应用于聚光光伏系统的高精度跟踪器的研究
2014-01-01 02:59盛飞吕辉官成钢
太阳能 2014年12期
■ 盛飞 吕辉* 官成钢
(1. 湖北工业大学太阳能高效利用湖北省协同创新中心;2. 湖北工业大学理学院;3. 武汉凹伟能源科技有限公司)
0 引言
自第三代多结聚光太阳电池出现以来,虽然单个太阳电池的光电转化效率不断有所提升,但是要提高整个光伏系统发电效率,聚光模组受光面垂直于太阳光照方向的精确度是其关键所在[1-2]。为此,本文设计一种具有高精度、高稳定性、低成本的太阳能跟踪器应用于聚光发电模组,在一定程度上提高太阳能量接收效率,从而提高整个光伏系统发电效率。
1 太阳能自动跟踪器的设计及工作原理
1.1 自动跟踪器的结构设计
本设计结构选用4片LXD1010CE硅光电池,应用于自动跟踪器外部四象限分布;4片BH1603FVC光敏传感器芯片应用于自动跟踪器内部四象限分布[3-4];内外传感芯片分布相互对应,其分布情况如图1所示。
1.2 自动跟踪器的工作原理
如图1所示,在太阳光照下,外罩对应面上的两片硅光电池受太阳光照射产生光感电流,经过电子控制系统转化、放大、滤波及比较运算处理,从而驱动步进电机使跟踪器向光感电流大的方向移动,使得外罩对应两片硅光电池产生光感电流值大致相等。这时,太阳光基本上由顶部圆孔进入罩内并照射到与外罩对应方向的内部光敏传感器芯片(或受部分光照);同时,电子控制系统从采集外部光感电流自动切换到采集内部光敏电流,经过电子控制系统分析处理并驱动步进电机使跟踪器向光敏电流小(或无)的方向移动,使得对应方向光敏传感器产生的光敏电流值基本相等[5-6]。
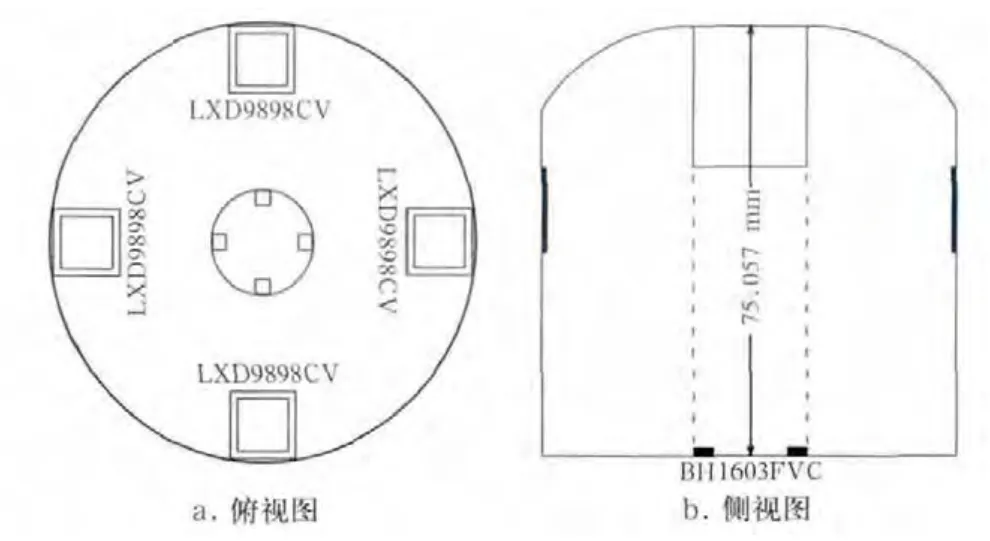
图1 太阳能自动跟踪器俯视图和侧面横截面图
前半部分称为自动跟踪的粗调制过程,目的是为了在罩内无任何光线的情况下可确定太阳大致方位;后半部分称为自动跟踪的精调制过程,设置顶部圆孔目的是为了避免白天光线的衍射光照影响跟踪器的精度,在有太阳光照的情况下,圆孔边缘轮廓很清晰地投影于四象限光敏传感器芯片外边缘。通过编程设置相应的转化光电压阈值,使得粗调制与精调制在CPU的处理下自动切换,并驱动电机运转,实时采集数据,以达到对太阳方位精确定位的目的。
2 电子控制系统设计
依据上述结构和工作原理,电子控制系统采用32位RISC架构ARM7TDMI内核处理器ADuC7022为主控芯片,系统硬件结构框图如图2所示。
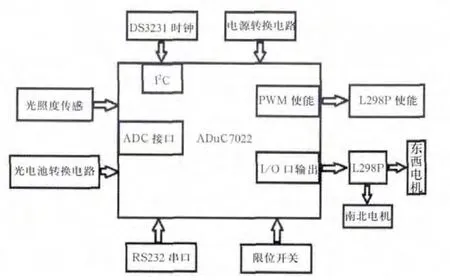
图2 控制系统硬件结构框图
系统控制硬件的设计重点在于光电信号处理、电源供电及执行层电路的设计。硅光电池将太阳光照转化为电流信号,经过AD8615等放大、滤波操作处理转化为CPU的ADC模块能识别的电压信号,经处理后利用其PWMTRIP模块实现对L298P电机驱动芯片的相应拐角使能,以达到对步进电机的高精度控制。L298P最高工作电压可达46 V,电流瞬间峰值可达3 A,持续工作电流为2 A,完全可保证步进电机正常供电。当然,产生的PWMTRIP信号不能直接接到L298P上,须经过芯片PS2705进行光耦隔离,避免电机线圈产生电感干扰整个电路网络。系统利用7022的I2C模块实时读取DS3231时钟芯片,完成实时数据的计算和处理。通过RS232芯片与CPU通信,可完成对系统的软件控制。
软件编程方面,系统的工作时间为07:00~17:00,复位时间为06:00~06:30,其他时间处于休眠状态。在工作时间且有光照时,电子控制系统才开始进行粗、精跟踪的切换工作,以达到对太阳方位的精确定位。随时间的推移,对CPU实时采集光感芯片产生的数据进行对比,形成一种闭环主动跟踪太阳的工作模式[7-8]。工作中,当四象限采集数值突然变得很小或没有时,可能受空中漂浮物干扰或变天而使光照陡然减弱的影响,此时系统自动切换为外部粗跟踪重新开始太阳方向定位。其软件控制流程图如图3所示。
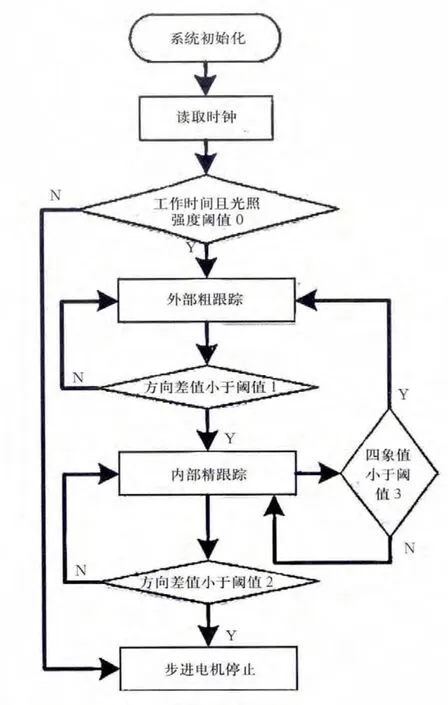
图3 软件控制流程图
3 太阳能自动跟踪器精确度误差分析及测试
3.1 四象限光感芯片选取分析
太阳的辐射能量主要集中在200~1400 nm的光谱范围内,能到达地球的太阳辐射较集中在短波谱范围。本设计使用的四象限硅光电池片的光谱响应范围在360~1100 nm[9],比较符合到达地球的太阳辐射光谱,所以,我们选用LXD1010CE型硅光电池片和BH1603FVC光敏传感器作为跟踪器的光感芯片。四象限硅光电池的响应一致性直接影响到跟踪器跟踪精度和稳定性,所以,为了得到四象限对均匀光入射时的响应一致性,我们做了类似于QP50-6-TO8探测器的检测试验[10],筛选出同一四象限内对应方向产生光电流及通过I-V转换电路输出电压信号一致性的光感芯片,可有效降低相同状况下产生不可避免的误差。图4为来自不同公司芯片Datasheet中的光电流与太阳均匀光照一致性数据图。
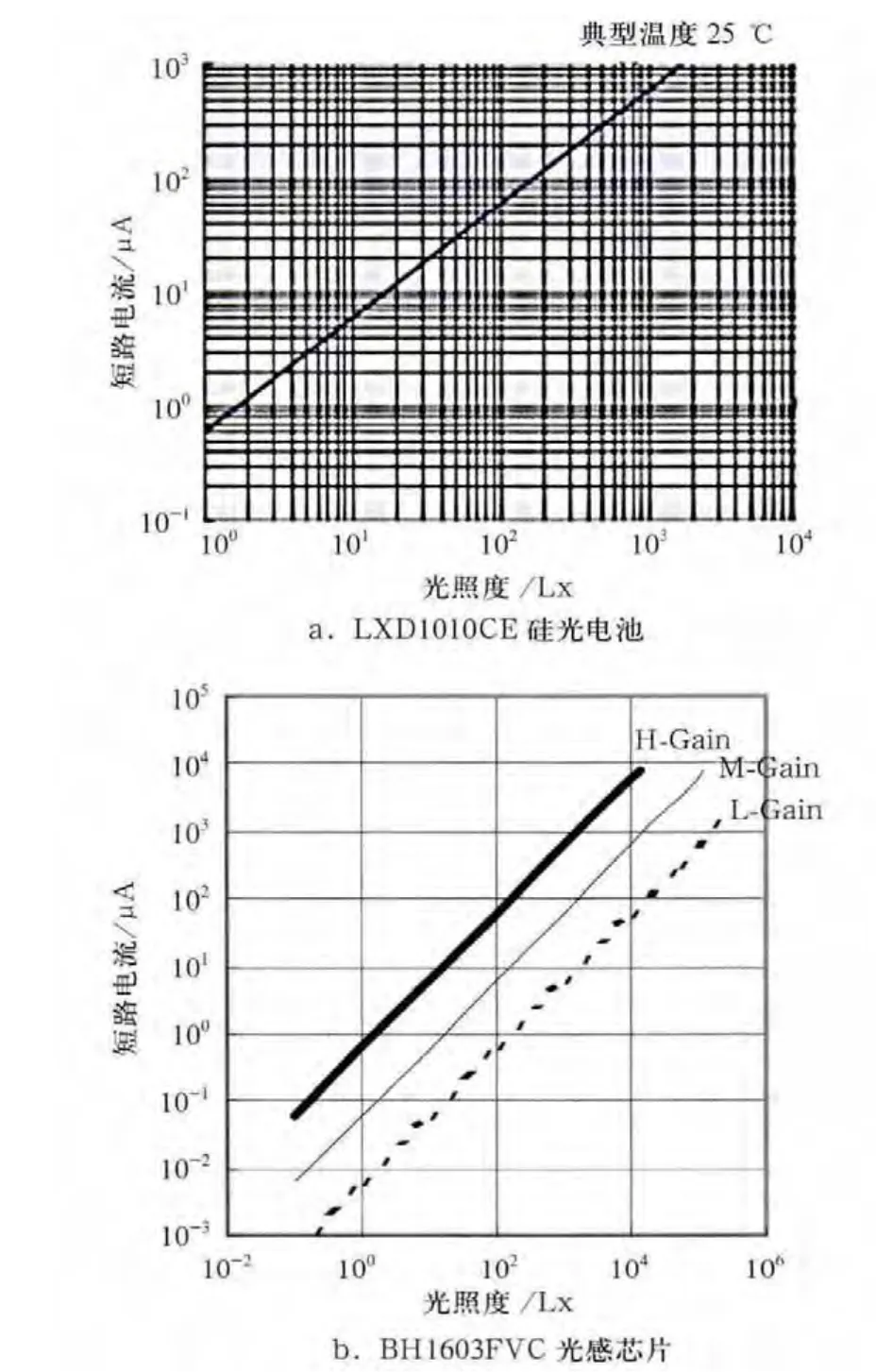
图4 两款光感芯片光电流的一致性
在数据传输过程中,应尽量减少数据线的长度和增强硬件电路可靠性来提高数据传输效率,使数据的采集与步进电机运转尽量达到同步,最终提高整个系统运作的精确度与稳定性。当然,系统中不免有些难以消除的影响因素,难免会产生相应误差。
3.2 长筒测量仪的误差分析
自动跟踪器的跟踪精度是由内部四象限精跟踪决定的。硅光电池与光感芯片的灵敏度固定,所以要提高跟踪精度只能从其设计结构入手。自动跟踪器的结构如图1所示,其外圆直径为7.5 cm,顶部圆孔直径为2 cm,内部四象限光感芯片(尺寸2.6 mm×1.6 mm×0.75 mm)平面到顶部圆孔垂直距离为7.5 cm。针对如何确定跟踪器跟踪精度的有效性,我们运用长筒测量仪来直观表现。
长筒测量仪顶部入射光孔(直径4 mm)到底部投影圆心的垂直距离为H=56 cm,长筒测量仪的底部是由光刻的同心圆环组成的平面,中心圆环直径R约为4.98 mm,往外依次直径为5.95 mm、7.91 mm、9.86 mm、11.82 mm(按照四舍五入取值)的圆环分布。依据直角三角形的正切计算,其入射误差角θ为:

经过计算,其太阳光照垂直分辨率(误差角θ)依次为 0.05°、0.1°、0.2°、0.3°、0.4°,具体分布情况如图5所示。
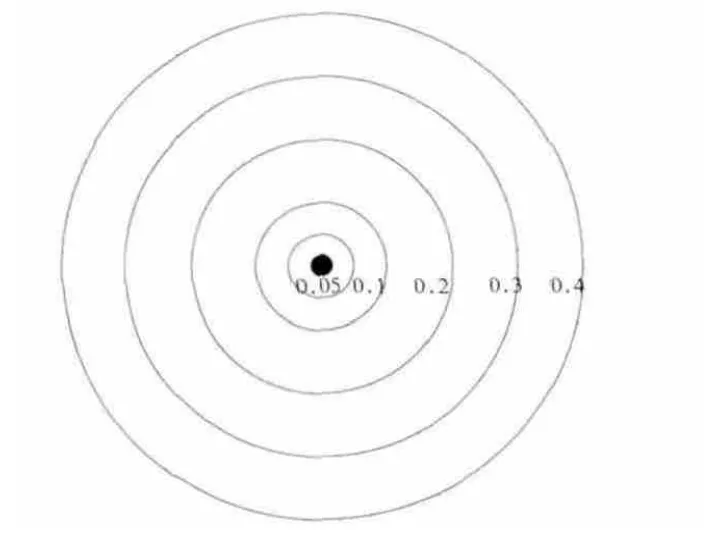
图5 长筒测量仪底部精确度表盘分布图
在对太阳方位的实际跟踪过程中,将跟踪器底部与长筒测量仪底部置于同一水平面上,并与聚光发电模组受光面平齐。经过反复试验与测量记录,跟踪器正对太阳方位的情况下,长筒顶部入射光孔在底部同心圆环的投影始终处于中心圆环内部,单个聚光发电模块的发电功率也明显增大,即跟踪器的跟踪精度达到了预期,其跟踪误差为±0.05°。跟踪器的实际跟踪情况如图6所示。
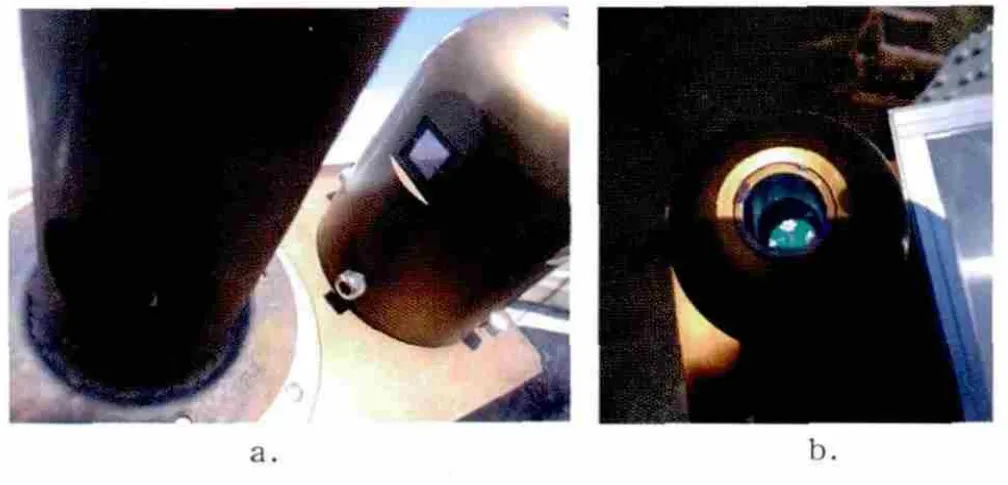
图6 太阳能自动跟踪器精确对准太阳方位实物图
4 结论
本文设计了一种高精度的太阳能自动跟踪器。通过改进原有跟踪器中光敏元器件及分布结构,加上稳定性高的硬件电路和可靠的软件程序综合控制,并结合高精度检测偏斜角度的长筒测量仪,明显验证了自动跟踪器对太阳方位确定的跟踪精度。通过实践验证,的确具有非常好的跟踪效果,在太阳光照达到一定强度时其跟踪精度可达0.05°,成本相对较低,跟踪器的稳定性也比较可靠。配合具有菲涅尔透镜的多结聚光发电模组,使光伏发电系统整体效率大为提高,具有较高的实际应用价值。
[1] 王小鑫, 胡红利, 王博. 高精度太阳能跟踪控制器[J]. 电光与控制, 2012, 19(12):80-83.
[2] 王炳忠, 汤浩. 几种太阳位置计算方法的比较研究[J]. 太阳能学报, 2001, 22(4): 413-417.
[3] 冯静, 张龙, 刘先立. 四象限太阳跟踪传感器的设计[J]. 新能源与新材料, 2010, (4):12-15.
[4] Fontani D. Pointing Sensors and Sun Tracking Techniques[J].International Journal of Photoenergy, 2011.
[5] 郭铁铮, 刘德有, 钱艳平, 等. 基于DSP的定日镜跟踪控制系统研究[J]. 太阳能学报, 2010, 31(1): 5-11.
[6] 卞新高, 杨缝缝, 辛秋霞. 一种大范围太阳光线自动跟踪方法[J]. 太阳能学报, 2010, 31(10): 1298-1303.
[7] Ming Xu, Tingting Ding, Xuemei Zhu. Methodology for closed loop control of heliostat tracking in a solar tower Power[J].Advanced Materials Research, 2011, 347-353:1098-1101.
[8] Roberto Grena. An algorithm for the computation of the Solar position[J]. Solar Energy, 2008, 82(5): 462-470.
[9] Shen Zhen, Long Xinda. Technology CO., LTD. Pacifi c silicon sensor LXD1010CE data sheet[EB/OL]. www.lxdcn. com/index.html, 2011.
[10] 刘恩超. 基于四象限探测器进行太阳跟踪的偏差分析[J].大气与环境光学学报, 2012, 7(2):139-146.
猜你喜欢
中国饲料(2022年5期)2022-04-26
太阳能(2022年3期)2022-03-29
山东陶瓷(2021年5期)2022-01-17
炎黄地理(2021年12期)2021-01-04
太阳能(2020年3期)2020-04-08
当代工人·精品C(2019年2期)2019-05-10
电子制作(2018年11期)2018-08-04
计算机应用与软件(2017年7期)2017-08-12
红领巾·成长(2017年5期)2017-07-05
女友(2016年3期)2016-09-13