
基于公理设计的多目标优化方法研究
2013-12-23 05:17张海杨田启华杜义贤
三峡大学学报(自然科学版) 2013年3期
张海杨 田启华,2 杜义贤,2
(1.三峡大学机械与材料学院,湖北宜昌 443002;2.三峡大学水电机械设备设计与维护湖北省重点实验室,湖北宜昌 443002)
公理设计理论是通过对大量成功的设计案例进行分析归纳,并从中抽象出设计过程的本质.公理设计的最终目标如下:为设计活动建立一个科学的模式,为设计人员提供一个基于逻辑和理性思维过程的理论基础,进而来改进设计活动[1].但公理设计常用于概念设计,很少应用到详细设计阶段中.对于某个给定的结构,多目标优化则是比较有效的设计方法,多目标优化是一个比较具体的过程,更多地涉及到详细设计方面.
多目标优化问题中各目标间往往存在着矛盾,即要求各目标同时达到最优是很困难的,所以最优解不一定存在.而公理设计在处理大规模系统设计问题时有着较强的优势[1],Liu[2]、Hwang[3]、Jeff[4]和王晓勇[5]等应用公理设计中的独立公理,对多目标优化问题进行了改进.
本文基于公理设计理论中的独立公理,在求解多目标优化设计问题的过程中,运用全参直度S(Semangularity)和全能直度R(Reangularity)分析技术来解决多目标优化问题中设计优劣难以评价的问题.
1 基于公理设计的多目标优化方法
公理设计中的独立公理指出:对于一个能够接受的设计,功能要求(FRs)与设计参数(DPs)之间的映射存在一种特定的关系,即每个功能要求能独立地被满足并且不会影响其他功能要求的实现.它们之间的映射可用以下设计方程式来表示[6]:

可简化为:

式中,{FR}为功能要求集,{DP}为设计参数集,[A]为设计矩阵.
若要满足独立公理,设计矩阵就必须是对角矩阵或者三角矩阵.若[A]为对角矩阵,则每一个{DP}满足一个{FR},此种设计为无耦合设计.若[A]为三角矩阵,则只有按一定的顺序确定设计参数,才能使功能要求保持独立性,此种设计为解耦设计.除此之外的设计都是耦合设计,耦合设计是违反独立公理的.
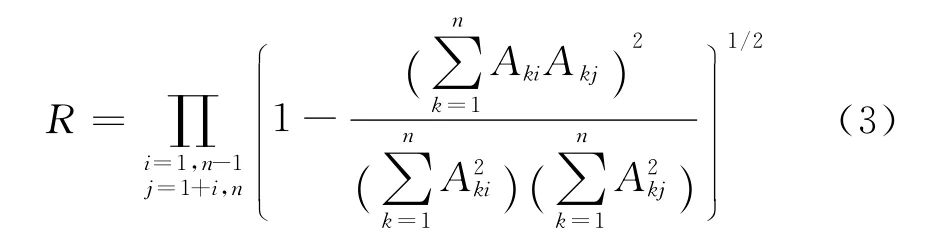
公理设计通过两个量化指标R 和S 来度量FRs之间的独立性.R 被用来测量DPs 之间的交互作用,也就是DPs轴之间的角度关系.R 的表达式可表示如下[1]:
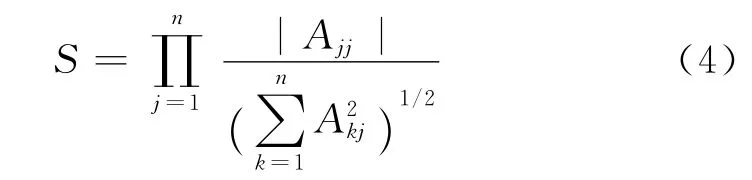
S 被用来测量FRs 和DPs 之间的交互作用,也就是设计矩阵归一化之后其对角线元素的幅值.S 的表达式可表示如下[1]:
大多数工程设计问题都是多目标的优化设计问题,优化设计的表达式为
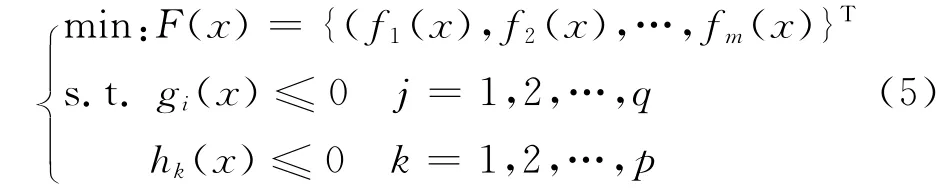
与单目标优化相比,多目标优化在理论与计算方法上都还很不完善,也不够系统[7].所以,本文引入公理设计来完善多目标优化理论和方法体系.其具体步骤如下:
1)获得设计矩阵.实际上,在优化设计问题中的目标函数就相当于功能需求,也就是公理设计中的{FR},影响目标函数值的参数相当于设计参数{DP}(在优化设计中称作设计变量),但在优化设计中,{FR}要通过{DP}以数学公式的形式来表示.
式(2)可写成如下微分形式:

则设计矩阵可变形为:

2)对设计矩阵进行R/S 分析.目标是找到最优的设计参数,使其尽可能完美地满足各功能需求.
由R、S 的定义可知(如图1所示):当R=S=1时,设计是无耦合设计;当R=S 但不等于1时,设计被近似地看作是解耦设计;在仅有两个FRs和DPs时,若R=S,则该设计是解耦设计;其它情况下的设计均为耦合设计.因此,通过R/S 分析可以得到:当设计变量取某一组值时,各目标函数耦合的程度.
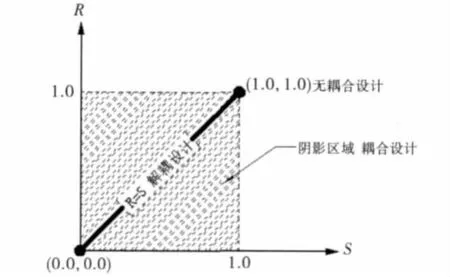
图1 独立空间
3)建立关于R 与S 的目标函数.为了使多目标优化问题简化为可以在二维区域内图形化的问题,并使计算变得相对容易,根据图1将其形式确定如下:

4)利用Matlab强大的数值运算功能和绘图功能,绘制出各目标函数的图形,结合上面步骤得出的结果进行分析.
2 应用分析
2.1 问题求解
以下是一个简单的多目标优化问题,以此来举例说明本文提出的方法.

1)获得设计矩阵.
由式(7)可得设计矩阵

2)对设计矩阵进行R/S 分析.
根据定义域的大小,将设计域均分为4个区域,针对各区域的关键点进行R/S 分析计算.分析结果见表1.

表1 R/S分析结果
3)建立关于R 与S 的目标函数.
由式(8)可得

4)利用Matlab软件绘制出各目标函数的图形,结合前几步得到的结果进行分析.
由以上分析可得,在功能上无耦合的区域中,目标函数的最小值在x=5,y=5处取得.
2.2 应用分析
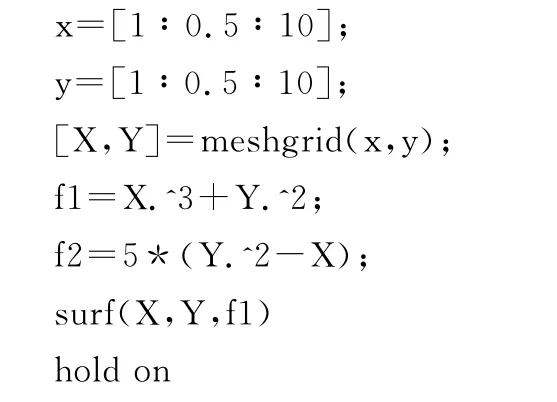
使用Matlab软件可绘制出以上两个目标函数在边界条件内的三维图形,如图2所示,可以清晰地看出目标函数值的变化趋势.

图2 二目标函数的三维曲面表示
其Matlab代码如下:
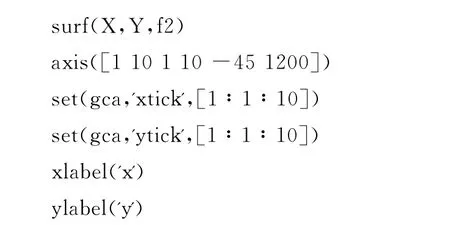
进而使用Matlab软件绘制出以上两个目标函数的二维等高线图,如图3所示.
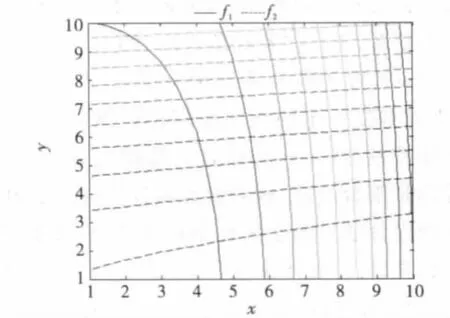
图3 二目标优化问题的二维等高线图
其Matlab代码如下:

下面对图3进行分析.
对于右上区域(点(5,5)和点(10,10)之间的区域),f1与f2近似相互垂直且与y、x 坐标轴各自分别近似平行,系统是近似解耦的.
对于右下区域,只有f1与y 是近似平行的,系统是近似可解耦的.
对于左上、左下区域f1,f2与与y、x 轴都不平行,系统功能上是耦合的.
x,y 与f1,f2之间的关系也可以通过设计矩阵来描述.通过R/S 分析来判断设计矩阵与理想的无耦合矩阵之间的差距.
根据这些分析结果,目标函数的最小值(功能上无耦合)在点(5,5)处取得.因此,该多目标优化问题最优解可以从无耦合的区域中确定.
3 结 语
本文用公理设计理论方法评估多目标优化问题,运用R/S 分析,降低了系统的功能耦合度,达到了更好的设计效果.在今后的研究中可以扩展R 与S 现有的定义,使其包含当设计参数的数目多于目标函数的数目的多目标优化问题.
[1] S N P.Axiomatic Design:Advances and Applications[M].New York:Oxford University Press,2001.
[2] Liu X P,Soderborg N.Improving an Existing Design Based on Axiomatic Design Principles[M].Boston.Massachusetts Institution of Technology,2000.
[3] Hwang K H,Lee K W,Park G J,et al.Robust Design of the Vibratory Gyroscope with Unbalanced Inner Torsion Gimbal Using Axiomatic Design[M].Boston:Massachusetts Institution of Technology,2002.
[4] Jeff Thielman,Ge Ping.Applying Axiomatic Design Theory to the Evaluation and Optimization of Large Scale Engineering Systems[J].Journal of Engineering Design,2006,17(1):1-16.
[5] 王晓勇,唐敦兵,楼佩煌.基于设计公理的多属性决策方法[J].西南交通大学学报,2008,43(3):392-397.
[6] S N P.公理设计发展与应用[M].谢友柏,袁小阳,等译.北京:机械工业出版社,2004.
[7] 黄洪钟,姚新胜,周仲荣.基于满意度原理的装载机工作装置的多目标优化设计[J].机械工程学报,2003,39(5):97-103.
猜你喜欢
数学物理学报(2022年2期)2022-04-26
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
哲学分析(2017年2期)2017-05-02
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
中学生数理化·七年级数学人教版(2016年5期)2016-05-14
大型铸锻件(2015年5期)2015-12-16
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
航空学报(2015年4期)2015-05-07
