
变速恒频风力发电用双PWM变换器的协调控制
2013-12-29 10:32:40孟彦京李林涛张晓娟陈景文
电子器件 2013年5期
孟彦京,李林涛,张晓娟,陈景文
(陕西科技大学电气与信息工程学院,西安710021)
风力发电是可再生能源中最廉价、最有希望的能源,并且是一种不污染环境的“绿色能源”[1]。而风力发电中的变速恒频控制技术和双PWM(Pulse Width Modulation)变换技术是目前比较先进的发电控制技术。双馈发电机变速恒频风力发电方案是通过在双馈电机的转子侧施加三相交流电进行励磁,调节励磁电流的幅值、频率和相位,实现定子侧输出恒频恒压;由于采用了矢量控制技术,实现了有功、无功功率的独立调节,从而改善风电机组和所并电网的动态和静态特性。
目前,国内外相关文献主要集中研究并网后基于定子磁场定向双馈电机有功功率和无功功率的解耦控制,而对并网前定子电压控制的研究很少,因此研究并网前的双PWM控制技术有着非常重要的意义。
本文分析了风力机的运行特性及最大风能捕获运行原理,建立了双馈异步发电机和双PWM变换器在不同坐标下的模型。然后研究了双PWM变换器的控制策略,控制采用定向矢量变换控制技术,对发电机转子侧进行交流励磁,从而实现最大风能捕获的高效发电运行,并综合矢量控制技术对整个发电系统进行建模仿真。结果表明此策略实现了风力发电机的变速恒频运行,另外在定子电流变化的同时,保持了恒定的功率因数,实现了对双馈感应电机的有功功率和无功功率的独立控制,控制效果良好。
1 双馈发电机的原理及模型分析
1.1 双馈发电机结构特点及等效电路
交流励磁双馈发电机定子接入电网,转子绕组由频率、相位、幅值可调的电源供给三相低频励磁电流,在转子中形成一个低速旋转的磁场,这个磁场转速与转子的机械转速相加等于定子磁场同步速,从而在发电机定子绕组中感应出同步转速的工频电压[2]。风速变化时转速随之变化,以达到变速恒频的目的。当转子处于亚同步时,Ps>0,转子从变频电源输入功率;当转子处于超同步时,Ps<0,转子向变频电源输出功率。无论哪种情况,输入机械功率总要克服电磁转矩做功,同时向定子传递功率[3]。其等效电路与时空矢量图如图1、图2所示。

图1 等效电路图

图2 相量图
1.2 双馈发电机的功率关系及数学模型
首先是风力机吸收风能产生机械转矩,然后通过传动装置带动发电机转子转动,从而将机械功率传递给发电机;转子绕组本身接入励磁电流建立磁场,由于转子的转动,在定子绕组中感应出电流,功率就这样通过磁场传递到定子侧。
电磁功率Pem是由双馈电机轴上输入的净机械功率Pem与转子绕组输入的有功功率P2一起,在扣除转子铜耗Pcu2之后建立的,即:

式中,s为转差率。
电磁功率Pem传递到定子侧后,又有一部分消耗在定子绕组铜耗Pcu1,和电机铁耗PFe上。双馈发电机通过定子输出的有功功率,也就是一般意义上的发电功率。即:

一般情况下,双馈发电机的数学模型由电压方程、磁链方程、转矩方程和运动方程组成。图3所示为双馈电机的物理模型[4]。定子三相绕组轴线A、B、C在空间是固定的,以A轴为参考坐标轴,转子绕组轴线a、b、c随转子旋转,转子a轴和定子A轴间的电角度θ为空间角位移变量。定子电压、电流正方向按照发电机惯例标示,转子电压、电流正方向按照电动机惯例标示,选定各相绕组轴线的正方向为各相绕组磁链的正方向。
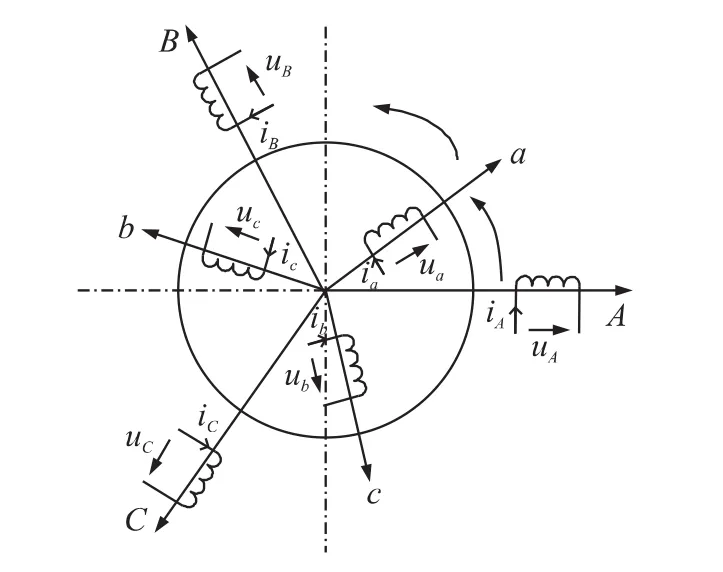
图3 双馈电机的物理模型
定子侧按发电机惯例,电流以流出为正;转子侧按电动机惯例,电流以流入为正。为便于分析问题,根据坐标变换的思想,可以分别建立出双馈电机在三相静止坐标系ABC、两相同步旋转坐标系d-q、两相静止坐标系αβ下的数学模型[5]。
2 双PWM变流器及其运行控制
三相电压源型双PWM变换器是由两个完全相同的电压型三相PWM变换器连接而成,由于在变速恒频交流励磁双馈风力发电系统的运行过程中,两个PWM变换器的工作状态经常变换,通常不再以它们工作于整流或逆变的状态来区分它们,而是按照它们的位置分别称之为网侧PWM变换器和转子侧PWM变换器。三相电压源型双PWM变频器的拓扑结构如图4所示,图中的全控器件采用IGBT。两个三相电压源型PWM全桥变换器采用直流链连接,靠中间的滤波电容C稳定直流母线电压[1]。
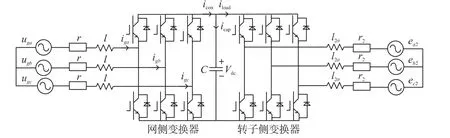
图4 双PWM变频器主电路结构图
转子侧变流器的作用:一是给DFIG的转子提供励磁分量的电流,从而可以调节DFIG定子侧所发出的无功功率,二是通过控制DFIG转子转矩分量的电流控制DFIG的转速或控制DFIG定子侧所发出的有功功率,从而使DFIG运行在风力机的最佳功率曲线上,实现最大风能追踪(捕获)运行[5]。
网侧PWM变流器的任务主要有:一是实现能量的双向流动;二是保证其良好的输入特性,即输入电流的波形接近正弦,谐波含量少,功率因数符合要求;三是保证直流母线电压的稳定,直流母线电压的稳定是两个PWM变流器正常工作的前提,是通过对输入电流的有效控制来实现的[5]。
3 双PWM的控制策略及仿真
3.1 三相双PWM变换器的常规控制策略
常规控制策略采用双闭环PI调节控制策略,引入了负载电流iload前馈,与电压PI调节器的输出合成为d轴电流的给定。常规的负载电流前馈控制原理框图如图5所示。

图5 常规的负载电流前馈控制原理框图
3.2 三相双PWM变换器的协调控制策略
常规控制策略的缺点是仅考虑了负载的功率(或电流),而没有考虑负载功率(或电流)的动态特征(即其微分量)。另外,对负载电流iload的补偿是在电流环之内,需要经过电流PI调节器作用后才能产生有效的控制电压,所以其动态性能受限于PI调节器自身的响应延迟。针对其弊端,提出新型控制策略,其思路是直接在控制电压处进行补偿控制,负载电流iload的补偿项中含微分算子s,整合了电机动态性能。补偿项不经过电流PI调节器,避免了与PI调节器相关的延迟,大大加快了其动态响应,其原理框图如图6所示。
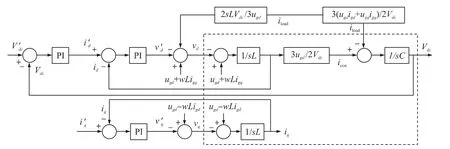
图6 三相PWM变换器新型协调控制策略原理框图
3.3 变速恒频风力发电系统的仿真
分别建立了仿真中所用各个部件的仿真模型,即风力机的仿真模型、双馈异步发电机的仿真模型、双PWM的仿真模型、dq-ABC和ABC-dq的坐标变换模型。然后建立了转子侧和网侧变换器的控制模块。最后建立了总的变速恒频风力发电用双PWM变换器的协调控制仿真模型如图7所示。
用三相可编程电源来模拟电网,电压为120 kV,频率为50 Hz,输电线路用等效π型阻抗线路来简单等效。仿真主要参数有:风力机的风轮半径R=4 m,最佳叶尖速比λm=0.9,最大风能利用系数值Cpmax=0.4,齿轮传动比N=8,空气密度ρ=1.25 kg/m3。双馈发电机额定功率Pnom=2 000 kW,额定电压Vnom=690 V,额定频率Fnom=50 Hz。转子绕组电阻r2=0.01 pu,定子绕组电阻r1=0.01 pu,转子绕组漏感Llr=0.1 pu,定子绕组漏感Lls=0.1 pu,互感Lm=3.36 pu。PWM变换器开关频率f=40×Fnom。直流母线电压Vdc_nom=1 200 V,电容C_DClink=0.01 F。电感环节:电阻R_RL=0.003 pu,电感L_RL=0.3 pu。

图7 变速恒频风力发电仿真图
图8对比了采用常规控制策略和采用双PWM变换器的协调控制策略情况下直流母线电压,从图中我们可以看出采用新型协调控制策略具有更好的动态性能和稳定性。通过对比图9的定子电压、电流波形和图10的有功功率、无功功率的波形,我们可以看出无论风速是否变化,定子输出的电压、电流波形幅值、频率都基本相同,实现了风力发电机的变速恒频运行,另外在定子电流变化的同时,保持了恒定的功率因数,实现了对双馈感应电机的有功功率和无功功率的独立控。

图8 直流母线电压对比波形

图9 定子侧输出电压、电流(v=10 m/s和v=20 m/s)
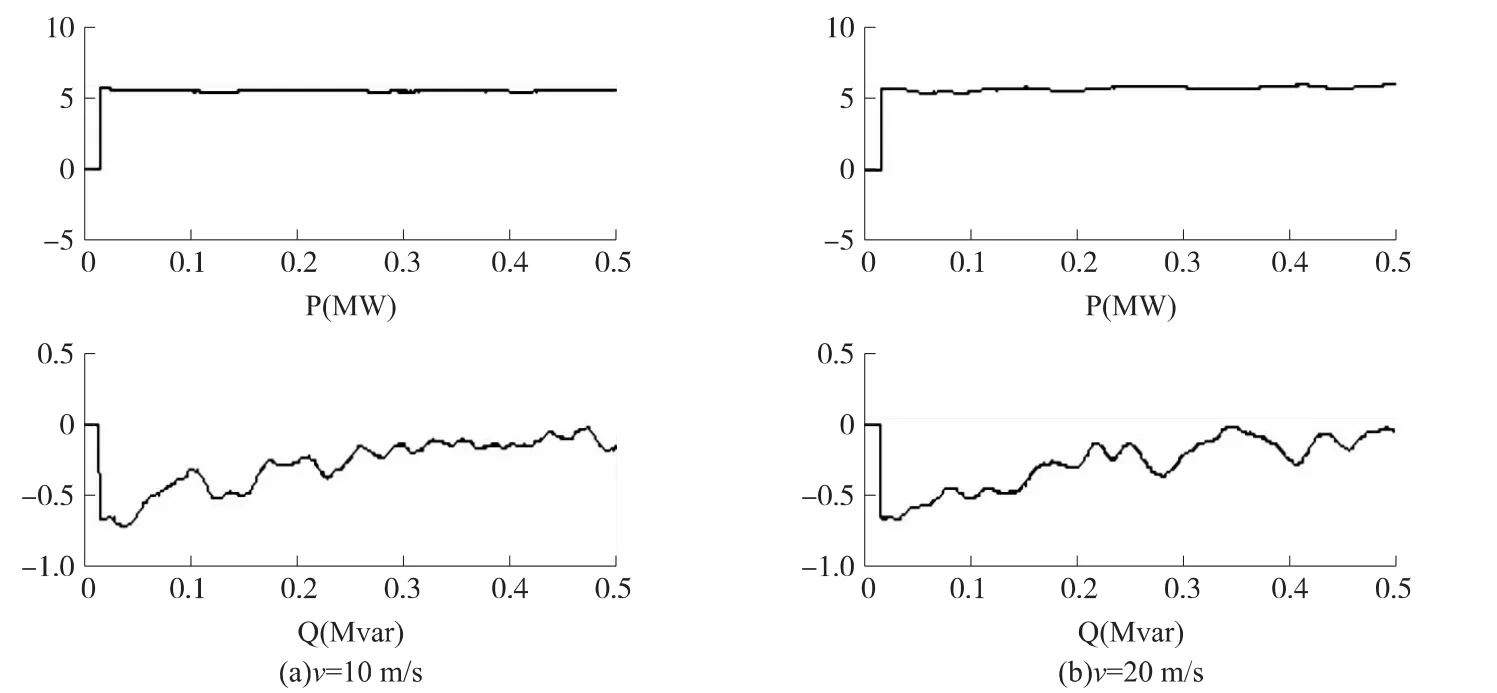
图10 有功功率、无功功率波形(v=10 m/s和v=20 m/s)
4 结论
通过对比图8、图9的定子电压、电流波形和图10、图11的有功功率、无功功率的波形我们可以看出无论风速是否变化,定子输出的电压、电流波形幅值、频率都基本相同,实现了风力发电机的变速恒频运行,另外在定子电流变化的同时,保持了恒定的功率因数,实现了对双馈感应电机的有功功率和无功功率的独立控制。
[1]李建林,许洪华.风力发电中的电力电子变流技术[M].北京:中国轻工业出版社,2003.
[2]卞松江.变速恒频风力发电关键技术研究[D].浙江大学,2003:34-47.
[3]付海涛.变速恒频风力发电系统的建模与仿真研究[D].华中科技大学,2005:35-34.
[4]阮毅,陈伯时.电力拖动自动控制系统——运动控制系统[M].4版.北京:机械工业出版社,2010:1.
[5]李莹.双PWM变流器的建模与控制[D].东北电力大学,2008:2-4.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
装饰装修天地(2019年23期)2019-12-10 09:56:55
电测与仪表(2017年11期)2017-12-26 01:03:22
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年8期)2016-04-15 00:30:06
电测与仪表(2016年2期)2016-04-12 00:24:42
通信电源技术(2016年5期)2016-03-22 01:09:50
云南电力技术(2015年2期)2015-08-23 01:31:52
