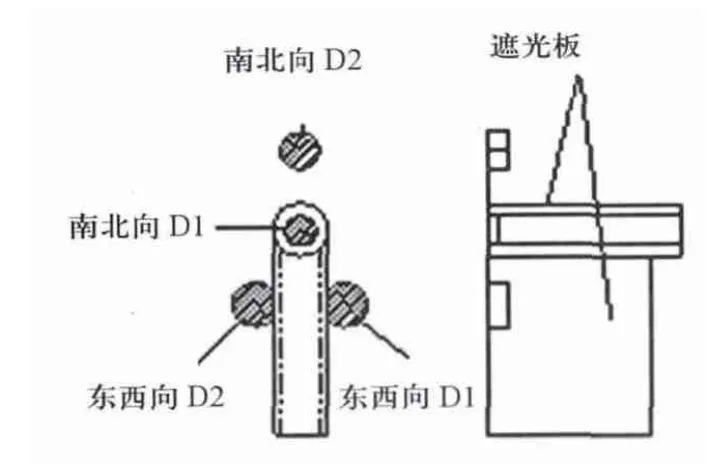
图3 光电传感器结构示意图
2.2 机械传动与支撑结构
如图4所示,光伏发电系统的机械传动系统由支撑部分和传动部分组成,具有固定、支撑、旋转、抗风力和防腐防锈的功能。传动部分东西向采用涡轮蜗杆旋转传动,垂直向采用齿轮齿条。涡轮蜗杆传动结构紧凑,传递动力较稳定,工作可靠而且自锁能力较强, 机械的传动间隙达到0.02 m。支撑方阵的跟踪支架采用轴架式结构,跟踪系统的输出轴同时起到方阵支撑架的作用。机械传动部分的强度应能经受工作现场的最大风力,并有密封润滑和防尘措施确保系统可靠性。太阳在水平运动的角度为0.25¡/min,方阵的运行速度应略大于太阳的运行速度,但不能太大,否则会因惯性作用引起方阵的往复振动。采用机械减速和电机减速同时进行的设计方案,涡轮蜗杆传动比为180:1;垂直齿轮齿条传动比为156:1,两传动系统分别在减速直流电机和控制器作用下,实现自动跟踪太阳功能,系统输出转速小于2 rpn。
图4 光伏发电系统机械传动组装图
2.3 自动跟踪控制器
目前普遍使用的自动跟踪电路的设计有模拟电路和数字电路两大类。数字电路采用单片机控制,较为常用,跟踪精度较高,但电路结构较为复杂,成本相对较高,抵御环境能力较差,不易维护;采用模拟电路尤其是开关类型电路,具有电路结构简单,稳定性高,抵御环境能力强,易维护,成本低等优点。本设计采用开关型电路,使得电动机带动整个系统工作在间歇工作状态,减小了系统的电量消耗和使用寿命,控制精度完全达到使用要求。因为光伏组件方阵是一个无人值守的系统,跟踪控制功能除要求跟踪太阳之外,还要能鉴别光强的高低,即在光强达到足以利于时开始跟踪,光强低于这个水平时停止跟踪。夜间时,方阵要返回到第二天的起始工作位置,并能自动切断电源。
自动跟踪控制器电路如图5所示。由东西向跟踪电路和南北向跟踪电路两部分组成,因两部分电路完全相同,所以以东西向跟踪电路为例。该控制电路主要由光电传感器、下行迟滞电压比较器、电机驱动电路、夜晚返回电路、辅助电路和24 V稳压电路等组成。
图5 自动跟踪控制器电路原理
光电传感器由光电二极管D1、D2组成,如图3所示。D1、D2位于光电传感器左右两边,检测东西向运行太阳与方阵的偏转角度。当太阳垂直照射在方阵上,光电二极管均被照射,均导通;当随着太阳西移时,遮光板遮挡住一侧的光电二极管,另一侧的受光照导通。
下行迟滞电压比较器由集成运算放大器IC2A和IC2B及周围附属元件构成,光电二极管作为比较器的输入端,把模拟量送入运放反相输入端,与一个给定电压同相输入端,两者进行比较,输出开关量,实现模拟量到开关量的转换。该电路带有正反馈,所以增加了输入信号的幅度,提高了信号识别能力。
以D1和集成运算放大器IC2A为例对电路进行分析。光电二极管D1 把光信号转换成电信号,加在运放IC2A的反向输入端,电压为U-。运放同相输入端电压U+,电阻R4、Rw3、Rw2构成正反馈电路,反馈信号Uf作用与同相输入端,通过分压电阻R3和Rw2提供参考电压Uz。
式中,RD为光电二极管的阻值。
若光电二极管不被光照,处于截止状态。RD较大时,运放同相输入电压U+低于反相输入电压U-,运放输出电压Uo=-Uom,为饱和负电压。该低电压使驱动电路中开关三极管截止。当光电二极管被光照射后导通,RD较小,两端电压变小,同相端电压U+高于反相端电压U-,而且在正反馈的作用下,运放同相输入端电压U+得到加强,运放输出端电压Uo=Uom,输出为饱和高电平。该高电平使驱动电路开关管导通。该电路引入正反馈,大大提高电路开关速度和电路工作的准确性,该电路设计性能可靠稳定。
电机的驱动电路由继电器JK1、JK2 和开关三极管Q1、Q3构成。开关三极管具有控制电路简单、集电极电流大、开关速度较快等优点,和继电器配合,在辅助电路的作用下,24 V电源接通使得直流电机按照要求正转、反转和停止。当D1遮挡而D2受照射时运放IC2B输出高电平,D7导通,Q3饱和导通,线圈JK2得电,其常开触点闭合,经过线圈JK1的常闭触点接通电机的24 V直流电,电机向传感器D2 方向转动;当D2遮挡而D1受照射时,运放IC2A输出高电平,二极管D6导通而D7、D8截止,Q3饱和导通,线圈JK1、JK2同时得电,电机经过线圈JK1常开触点和线圈JK2常闭触点接通24 V电源,向传感器D1 方向转动。当太阳垂直照射方阵时,传感器D1和D2同时被照射,运放IC2A和IC2B同时输出高电平,三极管Q2和Q4饱和导通,使得二极管D6和D7阳极接地被截止,线圈不闭合,电机不得电,停止工作。
夜晚返回、停止电路由限位开关K2 、K1和继电器JK3构成。当光伏组件方阵夜晚转到西边时,西限位开关K2闭合,线圈JK3得电,运放IC2A反相输入端电压低于同相输入端电压,运放输出高电压,开关三极管Q1和Q3饱和导通,继电器JK1和JK2得电,电机反转,回到起始点。K1断开,电机停止转动。
辅助电路是由三极管(Q4和Q2),二极管D6、D7、D8和相应电阻构成。其作用是当太阳垂直照射在光伏组件阵列上时,使驱动三极管截止,电机停止转动。
3 结束语
全文介绍了太阳自动跟踪控制器电路结构及工作原理,并进行了详细的电路分析。该设计采用开关电路设计,巧妙地运用了二极管和三极管的开关特性,电路简单、价格便宜而且实用、工作稳定、耗电量少、便于维护、抵御环境能力强,综合性能优于数字电路和模拟电路控制器。采用跟踪器后可使平均功率提高30%以上。
双轴跟踪器已应用在我院小型太阳能电站项目上,完全达到了设计要求。控制器跟踪性能稳定。该控制器也可用于其他太阳能应用行业。
[1] 赵富鑫. 太阳电池及其应用[M]. 北京: 国防工业出版社, 1985.
[2] 刘阿玲. 电子技术[M]. 北京: 北京理工大学出版社, 2009.
[3] 陈安宇. 医用传感器[M].北京: 科学出版社, 1997.
猜你喜欢
作文小学高年级(2022年6期)2022-07-01 09:41:42
学生导报·东方少年(2019年24期)2019-12-30 09:39:43
成都信息工程大学学报(2019年1期)2019-05-20 09:14:22
水电站机电技术(2017年9期)2017-09-26 03:34:52
新乡学院学报(2016年6期)2016-12-01 05:21:40
微特电机(2016年3期)2016-11-29 09:43:45
数学小灵通(1-2年级)(2016年4期)2016-11-16 05:58:12
电子制作(2016年1期)2016-11-07 08:43:05
散文诗世界(2016年5期)2016-06-18 10:03:10
工业设计(2016年11期)2016-04-16 02:49:20